用于节油的预测性巡航地图降维处理方法、系统及介质与流程
本技术涉及地图降维处理,尤其涉及一种用于节油的预测性巡航地图降维处理方法、系统及介质。
背景技术:
1、根据商用车燃油成本占运营成本比例高现状,车辆节油控制非常重要。传统商用车巡航控制只考虑保持车速恒定,忽略道路和交通等信息的影响;进而导致车辆在遇到道路坡度起伏的工况下,为了维持车速恒定会在上坡时急加速、下坡时急减速等产生不节油的驾驶效果。
2、现阶段,预见性节油的方法有:一种重型混合动力商用车预见性能量管理方法,通过获取车辆前方道路信息采样点的坡度信息,确定车辆前方各道路区间坡度值;根据道路区间坡度值对道路区间进行合并,确定不同路段对应道路坡度;根据路段划分情况及各路段对应道路坡度,利用动态规划算法确定使车辆动力部件消耗能量最小的规划车速轨迹;根据规划车速轨迹及车辆前方未来道路路形变化,采用滚动优化算法确定混合动力部件能量分配规则,根据前方道路路形变化预先调整能量分配规则,实现混合动力预见性能量管理。
3、但是,上述节油控制方法未考虑路网重构阶段地图adas信息中两段距离间隔过大情况;未考虑地图路网重构分段过长情况,导致每段车辆不能按照匀加速或者匀减速运动计算;未考虑地图故障车辆未转弯情况下地图降维处理。
技术实现思路
1、针对现有技术的上述不足,本技术提供一种用于节油的预测性巡航地图降维处理方法、系统及介质,以解决现有的节油控制方法未考虑路网重构阶段地图adas信息中两段距离间隔过大情况;未考虑地图路网重构分段过长情况,导致每段车辆不能按照匀加速运动计算的问题;未考虑地图故障车辆未转弯情况下地图降维处理。
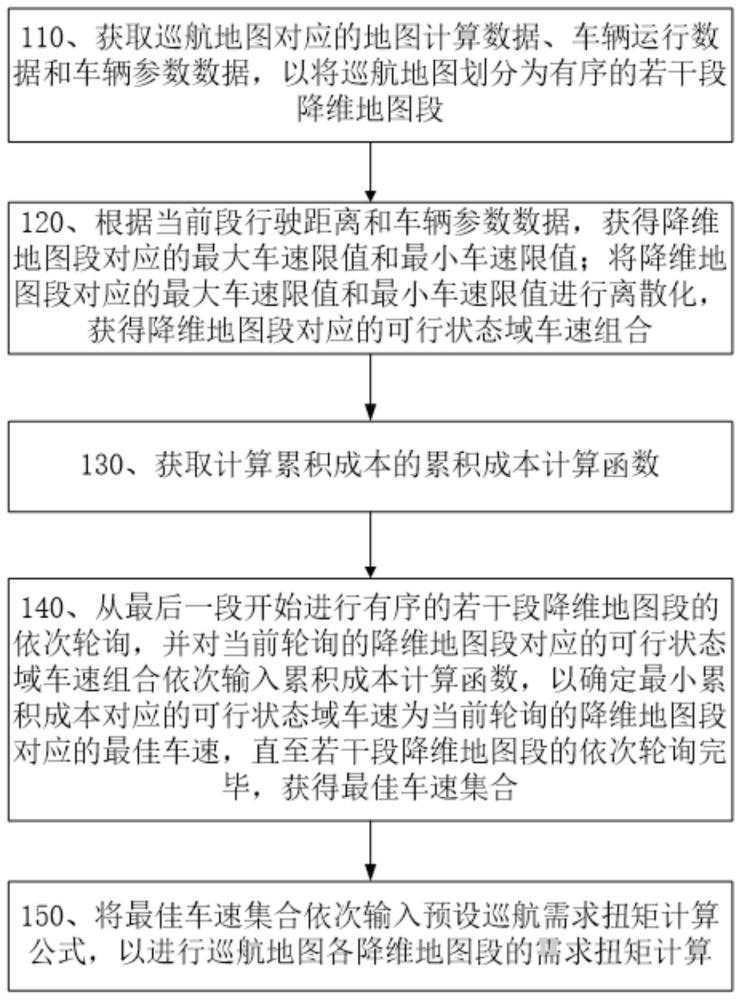
2、第一方面,本技术提供了一种用于节油的预测性巡航地图降维处理方法,方法包括:获取巡航地图对应的地图计算数据、车辆运行数据和车辆参数数据,以将巡航地图划分为有序的若干段降维地图段;其中,降维地图段包括当前段行驶距离、坡度和坡角;根据当前段行驶距离和车辆参数数据,获得降维地图段对应的最大车速限值和最小车速限值;将降维地图段对应的最大车速限值和最小车速限值进行离散化,获得降维地图段对应的可行状态域车速组合;其中,可行状态域车速组合由若干可行状态域车速组成;获取计算累积成本的累积成本计算函数;其中,累积成本计算函数为段成本计算函数的累加函数,且段成本计算函数的输入为当前降维地图段的可行状态域车速、上一降维地图段的可行状态域车速、当前段行驶距离、坡度和坡角;从最后一段开始进行有序的若干段降维地图段的依次轮询,并对当前轮询的降维地图段对应的可行状态域车速组合依次输入累积成本计算函数,以确定最小累积成本对应的可行状态域车速为当前轮询的降维地图段对应的最佳车速,直至若干段降维地图段的依次轮询完毕,获得最佳车速集合;将最佳车速集合依次输入预设巡航需求扭矩计算公式,以进行巡航地图各降维地图段的需求扭矩计算。
3、进一步地,地图计算数据至少包括巡航地图对应地图原始坡度数据、地图原始坡度偏移、当前车辆位置、网络重构状态和地图有效状态;车辆运行数据至少包括方向盘转角;获取巡航地图对应的地图计算数据、车辆运行数据和车辆参数数据,以将巡航地图划分为有序的若干段降维地图段,具体包括:获取巡航地图对应的地图计算数据中的地图原始坡度数据、地图原始坡度偏移、当前车辆位置、网络重构状态和地图有效状态;在确定地图有效状态为真时,确定网络重构状态是否为正处于路网重构状态;在为处于路网重构状态时,基于当前车辆位置和预设称行驶距离,将巡航地图分割为若干段降维地图段;在不为正处于路网重构状态时,基于当前车辆位置和预设称行驶距离,将巡航地图分割为若干段初始地图段,基于地图原始坡度数据,获取初始地图段对应的坡度数据,进而获得坡度修正系数,以通过坡度修正系数矫正初始地图段长度,进而获得降维地图段;在确定地图有效状态不为真时,获取方向盘转角和历史地图信息的有效性,以在方向盘转角在预设转角范围内且巡航地图对应的历史地图信息有效时,基于历史地图信息中的初始位置点和结束位置点,确定可标定行驶距离,进而通过可标定行驶距离将巡航地图切分为若干降维地图段;通过当前车辆位置对地图原始坡度数据插值后转换获得初始坡度;通过当前降维地图段位置对地图原始坡度偏移处坡度进行插值后转换为降维地图段坡度;将坡度除100后再取artan函数获得坡角。
4、进一步地,车辆参数数据至少包括当前车速、最大轮端扭矩、轮端拖拽扭矩、车辆质量、车轮半径;根据当前段行驶距离和车辆参数数据,获得降维地图段对应的最大车速限值和最小车速限值,具体包括:根据公式:,,计算最大车速限值和最小车速限值;其中,加速度是通过如下公式计算:。
5、进一步地,累积成本计算函数为:
6、;其中,j为总累积成本,k表示第k段降维地图段,k-1表示第k-1段降维地图段,k的取值范围为[n,1],n表示降维地图段的总段数,表示第k段降维地图段的可行状态域车速,第k-1段降维地图段的可行状态域车速,i表示第k段降维地图段对应的可行状态域车速组合中第i个可行状态域车速;j表示第k-1段降维地图段对应的可行状态域车速组合中第j个可行状态域车速;表示转移时燃油消耗,表示预设燃油消耗系数,表示转移时时间,表示预设行驶时间系数,表示转移时舒适度,表示预设舒适度系数;其中,、和由第k段降维地图段的可行状态域车速i、第k-1段降维地图段的可行状态域车速j、第k段行驶距离、第k段坡度和第k段坡角,通过车辆动力学公式计算获得。
7、进一步地,从最后一段开始进行有序的若干段降维地图段的依次轮询,并对当前轮询的降维地图段对应的可行状态域车速组合依次输入累积成本计算函数,以确定最小累积成本对应的可行状态域车速为当前轮询的降维地图段对应的最佳车速,直至若干段降维地图段的依次轮询完毕,获得最佳车速集合,具体包括:对有序的若干段降维地图段进行倒序轮询;获取当前轮询的降维地图段对应的可行状态域车速组合,将可行状态域车速组合中的可行状态域车速依次输入累积成本计算函数,以获得当前轮询的降维地图段当前选中的可行状态域车速对应的累积成本,完成当前轮询的降维地图段中全部可行状态域车速对应的累积成本,确定最小累积成本对应的可行状态域车速为当前轮询的降维地图段对应的最佳车速;其中,非当前轮询的降维地图段且未被轮询过的降维地图段采用可行状态域车速组合中的初始可行状态域车速作为参与累积成本计算函数计算的可行状态域车速;非当前轮询的降维地图段且被轮询过的降维地图段采用最佳车速作为参与累积成本计算函数计算的可行状态域车速。
8、第二方面,本技术提供了一种用于节油的预测性巡航地图降维处理系统,系统包括:划分模块,用于获取巡航地图对应的地图计算数据、车辆运行数据和车辆参数数据,以将巡航地图划分为有序的若干段降维地图段;其中,降维地图段包括当前段行驶距离;组合获取模块,用于根据当前段行驶距离和车辆参数数据,获得降维地图段对应的最大车速限值和最小车速限值;将降维地图段对应的最大车速限值和最小车速限值进行离散化,获得降维地图段对应的可行状态域车速组合;其中,可行状态域车速组合由若干可行状态域车速组成;函数获取模块,用于获取计算累积成本的累积成本计算函数;其中,累积成本计算函数为段成本计算函数的累加函数,且段成本计算函数的输入为当前降维地图段的可行状态域车速、上一降维地图段的可行状态域车速、当前段行驶距离、坡度和坡角;车速确定模块,用于从最后一段开始进行有序的若干段降维地图段的依次轮询,并对当前轮询的降维地图段对应的可行状态域车速组合依次输入累积成本计算函数,以确定最小累积成本对应的可行状态域车速为当前轮询的降维地图段对应的最佳车速,直至若干段降维地图段的依次轮询完毕,获得最佳车速集合;扭矩计算模块,用于将最佳车速集合依次输入预设巡航需求扭矩计算公式,以进行巡航地图各降维地图段的需求扭矩计算。
9、进一步地,地图计算数据至少包括巡航地图对应地图原始坡度数据、地图原始坡度偏移、当前车辆位置、网络重构状态和地图有效状态;车辆运行数据至少包括方向盘转角;划分模块包括划分单元,用于获取巡航地图对应的地图计算数据中的地图原始坡度数据、地图原始坡度偏移、当前车辆位置、网络重构状态和地图有效状态;在确定地图有效状态为真时,确定网络重构状态是否为正处于路网重构状态;在为正处于路网重构状态时,基于当前车辆位置和预设称行驶距离,将巡航地图分割为若干段降维地图段;在不为正处于路网重构状态时,基于当前车辆位置和预设称行驶距离,将巡航地图分割为若干段初始地图段,基于地图原始坡度数据,获取初始地图段对应的坡度数据,进而获得坡度修正系数,以通过坡度修正系数矫正初始地图段长度,进而获得降维地图段;在确定地图有效状态不为真时,获取方向盘转角和历史地图信息的有效性,以在方向盘转角在预设转角范围内且巡航地图对应的历史地图信息有效时,基于历史地图信息中的初始位置点和结束位置点,确定可标定行驶距离,进而通过可标定行驶距离将巡航地图切分为若干降维地图段;通过当前车辆位置对地图原始坡度数据插值后转换获得初始坡度;通过当前降维地图段位置对地图原始坡度偏移处坡度进行插值后转换为降维地图段坡度;将坡度除100后再取artan函数获得坡角。
10、进一步地,函数获取模块包括函数单元,用于存储累积成本计算函数;其中,累积成本计算函数为:;其中,j为总累积成本,k表示第k段降维地图段,k-1表示第k-1段降维地图段,k的取值范围为[n,1],n表示降维地图段的总段数,表示第k段降维地图段的可行状态域车速,第k-1段降维地图段的可行状态域车速,i表示第k段降维地图段对应的可行状态域车速组合中第i个可行状态域车速;j表示第k-1段降维地图段对应的可行状态域车速组合中第j个可行状态域车速;表示转移时燃油消耗,表示预设燃油消耗系数,表示转移时时间,表示预设行驶时间系数,表示转移时舒适度,表示预设舒适度系数;其中,、和由第k段降维地图段的可行状态域车速i、第k-1段降维地图段的可行状态域车速j、第k段行驶距离、第k段坡度和第k段坡角,通过车辆动力学公式计算获得。
11、进一步地,车速确定模块包括车速获得单元,用于对有序的若干段降维地图段进行倒序轮询;获取当前轮询的降维地图段对应的可行状态域车速组合,将可行状态域车速组合中的可行状态域车速依次输入累积成本计算函数,以获得当前轮询的降维地图段当前选中的可行状态域车速对应的累积成本,完成当前轮询的降维地图段中全部可行状态域车速对应的累积成本,确定最小累积成本对应的可行状态域车速为当前轮询的降维地图段对应的最佳车速;其中,非当前轮询的降维地图段且未被轮询过的降维地图段采用可行状态域车速组合中的初始可行状态域车速作为参与累积成本计算函数计算的可行状态域车速;非当前轮询的降维地图段且被轮询过的降维地图段采用最佳车速作为参与累积成本计算函数计算的可行状态域车速。
12、第三方面,本技术提供了一种非易失性计算机存储介质,其特征在于,其上存储有计算机指令,计算机指令在被执行时实现如上述任一项的一种用于节油的预测性巡航地图降维处理方法。
13、本领域技术人员能够理解的是,本技术至少具有如下有益效果:
14、本技术考虑路网重构阶段地图adas信息中两段距离间隔过大情况,通过获取巡航地图对应的地图计算数据、车辆运行数据和车辆参数数据,以将巡航地图划分为有序的若干段降维地图段,进行地图信息填充,提高地图预测精度。控制了巡航地图中各段的长度,使得每段能够按照匀加速运动计算。且本技术划分方案结合实际坡度变化等情况,这种自适应调节降维处理方法,提高了嵌入式软件实时性及优化效率。
15、另外,本技术根据当前段行驶距离和车辆参数数据,获得降维地图段对应的最大车速限值和最小车速限值,进而根据车速上下限,调整获得车辆在移动过程中不断变化车速,使其能够保持节油(累积成本最小)的最佳车速。
16、另外,针对地图故障车辆未转弯情况下地图处理,本技术基于历史地图信息中的初始位置点和结束位置点,确定可标定行驶距离,进而通过可标定行驶距离将巡航地图切分为若干降维地图段,实现了短期无地图情况下预测地图处理。
- 还没有人留言评论。精彩留言会获得点赞!