大气数据系统的制作方法
本发明涉及大气参数测量,具体涉及一种大气数据系统。
背景技术:
1、大气数据系统用于测量飞机空速、气压高度、攻角等飞行大气参数,是飞行安全关键系统。传统大气数据系统使用总压探头、静压孔、总温传感器等接触式传感器感受大气来流,由于每种受感器的功能是唯一的,因此传统大气数据系统单个余度内部无法识别单点故障。为了保障飞行安全,需要配备多套冗余备份的大气数据受感器和传感器,从而在多个余度的同类受感器中识别单点故障,但仍然不能避免出现如空速管结冰、攻角传感器故障等共模故障导致全机大气数据系统失效的情况。
2、近年来,基于激光遥感原理的激光大气数据传感器取得了较大发展。激光大气数据传感器从原理来分类可分为(1)使用红外激光探测气溶胶,仅测量运动信息的红外激光传感器(红外激光大气数据系统);(2)使用绿光/紫外激光探测气体分子,可测量所有飞行大气参数的紫外激光传感器(紫外激光大气数据系统)两种。典型的混合式大气数据系统主要考虑的是基于紫外激光传感器和其他原理大气传感器组成的系统,例如us011169173b2公开的混合式大气数据系统选用了紫外激光传感器和超声波传感器;美国专利us10444367b2公开的相关混合式大气数据系统使用了额外的静压源帮助紫外激光传感器进行气压高度、大气静温计算。
3、对于红外激光传感器,红外激光传感器测量真空速、攻角、侧滑角等运动信息,与基于动压测量的指示空速相比,激光真空速不受传感器安装位置影响,测量精度高。为了弥补红外激光传感器测量参数较少的缺陷,常规的方法是使用额外的静压源(静压孔)、温度传感器与红外激光传感器进行组合。但对于主流民用飞机,静压的测量以及静压源的校准是大气数据各参数测量中难度较高的项目,难点主要在于静压的感受与受感器设计、机体气动外形、安装位置等多种影响因素相关,无法单纯依靠提高压力传感器精度提高静压测量精度。
4、现阶段在民用飞机静压校准试飞科目中,使用伴随试飞、前置杆、拖锥等尽量远离飞机机体的静压测量方法作为基准源,这些方法存在测量点距飞机较远、测量基准不一致等缺点,不是理论上的最优解决方案。与常规静压受感器相比,总压探头、总温传感器等常规大气数据探头具有受安装位置影响相对较小、误差较为固定的特点。对于总压、总温等参数在静压测量方面的应用还缺少发掘。
技术实现思路
1、本发明的目的在于提供一种大气数据系统,以解决现有大气数据系统中静压测量难度大、静压试飞校准数据源不可靠的问题。
2、为实现上述目的,本发明提供了以下技术方案:
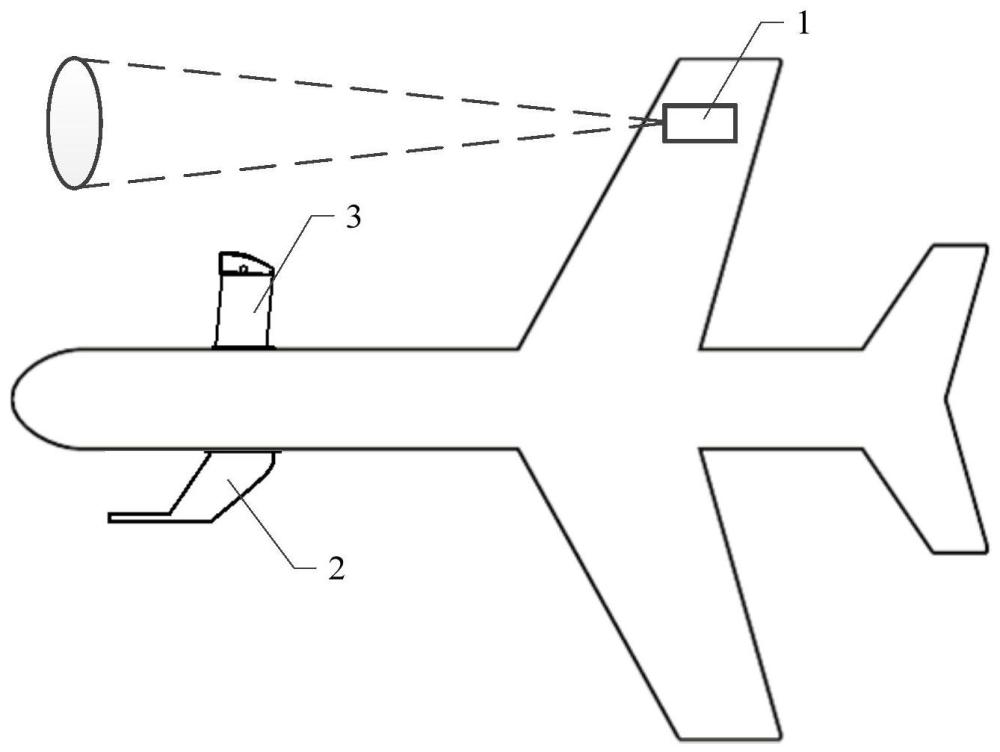
3、本发明提供的一种大气数据系统,布置于飞机机体上,包括:红外激光传感器、总压探头、总温传感器、多个大气数据模块以及大气数据计算机;
4、所述总压探头通过所述大气数据模块与所述大气数据计算机通信连接;所述总温传感器以及红外激光传感器分别与所述大气数据计算机通信连接。
5、可选的或优选的,所述大气数据系统还包括静压孔和角度传感器;所述静压孔通过所述大气数据模块与所述大气数据计算机通信连接;
6、所述角度传感器包括攻角传感器和侧滑角传感器;所述攻角传感器和侧滑角传感器分别与所述大气数据计算机通信连接。
7、一种大气数据解算方法,包括以下步骤:
8、s1、获得关键参数,所述关键参数包括大气动压、大气总温、大气静压、激光三轴视线速度、攻角以及侧滑角;
9、获得所述关键参数的方法,包括以下步骤:
10、s11、通过所述红外激光传感器得到激光三轴视线速度,并将所述激光三轴视线速度发送至所述大气数据计算机;
11、s12、所述总压探头感受来流,通过大气数据模块将大气总压压力参数转化为大气总压电信号并发送至所述大气数据计算机;
12、s13、所述总温传感器感受来流,并将大气总温发送至所述大气数据计算机;
13、s14、所述静压孔感受相对静止大气环境,通过大气数据模块将大气静压参数转化为大气静压电信号并发送至所述大气数据计算机;
14、s15、所述攻角传感器感受来流与飞机水平面的夹角并得到攻角,后将所述攻角数据发送至所述大气数据计算机;
15、s16、所述侧滑角传感器感受来流于飞机竖直面的夹角并得到侧滑角,后将所述侧滑角数据发送至所述大气数据计算机;
16、s2、基于上述关键参数,所述大气数据计算机对大气数据进行解算,得到飞行大气参数。
17、可选的或优选的,s11中所述红外激光传感器得到所述激光三轴视线速度的方法,包括以下步骤:
18、s111、所述红外激光传感器向飞机外部发射扫描激光束,扫描激光束通过机械扫描或者动态扫描的原理,在不同时间指向不同方向,在每个方向与大气发生作用,并与大气中气溶胶发生散射,产生携带有多普勒频移的散射光并被所述红外激光传感器接收;
19、s112、分析解算后得到所述红外激光传感器在每个方向与大气的相对速度;当扫描激光束的扫描方向不少于3个时,从而得到表征空间三维运动关系的激光三轴视线速度。
20、可选的或优选的,s2中所述大气数据计算机基于关键参数对大气数据进行解算的解算方法,包括以下步骤:
21、s21、通过激光三轴视线速度解算得到激光三轴矢量空速:
22、[vx,vy,vz]=mp[v1,v2,v3....vn]
23、式中[vx,vy,vz]为激光三轴矢量空速,其中vx为x轴激光矢量空速;vy为y轴激光矢量空速,vz为z轴激光矢量空速;[v1,v2,v3…vn]为激光三轴视线速度101,其中vn为第n个探测方向的视线速度;mp为激光三轴视线速度到激光三轴矢量空速的转换矩阵;
24、s22、通过激光三轴矢量空速解算得到激光攻角、激光侧滑角、激光真空速:
25、tasl=(vx2+vy2+vz2)0.5
26、αl=atan(vy/vx)
27、βl=atan(vz/(vx2+vy2)0.5)
28、式中,tasl为激光真空速,αl为激光攻角,βl为激光侧滑角;
29、s23、通过激光真空速和大气总温计算激光马赫数:
30、ml=tasl/(5208tat-0.2tasl2)0.5
31、式中,ml为激光马赫数,tat为大气总温;
32、s24、通过激光马赫数和大气总温解算得到激光大气静温:
33、satl=tat/(1+0.2ml2)
34、式中,satl为激光大气静温;
35、s25、通过激光大气静温解算得到激光声速:
36、al=38.96695satl0.5
37、式中,al为激光声速;
38、s26、通过激光马赫数和大气总压解算得到激光大气静压:
39、psl=pt/(1+ml2/5)3.5
40、式中,psl为激光大气静压,pt为大气总压;
41、s27、通过激光大气静压解算激光气压高度:
42、hpl=-0.01122psl3+3.0556psl2-371.7845psl+17.905
43、式中,hpl为激光气压高度;
44、s28、通过激光激光气压高度解算得到激光升降速度:
45、dhpl=(hpl1-hpl0)/dt
46、式中,dhpl为激光升降速度,hpl1为当前时刻的激光气压高度,hpl0为上一时刻的激光气压高度,dt为当前时刻和上一时刻的时间差;
47、s29、通过激光大气静压和大气总压解算得到激光动压:
48、qcl=pt-psl
49、式中,qcl为激光动压;
50、s210、通过激光动压解算得到激光指示空速:
51、iasl=0.001qcl5-0.0598qcl4+1.3327qcl3-14.529qcl2+101.81qcl+47.71
52、式中,iasl为激光指示空速;
53、s211、通过大气总压和大气静压解算得到大气动压:
54、qc=pt-ps
55、式中,qc为大气动压,ps为大气静压;
56、s212、通过大气总压和大气静压解算得到马赫数:
57、m=(5(pt/ps)2/7-1)0.5
58、式中,m为马赫数;
59、s213、通过马赫数和大气总温解算得到真空速:
60、tas=m((tat/(1+0.2m2))0.5)
61、式中,tas为真空速;
62、s214、通过真空速、攻角、侧滑角解算得到三轴矢量空速:
63、vxp=tas/((1+tan2α)(1+tan2β))0.5
64、vyp=tanαtas/((1+tan2α)(1+tan2β))0.5
65、vzp=tanβtas/(1+tan2β)0.5
66、式中,vxp为x轴矢量空速;vyp为y轴矢量空速;vzp为z轴矢量空速;三轴矢量空速为[vxp,vyp,vzp];
67、s215、通过大气动压解算得到指示空速:
68、ias=0.001qc5-0.0598qc4+1.3327qc3-14.529qc2+101.81qc+47.71
69、式中,ias为指示空速;
70、s216、通过马赫数和大气总温解算得到大气静温:
71、sat=tat/(1+0.2m2)
72、式中,sat为大气静温;
73、s217、通过大气静温解算得到声速:
74、a=38.96695sat0.5
75、式中,a为声速;
76、s218、通过大气静压解算得到气压高度:
77、hp=-0.01122ps3+3.0556ps2-371.7845ps+17.905
78、式中,hp为气压高度;
79、s219、通过气压高度解算升降速度:
80、dhp=(hp1-hp0)/dt
81、式中,dhp为升降速度,hp1为当前时刻的气压高度,hp0为上一时刻的气压高度,dt为当前时刻和上一时刻的时间差。
82、一种单点故障定位方法,所述大气数据系统的大气解算方法通过不同的传感器解算得到两套相对独立的飞行大气参数,通过对两套飞行大气参数进行数据对比,以定位大气数据系统中的单点故障以及失效的传感器。
83、可选的或优选的,通过对两套飞行大气参数进行数据对比的方法,包括以下步骤:
84、s61、当攻角与激光攻角不一致或侧滑角与激光侧滑角不一致,且气压高度与激光气压高度不一致、真空速与激光真空速不一致、马赫数与激光马赫数不一致时,红外激光传感器失效;
85、s62、当攻角与激光攻角一致或侧滑角与激光侧滑角一致,且气压高度与激光气压高度不一致、真空速与激光真空速不一致、马赫数与激光马赫数一致时,总压探头或与总压探头配套的大气数据模块失效;
86、s63、当攻角与激光攻角一致或侧滑角与激光侧滑角一致,且气压高度与激光气压高度不一致、真空速与激光真空速一致、马赫数与激光马赫数一致时,静压孔或与静压孔配套的大气数据模块失效;
87、s64、当攻角与激光攻角一致或侧滑角与激光侧滑角一致,且气压高度与激光气压高度不一致、真空速与激光真空速不一致、马赫数与激光马赫数不一致时,总温传感器失效;
88、s65、当攻角与激光攻角不一致但侧滑角与激光侧滑角一致,且气压高度与激光气压高度一致、真空速与激光真空速一致、马赫数与激光马赫数一致时,攻角传感器失效;
89、s66、当攻角与激光攻角一致但侧滑角与激光侧滑角不一致,且气压高度与激光气压高度一致、真空速与激光真空速一致、马赫数与激光马赫数一致时,侧滑角传感器失效。
90、基于上述技术方案,本发明至少可以产生如下技术效果:
91、(1)本发明提供的一种大气数据系统能够通过红外激光传感器、总压探头和总温探头三种大气数据传感器实现全部飞行大气参数的测量;
92、(2)通过红外激光传感器、总压探头、静压孔、总温探头和角度传感器实现全部飞行大气参数的测量,且实现非相似余度测量;
93、(3)通过对由红外激光传感器、总压探头、静压孔、总温探头和角度传感器构成的大气数据系统输出参数一致性的判断,实现对系统内单点故障和失效传感器的定位。
- 还没有人留言评论。精彩留言会获得点赞!