一种低慢小目标探测系统多源数据融合方法与流程
本发明涉及目标探测,尤其涉及一种低慢小目标探测系统多源数据融合方法。
背景技术:
1、常见的低慢小目标包括多旋翼无人机、航拍气球、动力三角翼等,无人机在进行探测过程中按照事先设定好的方向以及速度进行飞行,在飞行过程中,会受到外界因素的影响,在飞行过程中存在以下影响因素:
2、①:无人机在飞行过程中,受到外界风速的影响,根据无人机设定信息进行飞行过程中,影响无人机的飞行速度以及飞行状态;
3、②:无人机在飞行过程中受到外界风速的影响,易于发生安全隐患,影响无人机探测时的安全性;
4、③无人机在飞行过程中在多个方向进行飞行,在每个方向进行飞行过程中,受到的外界风的影响大小不同,同时在不同时间外界风的影响因素会变化,调节难度大,因此本发明提出了一种低慢小目标探测系统多源数据融合方法。
技术实现思路
1、针对现有技术存在的不足,本发明目的是提供一种低慢小目标探测系统多源数据融合方法,本发明对无人机探测过程中的设定参数进行获取,根据设定参数对环境信息进行获取,对环境信息进行分析判断,得到环境数据,对环境数据与设定参数进行数据融合,得到实际运行参数,根据实际运行参数进行无人机的控制,提高无人机探测的安全性。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:一种低慢小目标探测系统多源数据融合方法,所述数据融合方法具体包括以下步骤:
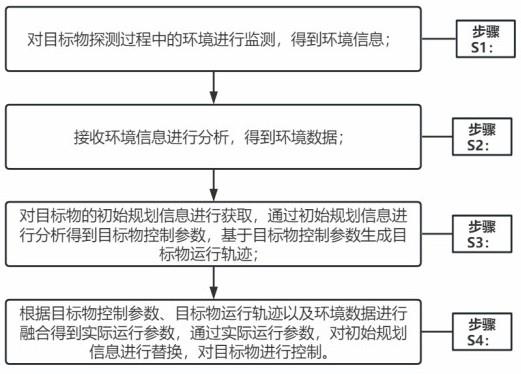
3、步骤s1:对目标物探测过程中的环境进行监测,得到环境信息;
4、步骤s2:接收环境信息进行分析,得到环境数据;
5、步骤s3:对目标物的初始规划信息进行获取,通过初始规划信息进行分析得到目标物控制参数,基于目标物控制参数生成目标物运行轨迹;
6、步骤s4:根据目标物控制参数、目标物运行轨迹以及环境数据进行融合得到实际运行参数,控制模块接收实际运行参数,对初始规划信息进行替换,通过实际运行参数对目标物进行控制。
7、进一步地,所述步骤s1中,对环境信息进行获取具体步骤如下:
8、步骤s11:对目标物的位置信息进行获取,对目标物探测过程中的图像信息进行录像;
9、步骤s12:对目标物飞行过程中的风力数值的风力方向进行获取;
10、步骤s13:根据风力方向对风力与水平方向的角度进行获取,得到风向角度值,获取的风向角度值、风力数值、位置信息以及图像信息为环境信息。
11、进一步地,所述步骤s2中,对环境信息进行分析具体步骤如下:
12、步骤s21:通过位置信息对目标物的飞行高度进行获取,对每个飞行高度的持续时间进行获取,得到第一时间段至第z时间段;
13、步骤s22:通过不同的飞行高度,对每个时间段内的风力数值进行获取,若出现风力数值相同,则风力数值相同的时间段进行求和,由此对每个风力数值持续时间进行获取,得到第一持续时间、第二持续时间……第a持续时间;
14、步骤s23:通过图像信息实时对无人机获取的图像进行观察,获取图像中物体作为参照物体,观察参照物体在图片中是否显示,若不显示,判断为地面模糊图像,对获取地面模糊图像对应时间点时的无人机高度,得到飞行能见度值,通过服务器对无人机临界能见度值进行获取;
15、步骤s24:若飞行能见度值大于临界能见度值,则判断无人机适合飞行,若飞行能见度值小于临界能见度值,则判断无人机不适合飞行,对无人机飞行过程中的风力风机进行获取,若风力等级不小于3级,则判断无人机不适合飞行;
16、步骤s25:分析获取的多个风力数值、每个风力数值的持续时间以及风向角度值为环境数据。
17、进一步地,所述步骤s3中,对目标物控制参数进行获取具体如下:
18、步骤s31:对初始规划信息中目标物探测过程中的运行速度、每个运行速度的持续时间以及运行方向进行获取;
19、步骤s32:对目标物的探测时间进行获取,得到探测时间t,在t时间段内,对运行速度变化次数进行获取,得到w个运行速度;
20、步骤s33:分别对w个运行速度的运行时间进行获取,得到w个运行时间,运行时间分别t1、t2……tw,其中,t=t1+t2……tw;对设定运行方向的个数进行获取,得到m个运行方向;
21、步骤s34:对m个运行方向的运行轨迹进行获取。
22、进一步地,所述步骤s34中,对m个运行方向的运行轨迹进行获取具体如下:
23、步骤s341:对第一个运行方向内运行速度的个数进行获取,得到k1个运行速度,对每个运行速度的运行时间进行获取,得到k1个运行时间,通过运行方向、运行速度以及对应运行速度的运行时间,对第一个运行方向的运行路程进行获取,根据运行路程,设定绘图比例,绘制第一运行线段,在第一运行线段对应位置标记其对应的运行速度以及运行时间;
24、步骤s342:对第二个运行方向内运行速度的个数进行获取,得到k2个运行速度,对每个运行速度的运行时间进行获取,得到k2个运行时间,通过运行方向、运行速度以及对应运行速度的运行时间,对第二个运行方向的运行路程进行获取,根据运行路程,绘制第二运行线段,第二运行线段首端与第一运行线段尾端相连,在第二运行线段对应位置标记其对应的运行速度以及运行时间;
25、步骤s343:由此,对第m个运行方向内运行速度的个数进行获取,得到kn个运行速度,对每个运行速度的运行时间进行获取,得到km个运行时间,通过运行方向、运行速度以及对应运行速度的运行时间,对第m个运行方向的运行路程进行获取,根据运行路程,绘制第m运行线段,第m运行线段首端与第(m-1)运行线段尾端相连,在第m运行线段对应位置标记其对应的运行速度以及运行时间;
26、步骤s344:第一运行线段至第m运行线段围成的图像为目标物运行轨迹,将目标物运行轨迹输送至数据融合模块。
27、进一步地,所述步骤s4中,在对数据进行融合,具体步骤如下:
28、步骤s41:接收环境数据以及目标物控制参数,对第一个运行方向至第m个运行方向中的风力数值个数、风力数值持续时间以及风向角度进行判断获取;
29、步骤s42:基于风向角度,对风力方向与第一个方向之间的夹角α1进行获取,对夹角进行判断,若α1>90°,判断运行方向与风力方向相反,风力对运行方向起反向作用,若α1<90°,判断运行方向与风力方向相同,风力对运行方向起促进作用;
30、步骤s43:根据风向角度对应的风向数值结合夹角α1通过三角函数求取风力数值对运行方向相同或相反方向的影响风速,对每个风力数值的影响风速进行分别获取;
31、步骤s44:结合风力数值持续时间以及第一个运行方向中的运行速度、运行时间,对风力数值持续时间求和,使风力数值持续时间与运行时间相同,获取风力数值持续时间的个数;
32、步骤s45:对每个风力数值持续时间对应的风力数值进行获取,根据风力数值的个数,分别将对应风力数值的影响风速进行排列。
33、进一步地,在对数据进行融合还包括:
34、步骤s46:根据排列的影响风速结合k1个运行速度、k1个运行时间,对k1个运行时间对每个时间内的影响风速进行获取,通过获取的影响风速结合k1个运行速度进行数据融合,对第一个方向的实际运行速度进行获取;
35、步骤s47:若α1=90°,对此时的风力数值和目标物运行速度进行获取,对风力数值与目标物运行速度进行比较,若风力数值不大于目标物运行速度,则不对目标物进行处理,若风力数值大于目标物运行速度,则对目标物运行速度进行调节;
36、步骤s48:由此,分别对第二个运行方向至第m个运行方向中的数据进行融合,获取实际运行速度,对获取的m个方向的实际运行速度进行存储,存储的数据为实际运行参数。
37、进一步地,所述步骤s46在进行数据融合时,具体如下:
38、步骤s461:根据运行速度对应的影响风速生成影响排列表,对影响风速与运行速度间的角度进行判断,若角度为锐角,则对运行速度与影响风速进行求和进行数据融合,得到实际运行速度,根据实际运行速度,对无人机进行控制;
39、步骤s462:若角度为钝角,则对运行速度与影响风速进行求差进行数据融合,得到实际运行速度,若求差小于0,则对运行速度进行调节,使运行速度大于影响风速,所求差不小于0,根据实际运行速度,对无人机进行控制。
40、本发明的有益效果:
41、1.本发明通过无人机探测过程中的设定参数进行获取,根据设定参数对环境信息进行获取,对环境信息进行分析判断,得到环境数据,对环境数据与设定参数进行数据融合。
42、2.本发明在通过对无人机运行方向以及风力方向进行获取,根据运行方向的角度变化对风力方向与其之间的夹角进行获取,根据获取的夹角结合三角形的三角函数对影响风速进行获取,对无人机探测过程中进行准确的控制。
- 还没有人留言评论。精彩留言会获得点赞!