基于状态空间处理的动目标四维成像方法
本发明属于雷达信号处理领域,具体是一种基于状态空间处理的动目标四维成像方法,用于提高目标位置及运动参数的估计精度。
背景技术:
1、与传统的窄带/宽带信号相比,uwb(ultra wide band,超宽带)信号具有非常大的带宽。根据联邦通信委员会(fcc)的定义,uwb信号的绝对带宽至少为500mhz,或者分数(相对)带宽大于20%,由此,uwb信号可以提高目标运动参数的测量精度,以及确定目标的类别和类型。
2、为了在检测远程目标的同时保持足够的距离分辨率,需要增加平均发射功率,并利用极高的带宽发射信号。lfm(线性调频)波形可以利用大的脉冲宽度来增加平均发射功率,同时利用高带宽和脉冲压缩技术实现高距离分辨率。
3、基于子空间的空间谱估计方法可同时对空域中多目标来波方向进行估计,具有超分辨能力,是近年来目标测向及定位研究的热点,其中music算法、esprit算法以及高阶累积量的角度估计算法是经典算法。
4、雷达测角一般是三维空间对目标方位角和俯仰角的测量。mp算法是矩阵构造类的典型算法,可直接利用单次回波数据通过矩阵构造,实现相干信号和非相干信号的同时估计,然而其仅利用奇异值分解的左奇异向量或右奇异向量的信息。若能同时利用奇异值分解的左奇异向量和右奇异向量对目标角度估计,则可获得更高的测角精度。
技术实现思路
1、本发明基于子空间的空间谱估计方法精度较低甚至失效的问题,针对单元雷达多目标场景中相干/非相干信号同时入射的多目标超分辨测角场景,提出了一种基于状态空间处理的动目标四维成像方法,可在阵元数有限的条件下利用速度维、距离维的超分辨,实现多目标的高精度角度估计和目标速度或距离估计,提高了结果的精度。
2、具体步骤如下:
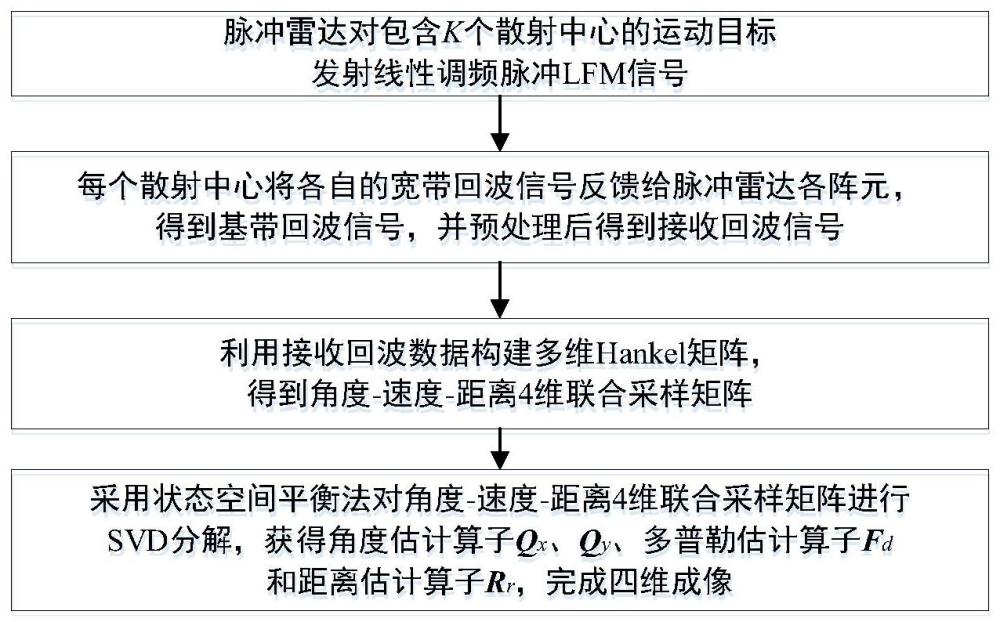
3、步骤一、脉冲雷达对包含k个散射中心的运动目标发射线性调频脉冲lfm信号;
4、线性调频脉冲lfm信号计算公式如下:
5、
6、其中,表示雷达发射的电磁波传播以发射时刻n2tprt为起点的时间;t为全时间,n2为慢时间的帧数:n2=0,1,…,n2-1,tprt为脉冲重复周期。是脉冲宽度;exp(j2πfct)为雷达发射线性调频信号的载频信号;μ是线性调频信号的调频系数,fc为线性调频信号的起始频率。
7、步骤二、每个散射中心将各自的宽带回波信号反馈给脉冲雷达,得到基带回波信号,并预处理后得到接收回波信号;
8、雷达将接收的k个散射中心回波信号,经过解调及数字下变频后,得到基带回波信号:
9、
10、其中,采用“停-走”模型,仅考虑脉间走动,即τr≈2(r0-vrn2tprt)/c。r0为目标的初始距离;vr为目标的径向速度,c为光速。
11、预处理是指:对基带回波信号去斜处理、混频、以采样周期ts进行离散化采样,将单个目标回波扩展到多目标多通道接收阵列,则接收回波表示为:
12、
13、其中,表示第nr个接收阵元坐标;为第nr个接收阵元对第k个散射中心的增益,n1为离散化采样序号,τref为参考时延;λ为线性调频信号的波长,ts为离散化采样周期,uk、vk为方向余弦:uk=cosφksinθk,vk=sinφksinθk,φk、θk分别为第k个散射中心的方位角和俯仰角;τr(k)为参考接收阵元接收到的单元雷达探测第k个目标时的空间延时,fdk为第k个散射中心的多普勒频率。
14、步骤三、利用接收回波数据构建多维hankel矩阵,得到角度-速度-距离4维联合采样矩阵;
15、具体过程为:
16、步骤301、将接收回波信号z(nr,n1,n2)以矩阵形式表达:
17、
18、其中为增益矩阵;qx、qy为角度估计算子的对角矩阵;rr为距离估计算子形成的对角矩阵;fd为多普勒频率估计算子形成的对角矩阵。
19、步骤302、将雷达采用间距为λ/2的nx×ny均匀面阵作为接收阵列,各阵元均匀分布,计算单元雷达每个阵元的坐标位置;
20、第nr(nr=nxny)个阵元坐标位置为:
21、
22、步骤303、利用单元雷达每个阵元的坐标位置,将接收回波信号的矩阵进一步化简为:
23、
24、步骤304、基于化简后的回波信号矩阵z(nx,ny,n1,n2),构建多维hankel矩阵:
25、首先,抽取nx维数据,以nxp的窗大小依次滑取回波方程z(nx,ny,n1,n2)的前nx-1个阵元接收数据,构造hankel矩阵以nxp的窗大小依次滑取回波方程z(nx,ny,n1,n2)的后nx-1个阵元接收数据,构造hankel矩阵
26、其次,抽取ny维数据,以nyp的窗大小分别滑取的ny-1个阵元接收数据,构造空间2维hankel矩阵h0(n1,n2)、h1(n1,n2)、h2(n1,n2):
27、然后,抽取n2维数据,以n2p的窗大小分别滑取h0(n1,n2)、h1(n1,n2)、h2(n1,n2)的n2-1个阵元接收数据,在多普勒频率维构造角度-速度联合hankel矩阵h′0(n1)、h′1(n1)、h′2(n1)、h′3(n1);
28、最后,抽取n1维数据,以n1p的窗大小分别滑取角度-速度联合hankel矩阵h′0(n1)、h′1(n1)、h′2(n1)、h′3(n1)的n1-1个阵元接收数据,在距离维构造角度-速度-距离联合矩阵h″0、h″1、h″2、h″3、h″4。
29、步骤四、采用状态空间平衡法对角度-速度-距离4维联合采样矩阵进行svd分解,获得角度估计算子qx、qy、多普勒估计算子fd和距离估计算子rr,完成四维成像;
30、具体为:
31、首先,将角度-速度-距离4维联合矩阵h″0、h″1、h″2、h″3、h″4分别矩阵化表示,得到:
32、h″0=o3c3
33、h″1=o3qxc3
34、h″2=o3qyc3
35、h″3=o3fdc3
36、h″4=o3rrc3
37、其中矩阵o3和矩阵c3为观察矩阵和控制矩阵。
38、然后,对联合矩阵h″0、h″1、h″2、h″3、h″4进行svd分解,获得角度估计算子qx、qy、多普勒估计算子fd和距离估计算子rr;
39、具体过程如下:
40、令λxk、λyk、λrk、λdk分别为估计算子qx、qy、rr、fd的对角线元素,则:
41、uk=∠(λxk)/π
42、vk=∠(λyk)/π
43、fdk=∠(λdk)/2πtprt
44、ηrk=∠(λrk)/π
45、其中,∠(·)为取相位操作。而uk=cosφksinθk、vk=sinφksinθk、ηrk=2μ(τ(k)-τref)ts、fdk=2vr/λ,进而可得:
46、
47、
48、
49、
50、其中,分别为第k个散射中心的方位角和俯仰角估计值,为第k个散射中心的径向速度速度估计值,为第k个散射中心的距离估计值。
51、至此完成实现了目标角度-速度-距离联合估计。
52、本发明的优点在于:
53、1)一种基于状态空间处理的动目标四维成像方法,相比于传统的fft方法,本发明更充分利用了回波信号的信息,从而显著的提高了精度。
54、2)一种基于状态空间处理的动目标四维成像方法,相比于传统的fft方法,本发明由回波信号互相关构建hankel矩阵并进行svd分解,得到的系数矩阵中第一个奇异值对应信号,其余奇异值对应噪声,实现了信号子空间和噪声子空间的切割,从而在显著提高精度的同时保证了系统对噪声具有较好的鲁棒性。
55、3)一种基于状态空间处理的动目标四维成像方法,相比于传统的pd雷达测速测距方法以及mimo测角方法,本发明使用回波信号互相关来估计目标参数,可实现角度、速度、距离信息的同时估计,且在阵元数有限的条件下利用速度维或距离维的超分辨,实现多目标的高精度角度估计和目标速度或距离估计,在目标速度维或距离维可分辨时具有更低的信噪比门限。
- 还没有人留言评论。精彩留言会获得点赞!