切割作物监测的制作方法
本公开涉及监测在田间铺放的或在切割处理中的切割作物以及切割作物监测系统。
背景技术:
1、许多农业处理涉及切割作物并将至少一部分切割作物保留在田间一段时间。例如,干草制作处理通常包括割草或其它草本作物并将其铺放在田间以使其变干。根据干燥程度,切割作物可以通过打包收集为青贮饲料、半干草饲料或干草。控制干燥处理和管理霉菌形成是干草制作处理的重要方面。监测、控制和管理切割作物的状况在涉及在田间铺放的切割作物的其它农业处理中是重要的。这些处理可以针对包括如下的切割作物:亚麻作物;诸如谷壳、稻草和残渣的谷物收割的副产物;以及根茎作物收割的副产物,例如马铃薯作物的茎秆头部或甜菜的切碎/覆盖的叶子。
2、本公开提供了一种用于监测田间的切割作物以改进相关联的农业处理的系统和方法。
技术实现思路
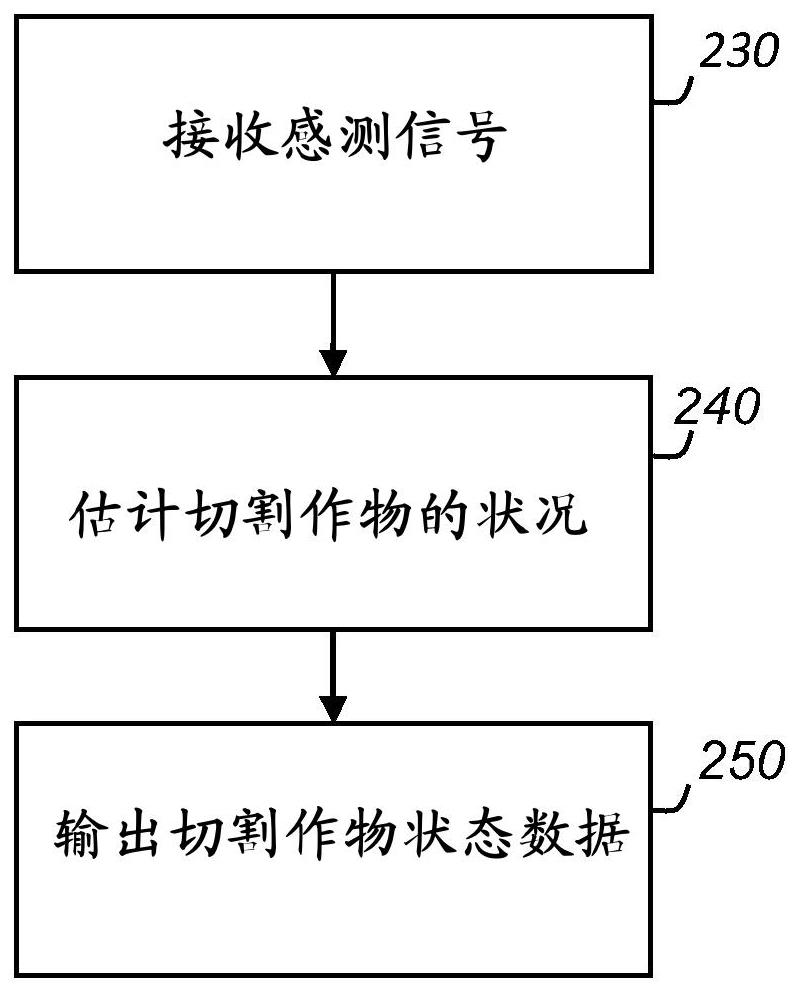
1、根据本公开的第一方面,提供了一种监测在田间铺放的或在切割处理中的切割作物的方法,所述方法包括:
2、从位于移动农业机械上的切割作物传感器接收感测信号,其中,感测信号表示与切割作物相关联的感测的气体成分;
3、基于感测信号估计切割作物的状况;以及
4、输出包括切割作物的状况的切割作物状态数据。
5、该方法还可以包括从定位在移动农业机械上的位置传感器接收位置数据,并且将切割作物状态数据输出作为状况值的阵列,每个状况值与移动农业机械的位置相关联。
6、该方法可以包括将切割作物状态数据输出作为表示跨越田间区域的切割作物状况的测绘数据。
7、该方法可以包括:
8、基于切割作物的状况确定与对切割作物的一个或多个处理操作相关的一个或多个处理参数,其中一个或多个处理参数对应于以下中的任一个:处理操作的定时参数、位置参数、选择参数和/或强度参数;以及
9、将处理参数输出作为切割作物状态数据的一部分。
10、该方法可以包括:
11、基于切割作物的状况选择一个或多个未来处理操作;以及
12、将一个或多个选择的未来处理操作输出作为切割作物状态数据的一部分。
13、该方法可以包括基于切割作物状态数据选择性地处理田间。
14、该方法可以包括基于切割作物状态数据处理田间的选定位置。
15、处理田间可以包括以下中的一个或多个:
16、重新布置切割作物;
17、调节切割作物;
18、喷洒切割作物;
19、收集切割作物;以及
20、将切割作物耕种入田间。
21、估计切割作物的状况可以包括通过将感测信号与参考气味库进行比较来估计切割作物的状况。
22、估计切割作物的状况可以包括:
23、将感测信号与表示切割作物的先前状态的参考信号进行比较,以确定切割作物的状况的相对变化和/或切割作物的状况的变化率;以及
24、将切割作物的状况的变化和/或变化率输出作为切割作物状态数据的一部分。
25、估计切割作物的状况可以包括:
26、将感测信号与表示与切割作物相关联的先前气体成分的参考感测信号进行比较;以及
27、基于感测的气体成分的相对变化来估计切割作物的状况。
28、切割作物的状况可以表示以下中的一个或多个:
29、切割作物的干燥状态;
30、切割作物的发酵状态;
31、切割作物的腐烂状态;以及
32、切割作物的分解状态。
33、参考气味库可以包括用于一种或多种切割作物类型的,与以下中的一个或多个相对应的一个或多个参考信号:
34、切割作物的干燥状态;
35、切割作物的发酵状态;
36、切割作物的腐烂状态;以及
37、切割作物的分解状态。
38、切割作物可以包括以下中的任一种:干草、草、亚麻、谷物、谷壳、稻草、残渣、叶、茎、秆、籽荚、壳、顶、切碎的作物、覆盖的作物或茎叶。
39、输出切割作物状态数据可以包括将切割作物状态数据输出至以下中的一个或多个:
40、远程监测模块;
41、农用车辆的驾驶室显示单元;或
42、移动农业机械的控制系统,控制系统用于控制移动农业机械的一个或多个操作参数。
43、根据本公开的第二方面,提供了一种切割作物监测系统,包括:
44、移动农业机械,包括切割作物传感器,切割作物传感器能够感测与在田间铺放的或在切割处理中的切割作物相关联的气体成分;以及
45、控制器,被配置为:
46、从切割作物传感器接收感测信号,其中感测信号表示与切割作物相关联的气体成分;
47、基于感测信号估计切割作物的状况;以及
48、输出表示切割作物的状况的切割作物状态数据。
49、控制器可以被配置为:
50、通过将感测信号与参考气味库进行比较来估计切割作物的状况。
51、切割作物传感器可以包括含有多个传感器元件的传感器阵列。感测信号可以包括用于每个传感器元件的元件响应信号。控制器可以被配置为将元件响应信号的组合与参考气味库的一个或多个参考信号组合进行比较。
52、切割作物传感器可以包括电子鼻。
53、切割作物传感器可以定位于距地面或移动农业机械与地面的接触点的阈值感测高度内。阈值感测高度可以包括1米,优选0.5米,更优选0.3米。切割作物传感器可以包括输入管道,用于将气体成分送至切割作物传感器的活性区域。切割作物传感器可以包括活性空气装置,用于产生从输入管道的远端到与传感器的活性区域相邻的输入管道的近端的气流。阈值感测高度可以是相对于输入管道的远端的。
54、切割作物的状况可以表示以下中的一个或多个:
55、切割作物的干燥状态;
56、切割作物的发酵状态;
57、切割作物的腐烂状态;以及
58、切割作物的分解状态。
59、参考气味库可以包括用于一种或多种切割作物类型的,对应于以下中的一个或多个的一个或多个参考信号组合:
60、切割作物的干燥状态;
61、切割作物的发酵状态;
62、切割作物的腐烂状态;以及
63、切割作物的分解状态。
64、切割作物传感器可以被配置为检测与铺放在田间的切割作物相关联的气体成分的至少一种挥发性组分。
65、控制器可以被配置为:
66、将感测信号与表示切割作物的先前状态的参考信号进行比较,以确定切割作物的状况的变化;以及
67、将切割作物的状况的变化输出作为切割作物状态数据的一部分。
68、移动农业机械可以包括能够检测移动农业机械的位置的位置传感器。控制器可以被配置为:
69、从位置传感器,例如gps传感器,接收位置数据;以及
70、输出包括状况值的阵列的切割作物状态数据,每个状况值与移动农业机械的检测到的位置相关联。
71、控制器可以被配置为输出包括表示跨越田间区域的切割作物状况的测绘数据的切割作物状态数据。
72、控制器可以被配置为基于位置数据选择性地启用切割作物传感器和/或选择性地估计切割作物的状况。
73、控制器可以被配置为:
74、接收指示田间的一个或多个感兴趣区域的田间数据;以及
75、基于田间数据和位置数据选择性地启用切割作物传感器、选择性地估计切割作物的状况和/或选择性地调整切割作物传感器的采样率。
76、田间数据可以指示:田间入口;田间边界;和/或易受霉菌或湿气影响的区域。
77、移动农业机械可以被配置为基于切割作物状态数据选择性地处理田间。
78、移动农业机械可以被配置为基于切割作物状态数据处理田间的选定位置。
79、移动农业机械可以被配置为通过执行以下中的一个或多个来选择性地处理田间:
80、重新布置切割作物;
81、调节切割作物;
82、喷洒切割作物;
83、收集切割作物;以及
84、将切割作物耕种入田间。
85、移动农业机械可以包括以下中的一个或多个:耙;割草机;浸渍器;打包机;耕作机具;拖拉机;饲料运输车;无人机;和侦察机。
86、移动农业机械可以包括农业车辆和/或农业机具。
87、移动农业机械可以包括手动、半自动或自动操作的车辆和/或机具。
88、切割作物可以包括以下中的任一种:干草、草、亚麻、谷物、谷壳、稻草、残渣、叶、茎、秆、籽荚、壳、顶、切碎的作物、覆盖的作物或茎叶。
89、可以提供一种计算机程序,当在计算机上运行时,使得计算机配置包括本文公开的电路、控制器或设备的任何装置,或者执行本文公开的任何方法。计算机程序可以是软件实现,并且计算机可以被认为是任何适当的硬件,作为非限制性示例,包括数字信号处理器、微控制器、以及只读存储器(rom)、可擦除可编程只读存储器(eprom)或电可擦除可编程只读存储器(eeprom)中的实现。软件可以是汇编程序。
90、计算机程序可以提供在计算机可读介质上,计算机可读介质可以是诸如光盘或存储器设备的物理计算机可读介质,或者可以体现为瞬态信号。这种瞬态信号可以是网络下载,包括因特网下载。可以提供存储计算机可执行指令的一个或多个非瞬态计算机可读存储介质,所述计算机可执行指令在由计算系统执行时使计算系统执行本文公开的任何方法。
- 还没有人留言评论。精彩留言会获得点赞!