一种考虑振镜偏移的线激光自扫描系统标定方法及系统
本发明属于线激光视觉三维测量相关,更具体地,涉及一种考虑振镜偏移的线激光自扫描系统标定方法及系统。
背景技术:
1、线激光视觉三维测量通过激光线为被测物体构造特征,采用相机与线激光构成三角测量系统,完成对场景的三维测量,是一种主动式非接触测量,在工业领域应用广泛。通常有三种实现扫描的方式,一种是被测物体运动,一种是测量系统运动,最后一种是测量系统本身可以自扫描。基于轻量化的需求,通常以振镜作为自扫描机构,对入射激光平面进行反射,根据输入电压的不同改变旋转角度以实现系统的自扫描。振镜本身的厚度以及入射激光平面的偏移将直接影响出射激光平面的位置,通过加工和装配很难消除振镜偏移带来的误差,激光平面的位姿误差会引起最终的三维重构误差,很难适应高精度级的工业三维测量。
2、为此,许多学者针对线激光自扫描系统展开了深入的理论方法研究和创新结构设计。有的学者在结构设计上采用偏心的自扫描机构以实现反射面与旋转轴的重合,但会带来巨大的成本消耗,多数学者忽略了振镜偏移带来的上述两个影响因素,因此,亟需设计一种考虑振镜偏移的线激光自扫描系统精确标定方法,以减小振镜表面相对转轴的偏移以及振镜转轴相对入射激光平面的偏移带来的测量误差。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种考虑振镜偏移的线激光自扫描系统标定方法及系统,可以在充分考虑振镜表面相对转轴的偏移,振镜转轴相对入射激光平面的偏移两个因素下,精确标定振镜转轴方法、振镜转角和输入电压关系、三维相机系到二维振镜系的平移、振镜偏移参数以及入射激光平面和振镜表面的初始夹角。
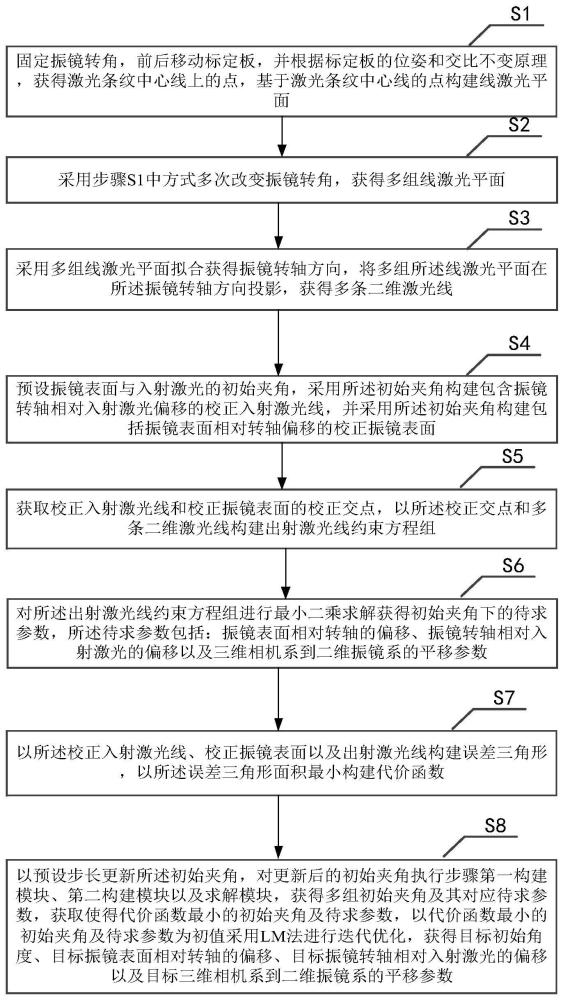
2、为实现上述目的,按照本发明的一个方面,提供了一种考虑振镜偏移的线激光自扫描系统标定方法,包括:s1:固定振镜转角,前后移动标定板,并根据标定板的位姿和交比不变原理,获得激光条纹中心线上的点,基于激光条纹中心线的点构建线激光平面;s2:采用步骤s1中方式多次改变振镜转角,获得多组线激光平面;s3:采用多组线激光平面拟合获得振镜转轴方向,将多组所述线激光平面在所述振镜转轴方向投影,获得多条二维激光线;s4:预设振镜表面与入射激光的初始夹角,采用所述初始夹角构建包含振镜转轴相对入射激光偏移的校正入射激光线,并采用所述初始夹角构建包括振镜表面相对转轴偏移的校正振镜表面;s5:获取校正入射激光线和校正振镜表面的校正交点,以所述校正交点和多条二维激光线构建出射激光线约束方程组;s6:对所述出射激光线约束方程组进行最小二乘求解获得初始夹角下的待求参数,所述待求参数包括:振镜表面相对转轴的偏移、振镜转轴相对入射激光的偏移以及三维相机系到二维振镜系的平移参数;s7:以所述校正入射激光线、校正振镜表面以及出射激光线构建误差三角形,以所述误差三角形面积最小构建代价函数;s8:以预设步长更新所述初始夹角,对更新后的初始夹角执行步骤s4~s6,获得多组初始夹角及其对应待求参数,获取使得代价函数最小的初始夹角及待求参数,以代价函数最小的初始夹角及待求参数为初值采用lm法进行迭代优化,获得目标初始角度、目标振镜表面相对转轴的偏移、目标振镜转轴相对入射激光的偏移以及目标三维相机系到二维振镜系的平移参数。
3、优选的,步骤s5中所述以所述校正交点和多条二维激光线构建出射激光线约束方程组,具体包括:s51:获取一二维激光线上的任意一点,将所述校正交点和所述任意一点相连得到连线;s52:以所述连线与所述二维激光的方向向量构建平行约束获得出射激光线约束方程;s53:采用步骤s51和s52方法依次获得多条二维激光线对应的多个出射激光线约束方程,进而获得所述出射激光线约束方程组。
4、优选的,步骤s1具体包括:获取三维空间中激光条纹中心线上每一点的三维坐标,基于激光条纹中心线上的三维坐标点采用最小二乘法拟合获得线激光平面。
5、优选的,步骤s3中所述采用多组线激光平面拟合获得振镜转轴方向具体为:振镜转轴的方向垂直于所述线激光平面的法向,构建垂直约束,基于所述垂直约束采用最小二乘法遍历所有线激光平面,将最小二乘解对应的方向作为振镜转轴的方向。
6、优选的,步骤s4中所述校正入射光线glin为:
7、glin=[ain bin d]t
8、其中,ain=-cos(2θ0-π/2),bin=sin(2θ0-π/2),θ0为初始夹角,glin为振镜坐标系{g}下的校正入射光线,d为振镜转轴相对入射激光的偏移。
9、优选的,步骤s4中所述校正振镜表面为:
10、glj=[aj bj r]t
11、其中,glj为振镜坐标系{g}下第j个转角对应的校正振镜表面方程,j=0,1,...,j-1,aj=-cos(θ0-jδθ/2),bj=sin(θ0-jδθ/2),θ0为初始夹角,δθ为第j个转角下线激光平面与第j+1个转角下线激光平面的夹角,r为振镜表面相对转轴的偏移。
12、优选的,步骤s5中出射激光线约束方程组为:
13、
14、其中,aj=bin/(ainbj-ajbin),bj=-bj/(ainbj-ajbin),cj=ain/(ajbin-ainbj),
15、dj=-aj/(ajbin-ainbj),vjx为在振镜系第j个转角下二维出射激光线方向的x分量,vjy为在振镜系第j个转角下二维出射激光线方向的y分量,qjx为在振镜系第j个转角下二维出射激光线上一点的x分量,qjy为在振镜系第j个转角下二维出射激光线上一点的y分量。
16、优选的,所述代价函数cost为:
17、
18、其中,j为振镜的第j个转角,sδej为第j个转角下校正入射激光线、校正振镜表面以及出射激光线构建的误差三角形的面积。
19、优选的,步骤s1中采用灰度重心法获得激光条纹中心线上的点。
20、本技术另一方面提供了一种实现上述考虑振镜偏移的线激光自扫描系统标定方法的系统,所述系统包括:第一获取模块:用于固定振镜转角,前后移动标定板,并根据标定板的位姿和交比不变原理,获得激光条纹中心线上的点,基于激光条纹中心线的点构建线激光平面;第二获取模块:用于采用第一获取模块中方式多次改变振镜转角,获得多组线激光平面;第三获取模块:用于采用多组线激光平面拟合获得振镜转轴方向,将多组所述线激光平面在所述振镜转轴方向投影,获得多条二维激光线;第一构建模块:用于预设振镜表面与入射激光的初始夹角,采用所述初始夹角构建包含振镜转轴相对入射激光偏移的校正入射激光线,并采用所述初始夹角构建包括振镜表面相对转轴偏移的校正振镜表面;第二构建模块:用于获取校正入射激光线和校正振镜表面的校正交点,以所述校正交点和多条二维激光线构建出射激光线约束方程组;求解模块:用于对所述出射激光线约束方程组进行最小二乘求解获得初始夹角下的待求参数,所述待求参数包括:振镜表面相对转轴的偏移、振镜转轴相对入射激光的偏移以及三维相机系到二维振镜系的平移参数;第三构建模块:用于以所述校正入射激光线、校正振镜表面以及出射激光线构建误差三角形,以所述误差三角形面积最小构建代价函数;迭代优化模块:以预设步长更新所述初始夹角,对更新后的初始夹角执行步骤第一构建模块、第二构建模块以及求解模块,获得多组初始夹角及其对应待求参数,获取使得代价函数最小的初始夹角及待求参数,以代价函数最小的初始夹角及待求参数为初值采用lm法进行迭代优化,,获得目标初始角度、目标振镜表面相对转轴的偏移、目标振镜转轴相对入射激光的偏移以及目标三维相机系到二维振镜系的平移参数。
21、总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的一种考虑振镜偏移的线激光自扫描系统标定方法及系统主要具有以下有益效果:
22、1.本技术多次改变振镜转角获得多组线激光平面,通过多组线激光平面拟合获得振镜转轴方向,并构建了相对入射激光偏移的校正入射激光线以及振镜表面相对转轴偏移的校正振镜表面,进而考虑振镜偏移的两个因素,相比现有的标定方法,基于相同的标定数据,有效实现了更多参数的标定。
23、2.采用搜索的方式确定了振镜表面和入射激光平面的初始夹角,巧妙地分离了系统求解的线性部分和非线性部分,将长度参数和角度参数分步求解,提出了仅通过出射激光平面即可反解初始夹角的方法。
24、3.基于误差三角形面积构造了代价函数,为初始角度的搜索提供了搜索依据,同时为迭代优化提供了目标函数,针对各参数的解析解进行同时优化,使得各参数的标定精度和最终的三维测量精度。
- 还没有人留言评论。精彩留言会获得点赞!