一种补偿基阵不一致性的三维成像方法及相关装置与流程
本发明涉及声呐三维成像,尤其涉及一种补偿基阵不一致性的三维成像方法及相关装置。
背景技术:
1、接收换能器基阵是三维成像声呐的核心部件,现有技术中,接收换能器基阵的不一致性是引起图像质量降低的主要因素之一,在成像声呐的波束形成算法中补偿接收换能器基阵的不一致性是提高声图像质量的重要方法。
2、1)基阵不一致性引起成像质量下降,是需要补偿基阵不一致性的技术背景
3、在成像声呐领域,技术方面评价成像质量主要有两项指标:波束方向图的主瓣宽度、旁瓣高度。主瓣宽度越窄、旁瓣高度越低则成像质量越好。
4、接收换能器基阵的不一致性会给系统的输入阵列信号引入幅相误差,幅相误差会对主瓣宽度的影响较小,但对旁瓣高度的影响较大,会使旁瓣高度增加,从而使图像噪声增多。
5、2)基阵不一致性引入的幅相误差使旁瓣高度升高。
6、图1为现有技术中的三维成像声呐的接收面阵坐标系。如图1所示,理想状态下的三维成像声呐波束形成可以用一下公式表示:
7、表示垂直平面回波的波平面而指向声源的单位矢量;
8、表示波束方向的单位矢量rmn=(xm,yn);1≤m≤m;1≤n≤n表示坐标为(m,n)的阵元在xoy平面内的坐标;
9、λ为波长wmn表示坐标为(m,n)的阵元的权值。
10、理想状态下,三维成像声呐的接收换能器基阵上的每一个阵元均位于xoy平面内,相邻阵元之间的间距为相等的常数,此时波束方向图为:
11、
12、波束功率为:
13、p0(w,ux,uy)=f0(w,ux,uy)f0*(w,ux,uy)
14、当系统存在阵元失效、幅相误差时,波束方向图为:
15、
16、波束功率为
17、
18、fmn为描述阵元失效的因子其中pf为阵元的失效概率。
19、δmn,分别为(m,n)阵元的幅度误差,相位误差,为正态分布。满足:
20、
21、
22、
23、由(1)、(2)式可知,存在幅相误差时:
24、e{f(w,ux,uy)}×(1-pf)φ(1)f0(w,ux,uy)
25、其中:
26、
27、
28、则考察波束的功率:
29、
30、则有:
31、e{p(w,0,0)}≈(1-pf)2φ2(1)p0(w,0,0)
32、
33、其中
34、
35、当每一个阵元权重取1,且没有阵元失效时有:
36、
37、上式的物理意义:当存在幅相误差时平均旁瓣功率相比没有幅相误差时提高了:
38、
39、由此可见,幅相误差越大,旁瓣幅度越大,图像噪声越多,因此需要尽可能在波束形成过程中补偿基阵不一致性,从而降低引入的幅相误差,提高图像的信噪比。
技术实现思路
1、本发明实施例提供了一种补偿基阵不一致性的三维成像方法及相关装置,按照实际阵元坐标位置进行波束形成,补偿了基阵阵元位置误差,又考虑了不同温度、不同增益下的不同阵元幅相误差,更好地补偿了基阵的不一致性。
2、第一方面,本发明实施例提供一种补偿基阵不一致性的三维成像方法,包括:
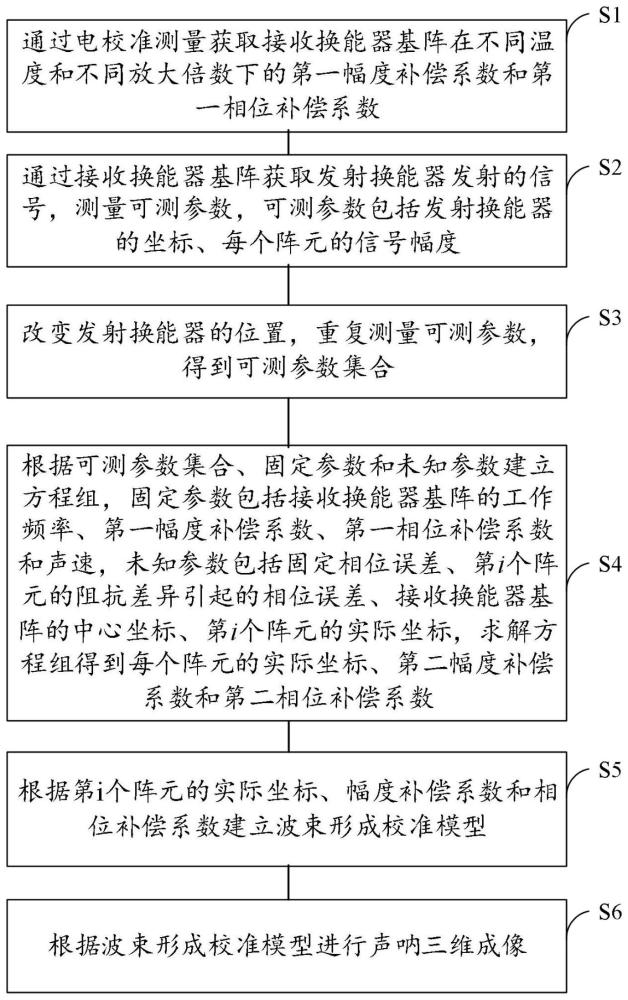
3、s1、通过电校准测量获取接收换能器基阵在不同温度和不同放大倍数下的第一幅度补偿系数和第一相位补偿系数;
4、s2、通过接收换能器基阵获取发射换能器发射的信号,测量可测参数,可测参数包括发射换能器的坐标、每个阵元的信号幅度;
5、s3、改变发射换能器的位置,重复测量可测参数,得到可测参数集合;
6、s4、根据可测参数集合、固定参数和未知参数建立方程组,固定参数包括接收换能器基阵的工作频率、第一幅度补偿系数、第一相位补偿系数和声速,未知参数包括固定相位误差、第i个阵元的阻抗差异引起的相位误差、接收换能器基阵的中心坐标、第i个阵元的实际坐标,求解方程组得到每个阵元的实际坐标、第二幅度补偿系数和第二相位补偿系数;
7、s5、根据第i个阵元的实际坐标、幅度补偿系数和相位补偿系数建立波束形成校准模型;
8、s6、根据波束形成校准模型进行声呐三维成像。
9、结合第一方面,在本技术实施例的一种实现方式中,步骤s5具体包括:
10、构建波束形成校准模型为:
11、
12、其中,ai(g,t)为第i个阵元的第二幅度补偿系数,si为第i个阵元输出的解调数据,为第i个阵元的第二相位补偿系数,fomit为接收换能器基阵的工作频率,r为目标与坐标原点之间的距离,vi为第i个阵元的坐标,q0为当前波束方向,c为声速,m为第i个阵元的列号,n为第i个阵元的行号,n为面阵型接收换能器基阵中阵元每行、每列的数量。
13、结合第一方面,在本技术实施例的一种实现方式中,步骤s4包括:
14、s401、根据可测参数集合、固定参数和未知参数建立第一方程组,第一方程组包括:
15、
16、其中,ψ0为固定相位误差;δsi0为第i个阵元的阻抗差异引起的相位误差,fomit为工作频率,|vi-vt|表示发射换能器与第i个阵元之间的距离,(xr0,yr0,zr0)表示接收换能器基阵的中心坐标,(xrm,yrn,zrmn)为第i个阵元的实际坐标,(xt0,yt0,zt0)为发射换能器的坐标,asi0是阵元灵敏度差异引入的幅度误差,ai0为第i个阵元的信号幅度,a10为第1个阵元的信号幅度;
17、s402、重复步骤s3和步骤s401若干次,获得多个第一方程组;
18、s403、联立求解多个第一方程组,得到第i个阵元的实际坐标(xrm,yrn,zrmn),第i个阵元的阻抗差异引起的相位误差δsi0,幅度误差补偿系数asi,其中,幅度误差补偿系数asi为阵元灵敏度差异引入的幅度误差asi0的平均值。
19、s404、根据第一幅度补偿系数、第一相位补偿系数和步骤s403得到的参数确定每个阵元的实际坐标、第二幅度补偿系数和第二相位补偿系数。
20、结合第一方面,在本技术实施例的一种实现方式中,步骤s404包括:
21、根据第二方程组确定每个阵元的实际坐标、幅度补偿系数和相位补偿系数,第二方程组包括:
22、
23、其中,ai(g,t)为第二幅度补偿系数,asi为幅度误差补偿系数,aai(g,t)为第一幅度补偿系数,为第二相位补偿系数,为第一相位补偿系数,δsi0为第i个阵元的阻抗差异引起的相位误差,vi为第i个阵元的坐标。
24、结合第一方面,在本技术实施例的一种实现方式中,步骤s2之前包括:
25、将接收换能器基阵和发射换能器安装在消声水池的滑轨上;
26、步骤s2具体包括:
27、通过消声水池上的标尺获取所述发射换能器的第一坐标,通过航车滑轨上的标尺获取所述发射换能器的第二坐标,通过航车升降装置的标尺获取所述发射换能器的第三坐标。
28、结合第一方面,在本技术实施例的一种实现方式中,步骤s1具体包括:
29、s101、将接收换能器基阵放入高低温箱,设置温度t的初始温度,并通过上位机设置接收换能器基阵的初始放大倍数g,然后记录接收换能器基阵解调输出信号的幅度和相位;
30、s102、改变温度t和放大倍数g,然后记录接收换能器基阵解调输出信号的幅度和相位,从而获取到接收换能器基阵在不同温度和放大倍数下的输出信号幅度和相位;
31、s103、根据接收换能器基阵在不同温度和放大倍数下的输出信号幅度和相位确定接收换能器基阵的第一幅度补偿系数和第一相位补偿系数。
32、结合第一方面,在本技术实施例的一种实现方式中,步骤s103具体包括:
33、通过第一幅度补偿系数公式确定第一幅度补偿系数,第一幅度补偿系数公式为:
34、
35、其中,aai(g,t)为第一幅度补偿系数,aai(g,t)为第i个阵元在温度g和放大倍数t下的幅度;
36、通过第一相位补偿系数公式确定第一相位补偿系数,第一相位补偿系数公式为:
37、
38、其中,为第一相位补偿系数,为第i个阵元在温度g和放大倍数t下的相位。
39、第二方面,本技术实施例提供一种补偿基阵不一致性的三维成像装置,包括:
40、电校准模块,用于通过电校准测量获取接收换能器基阵在不同温度和不同放大倍数下的第一幅度补偿系数和第一相位补偿系数;
41、处理模块,用于通过接收换能器基阵获取发射换能器发射的信号,测量可测参数,可测参数包括发射换能器的坐标、每个阵元的信号幅度;
42、处理模块,还用于改变发射换能器的位置,重复测量可测参数,得到可测参数集合;
43、处理模块,还用于根据可测参数集合、固定参数和未知参数建立方程组,固定参数包括接收换能器基阵的工作频率、补偿系数和声速,未知参数包括固定相位误差、第i个阵元的阻抗差异引起的相位误差、接收换能器基阵的中心坐标、第i个阵元的实际坐标,求解方程组得到每个阵元的实际坐标、第二幅度补偿系数和第二相位补偿系数;
44、处理模块,还用于根据第i个阵元的实际坐标、幅度补偿系数和相位补偿系数建立波束形成校准模型;
45、成像模块,用于根据波束形成校准模型进行声呐三维成像。
46、第三方面,本技术实施例提供一种数据处理设备,该数据处理设备包括一个以上处理器、存储器以及通信接口;
47、存储器中存储有程序代码;
48、处理器执行存储器中程序代码时实现上述第一方面的方法。
49、第四方面,本技术实施例提供一种计算机可读存储介质,当指令在计算机装置上运行时,使得计算机装置执行如第一方面的方法。
50、从以上技术方案可以看出,本发明实施例具有以下优点:
51、本技术实施例提供了一种补偿基阵不一致性的三维成像方法及相关装置,在求解过程和校准模型均考虑计算了每个阵元的实际坐标,又考虑了接收换能器基阵在不同温度和不同放大倍数下的第一幅度补偿系数和第一相位补偿系数,因此本技术实施例提供的补偿基阵不一致性的三维成像方法按照实际阵元坐标位置进行波束形成,补偿了基阵阵元位置误差,又考虑了不同温度、不同增益下的不同阵元幅相误差,更好地补偿了基阵的不一致性,从而降低了引入的幅相误差,提高了图像的信噪比。
- 还没有人留言评论。精彩留言会获得点赞!