雷达资源分配方法、装置和雷达
本发明涉及雷达,具体涉及一种雷达资源分配方法、装置和雷达。
背景技术:
1、雷达在空域探测、空域目标跟踪中被广泛应用。雷达如何分配其资源的的问题也被广泛关注。
2、王祥丽等人在“基于多目标跟踪的相控阵雷达波束和驻留时间联合分配方法[j].雷达学报,2017,6(6):602–610.”针对相控阵可以灵活调整波束指向的特点,通过建立和求解一个在各目标跟踪精度满足一定要求的前提下,最小化总波束驻留时间的非凸优化数学问题来实现资源的联合分配。该文推导了带有资源参数变量的贝叶斯克拉美罗下界(bayesian cramer-rao lower bound,bcrlb)并将它作为跟踪性能的准则。随后针对上述非凸优化问题,该文提出一个先确立波束指向再分配驻留时间的两步分解算法。最后,根据资源分配结果,采用粒子滤波算法实现了多目标跟踪。该文提出的方法,和平均分配资源的固定操作方式相比,节约了系统资源而且能保证坏目标的跟踪性能。
3、石兆等人在“面向目标搜索与跟踪的组网雷达功率时间联合优化分配算法[j].战术导弹技术,2022(5):12-23.”中将最小化组网雷达总辐射消耗作为优化目标,建立了面向目标搜索与跟踪的组网雷达功率时间联合优化分配数学模型,联合优化雷达节点选择方式、辐射功率和驻留时间分配。,所提算法能够在满足预先设定的目标搜索和多目标跟踪性能要求的条件下,消耗最少的射频辐射资源,提升组网雷达的射频隐身性能。
4、然而,“基于多目标跟踪的相控阵雷达波束和驻留时间联合分配方法”的方法对波束的分配直接采取跟踪上一时刻跟踪精度最差的目标,波束分配考虑过于简单片面,不能满足实际要求。“面向目标搜索与跟踪的组网雷达功率时间联合优化分配算法”中分配场景为雷达资源充足,能够完成对空域搜索对目标跟踪的要求,均无法解决组网内协同完成对目标的各种任务时,需要相控阵雷达在保持特定空域搜索探测能力前提下,将跟踪范围内目标跟踪到指定精度后移交给后续任务节点的场景下,而空域内存在过多目标导致相控阵雷达资源不足的问题。
技术实现思路
1、针对上述技术问题,本发明提供了一种雷达资源分配方法、装置和雷达,能够在空域内存在过多目标导致相控阵雷达资源不足时,合理选择跟踪目标、分配雷达资源。
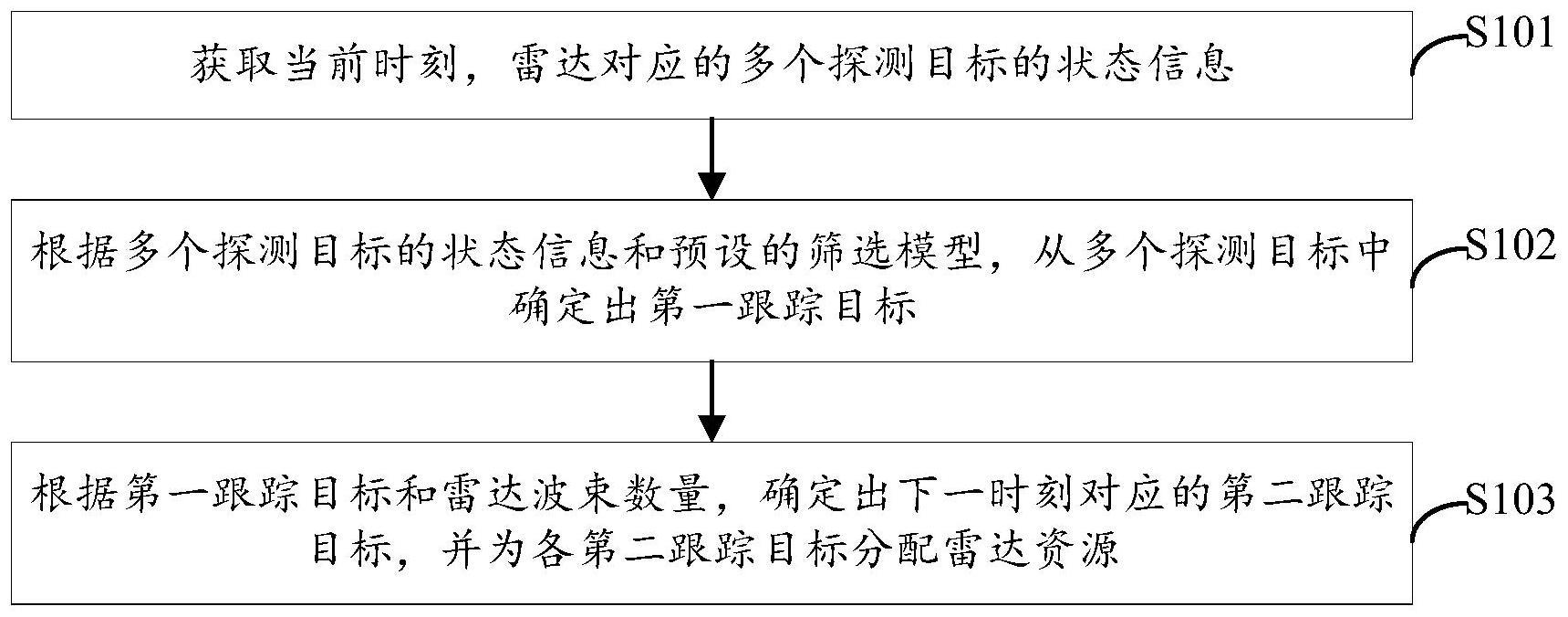
2、第一方面,本发明提供一种雷达资源分配方法,应用于雷达,包括:获取当前时刻,雷达对应的多个探测目标的状态信息,状态信息包括位置、速度;根据多个探测目标的状态信息和预设的筛选模型,从多个探测目标中确定出第一跟踪目标;根据第一跟踪目标和雷达波束数量,确定出下一时刻对应的第二跟踪目标,并为各第二跟踪目标分配雷达资源。
3、可选的,根据多个探测目标的状态信息和预设的筛选模型,从多个探测目标中确定出第一跟踪目标之前,方法还包括:确定k时刻各探测目标的加权平均跟踪误差,k为正数;确定k时刻威胁度加权的未跟踪至目标精度的探测目标的数量;根据确定k时刻各探测目标的加权平均跟踪误差和确定k时刻威胁度加权的未跟踪至目标精度的探测目标的数量,构建筛选模型。
4、可选的,筛选模型表示为:
5、
6、
7、
8、
9、
10、其中,q为雷达对应的探测目标的总数,q为第q个探测目标,ωq,k为第q个探测目标的优先级,为跟踪精度误差,为目标分配参数,sq,k为资源变量,ηfin为目标精度,l为雷达可生成波束数,stot为系统总资源,smin和smax分别为可分配最小资源和最大资源。
11、可选的,根据第一跟踪目标和雷达波束数量,确定出下一时刻对应的第二跟踪目标,并为各第二跟踪目标分配雷达资源,包括:若第一跟踪目标的数量大于或等于雷达波束数量,则按照当前时刻各第一跟踪目标的加权平均跟踪误差由大到小的顺序,选取雷达波束数量个目标作为下一时刻对应的第二跟踪目标,并按照第一公式为各第二跟踪目标分配雷达资源,第一公式表示为:
12、
13、
14、smin≤sq,k≤smax
15、
16、其中,q表示雷达对应的探测目标的总数,q表示第q个探测目标,ωq,k表示第q个探测目标的优先级,表示跟踪精度误差,表示目标分配参数,sq,k表示资源变量,stot表示系统总资源,smin和smax分别表示可分配最小资源和最大资源,ω2表示下一时刻对应的第二跟踪目标。
17、可选的,根据第一跟踪目标和雷达波束数量,确定出下一时刻对应的第二跟踪目标,并为各第二跟踪目标分配雷达资源,包括:若第一跟踪目标的数量小于雷达波束数量,则将第一跟踪目标确定为下一时刻对应的第二跟踪目标,并根据预设的筛选模型为各第二跟踪目标分配雷达资源。
18、可选的,确定k时刻各探测目标的加权平均跟踪误差,包括:根据k时刻各探测目标对应的状态向量和预设的量测模型,确定各探测目标对应的跟踪优化准则,状态向量包括探测目标的位置和速度;根据各探测目标对应的跟踪优化准则,确定k时刻各探测目标的加权平均跟踪误差。
19、可选的,跟踪优化准则表示为:
20、
21、
22、
23、其中,表示k时刻,探测目标q的预测条件克拉美罗下界pc-crlb矩阵,qq,k表示过程噪声协方差矩阵,cq,k-1|k-1表示k-1时刻的目标误差协方差矩阵,其中,是维度为nz×nx的量测函数hq,k(xq,k)的雅克比矩阵,nz为量测向量维数,nx为状态向量维数,表示目标q的预测条件克拉美罗下界,cpc-crlb(1,1)和cpc-crlb(3,3)分别表示pc-crlb对角线上的第1个和第3个分量。
24、第二方面,本发明提供了一种雷达资源分配装置,包括:
25、获取模块,用于获取当前时刻,雷达对应的多个探测目标的状态信息,状态信息包括位置、速度。
26、确定模块,用于根据多个探测目标的状态信息和预设的筛选模型,从多个探测目标中确定出第一跟踪目标。
27、确定模块,还用于根据第一跟踪目标和雷达波束数量,确定出下一时刻对应的第二跟踪目标,并为各第二跟踪目标分配雷达资源。
28、可选的,确定模块具体用于确定k时刻各探测目标的加权平均跟踪误差,k为正数;确定k时刻威胁度加权的未跟踪至目标精度的探测目标的数量;根据确定k时刻各探测目标的加权平均跟踪误差和确定k时刻威胁度加权的未跟踪至目标精度的探测目标的数量,构建筛选模型。
29、可选的,筛选模型表示为:
30、
31、
32、
33、
34、
35、其中,q为雷达对应的探测目标的总数,q为第q个探测目标,ωq,k为第q个探测目标的优先级,为跟踪精度误差,为目标分配参数,sq,k为资源变量,ηfin为目标精度,l为雷达可生成波束数,stot为系统总资源,smin和smax分别为可分配最小资源和最大资源。
36、可选的,确定模块具体用于若第一跟踪目标的数量大于或等于雷达波束数量,则按照当前时刻各第一跟踪目标的加权平均跟踪误差由大到小的顺序,选取雷达波束数量个目标作为下一时刻对应的第二跟踪目标,并按照第一公式为各第二跟踪目标分配雷达资源,第一公式表示为:
37、
38、
39、smin≤sq,k≤smax
40、
41、其中,q表示雷达对应的探测目标的总数,q表示第q个探测目标,ωq,k表示第q个探测目标的优先级,表示跟踪精度误差,表示目标分配参数,sq,k表示资源变量,stot表示系统总资源,smin和smax分别表示可分配最小资源和最大资源,ω2表示下一时刻对应的第二跟踪目标。
42、可选的,确定模块具体用于若第一跟踪目标的数量小于雷达波束数量,则将第一跟踪目标确定为下一时刻对应的第二跟踪目标,并根据预设的筛选模型为各第二跟踪目标分配雷达资源。
43、可选的,确定模块具体用于根据k时刻各探测目标对应的状态向量和预设的量测模型,确定各探测目标对应的跟踪优化准则,状态向量包括探测目标的位置和速度;根据各探测目标对应的跟踪优化准则,确定k时刻各探测目标的加权平均跟踪误差。
44、可选的,跟踪优化准则表示为:
45、
46、
47、
48、其中,表示k时刻,探测目标q的预测条件克拉美罗下界pc-crlb矩阵,qq,k表示过程噪声协方差矩阵,cq,k-1|k-1表示k-1时刻的目标误差协方差矩阵,其中,是维度为nz×nx的量测函数hq,k(xq,k)的雅克比矩阵,nz为量测向量维数,nx为状态向量维数,表示目标q的预测条件克拉美罗下界,cpc-crlb(1,1)和cpc-crlb(3,3)分别表示pc-crlb对角线上的第1个和第3个分量。
49、第三方面,本发明还提供了一种雷达,包括:至少一个处理器;以及与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行如第一方面及第一方面的可选方式所提供的方法。
50、第四方面,本发明提供了一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,计算机执行指令被处理器执行时用于实现如第一方面或第一方面的可选方式所提供的方法。
51、第五方面,本发明提供了一种计算机程序产品,包括计算机程序/指令,该计算机程序/指令被处理器执行时实现如第一方面或第一方面的可选方式所提供的方法。
52、本发明的有益效果:
53、本发明提供的雷达资源分配方法,通过获取当前时刻,雷达对应的多个探测目标的状态信息,状态信息包括位置、速度;根据多个探测目标的状态信息和预设的筛选模型,从多个探测目标中确定出第一跟踪目标;根据第一跟踪目标和雷达波束数量,确定出下一时刻对应的第二跟踪目标,并为各第二跟踪目标分配雷达资源,能够合理选择跟踪目标、分配雷达资源,提高雷达资源利用率,提升跟踪效果。
- 还没有人留言评论。精彩留言会获得点赞!