一种剩余时差校正的微地震定位方法及相关设备
本发明涉及微地震监测,尤其涉及一种剩余时差校正的微地震定位方法、系统、终端及计算机可读存储介质。
背景技术:
1、微地震事件的精确定位对于非常规油气水力压裂评估具有重要意义。微地震监测主要有地面和井中监测两种观测方式。由于布设更方便经济,地面微地震监测受到越来越广泛的应用。微地震监测的核心技术是微地震定位,常规微地震定位方法主要包括基于微地震事件p波和s波到时的走时反演方法以及基于波形的绕射叠加类定位方法。对于地面微地震监测而言,由于微地震事件的发生位置距离检波器较远,接收到的事件能量较弱信噪比较低,因此传统基于到时拾取的定位方法技术难以应用,基于波形的绕射叠加定位方法技术逐渐成为主流。
2、对于绕射叠加定位方法而言,速度模型是影响定位结果最重要的因素之一,实际应用中,速度模型通常是基于测井数据得到一个粗糙的一维速度模型,然后如果有射孔事件可利用其已知发震位置对速度模型进行校正。使用该速度模型进行绕射叠加定位往往会存在一定误差,特别是对于起伏地表或近地表速度横向变化较大的情况,定位结果可能不太理想,导致微地震监测给出的裂缝长度及范围往往比实际要大。对于起伏地表地面微地震监测,由于精确的近地表及下覆地层速度模型难以建立,现有技术一般先对原始采集数据进行简单的高程校正后再利用一维速度模型进行微地震定位,由于静校正及速度模型误差,影响低信噪比及弱信号事件的检测,同时导致定位结果不确定性大精度低,降低了实际微地震监测的有效性。
3、因此,现有技术还有待于改进和发展。
技术实现思路
1、本发明的主要目的在于提供一种剩余时差校正的微地震定位方法、系统、终端及计算机可读存储介质,旨在解决现有技术中先对原始采集数据进行简单的高程校正后再利用一维速度模型进行微地震定位,由于静校正及速度模型误差,影响低信噪比及弱信号事件的检测,同时导致定位结果不确定性大精度低,降低了实际微地震监测的有效性的问题。
2、为实现上述目的,本发明提供一种剩余时差校正的微地震定位方法,所述剩余时差校正的微地震定位方法包括如下步骤:
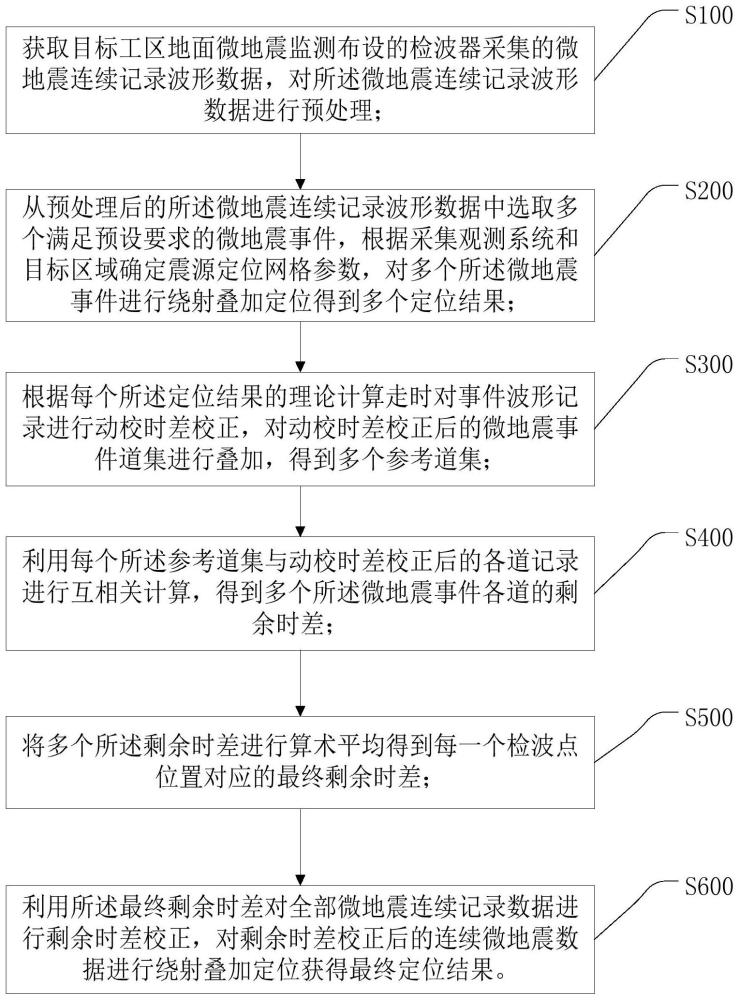
3、获取目标工区地面微地震监测布设的检波器采集的微地震连续记录波形数据,对所述微地震连续记录波形数据进行预处理;
4、从预处理后的所述微地震连续记录波形数据中选取多个满足预设要求的微地震事件,根据采集观测系统和目标区域确定震源定位网格参数,对多个所述微地震事件进行绕射叠加定位得到多个定位结果;
5、根据每个所述定位结果的理论计算走时对事件波形记录进行动校时差校正,对动校时差校正后的微地震事件道集进行叠加,得到多个参考道集;
6、利用每个所述参考道集与动校时差校正后的各道记录进行互相关计算,得到多个所述微地震事件各道的剩余时差;
7、将多个所述剩余时差进行算术平均得到每一个检波点位置对应的最终剩余时差;
8、利用所述最终剩余时差对全部微地震连续记录数据进行剩余时差校正,对剩余时差校正后的连续微地震数据进行绕射叠加定位获得最终定位结果。
9、可选地,所述的剩余时差校正的微地震定位方法,其中,所述预处理包括:去坏道、带通滤波和高程静校正;
10、所述去坏道用于去除由于检波器本身故障或耦合问题导致记录到的异常数据;所述带通滤波用于去噪以提高数据的信噪比;所述高程静校正用于提高微地震事件波形的连续性。
11、可选地,所述的剩余时差校正的微地震定位方法,其中,所述根据采集观测系统和目标区域确定震源定位网格参数,对多个所述微地震事件进行绕射叠加定位得到多个定位结果,具体包括:
12、对于检波器接收到的任一微地震事件,理论到时表示为:
13、τij=τ0j+τmovej+δτij; (1)
14、其中,i表示检波器的道号,j表示微地震事件标号,τ0表示微地震事件的发震时刻,τmove表示微地震事件地震波传播的近似旅行时刻,δτ表示剩余时差;
15、若不考虑剩余时差的影响,利用速度模型计算理论走时对微地震事件进行绕射叠加定位,定位成像结果表示为:
16、
17、其中,(x,y,z)表示震源定位的空间网格位置,n表示记录数据总的道数,ai表示第i道数据极性校正后的事件波形振幅函数;
18、对定位成像结果拾取能量最大值的位置得到相应的定位结果,表示为:
19、(x0,y0,z0)=argmax[s(x,y,z,τ0)]; (3)
20、其中,(x0,y0,z0)表示微地震事件定位确定的震源坐标位置。
21、可选地,所述的剩余时差校正的微地震定位方法,其中,所述根据每个所述定位结果的理论计算走时对事件波形记录进行动校时差校正,对动校时差校正后的微地震事件道集进行叠加,得到多个参考道集,具体包括:
22、根据定位结果和速度模型计算得到各道的理论旅行时,动校时差校正后微地震事件各道的到时表示为:
23、tij=τij-τmovej=τ0j+δτij; (4)
24、对动校时差校正后的道集进行叠加,叠加道集的到时表示为:
25、
26、若剩余时差满足高斯分布,则公式(5)中右边第二项趋于零,则叠加参考道集的到时近似等于发震时刻τ0。
27、可选地,所述的剩余时差校正的微地震定位方法,其中,所述利用每个所述参考道集与动校时差校正后的各道记录进行互相关计算,得到多个所述微地震事件各道的剩余时差,具体包括:
28、利用叠加参考道集与动校时差校正道集各道进行互相关计算得到各道的剩余时差,表示为:
29、δτij=c[sj(t)*gji(t)]; (6)
30、其中,s表示参考道,g表示动校时差校正道,c[]表示互相关计算。
31、可选地,所述的剩余时差校正的微地震定位方法,其中,所述将多个所述剩余时差进行算术平均得到每一个检波点位置对应的最终剩余时差,具体包括:
32、对所有计算得到的微地震事件相应的剩余时差进行算术平均得到相应检波点各道的最终剩余时差,表示为:
33、
34、其中,m表示选取的微地震事件个数。
35、可选地,所述的剩余时差校正的微地震定位方法,其中,所述检波器包括单分量检波器。
36、此外,为实现上述目的,本发明还提供一种剩余时差校正的微地震定位系统,其中,所述剩余时差校正的微地震定位系统包括:
37、数据获取模块,用于获取目标工区地面微地震监测布设的检波器采集的微地震连续记录波形数据,对所述微地震连续记录波形数据进行预处理;
38、叠加定位模块,用于从预处理后的所述微地震连续记录波形数据中选取多个满足预设要求的微地震事件,根据采集观测系统和目标区域确定震源定位网格参数,对多个所述微地震事件进行绕射叠加定位得到多个定位结果;
39、校正叠加模块,用于根据每个所述定位结果的理论计算走时对事件波形记录进行动校时差校正,对动校时差校正后的微地震事件道集进行叠加,得到多个参考道集;
40、互相关计算模块,用于利用每个所述参考道集与动校时差校正后的各道记录进行互相关计算,得到多个所述微地震事件各道的剩余时差;
41、算术平均模块,用于将多个所述剩余时差进行算术平均得到每一个检波点位置对应的最终剩余时差;
42、校正定位模块,用于利用所述最终剩余时差对全部微地震连续记录数据进行剩余时差校正,对剩余时差校正后的连续微地震数据进行绕射叠加定位获得最终定位结果。
43、此外,为实现上述目的,本发明还提供一种终端,其中,所述终端包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的剩余时差校正的微地震定位程序,所述剩余时差校正的微地震定位程序被所述处理器执行时实现如上所述的剩余时差校正的微地震定位方法的步骤。
44、此外,为实现上述目的,本发明还提供一种计算机可读存储介质,其中,所述计算机可读存储介质存储有剩余时差校正的微地震定位程序,所述剩余时差校正的微地震定位程序被处理器执行时实现如上所述的剩余时差校正的微地震定位方法的步骤。
45、本发明中,获取目标工区地面微地震监测布设的检波器采集的微地震连续记录波形数据,对所述微地震连续记录波形数据进行预处理;从预处理后的所述微地震连续记录波形数据中选取多个满足预设要求的微地震事件,根据采集观测系统和目标区域确定震源定位网格参数,对多个所述微地震事件进行绕射叠加定位得到多个定位结果;根据每个所述定位结果的理论计算走时对事件波形记录进行动校时差校正,对动校时差校正后的微地震事件道集进行叠加,得到多个参考道集;利用每个所述参考道集与动校时差校正后的各道记录进行互相关计算,得到多个所述微地震事件各道的剩余时差;将多个所述剩余时差进行算术平均得到每一个检波点位置对应的最终剩余时差;利用所述最终剩余时差对全部微地震连续记录数据进行剩余时差校正,对剩余时差校正后的连续微地震数据进行绕射叠加定位获得最终定位结果。本发明通过少量高信噪比事件采用互相关计算剩余时差,然后对每道数据进行时差校正再进行绕射叠加定位,可较好解决静校正和速度模型误差的影响,可以有效提高低信噪比微地震的检测效果和定位精度,提高地面微地震监测的有效性。
- 还没有人留言评论。精彩留言会获得点赞!