一种车载单频GNSS/MEMS组合系统序列选星抗差定位方法及系统
本公开属于车辆导航定位领域,具体涉及一种车载单频gnss/mems组合系统序列选星抗差定位方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本公开相关的背景技术信息,不必然构成在先技术。
2、随着全球导航卫星系统(global navigation satellite system,gnss)的发展,多模gnss定位技术能够克服单一卫星系统在城市复杂场景定位不可靠问题,单频gnss接收机由于其价格低廉并且依然能获得高精度的位置信息,在车载导航、智能驾驶、智慧交通等新一代信息技术领域中发挥着重要作用。但是城市存在高大建筑物、高架桥、城市环岛、林荫道路和隧道等复杂遮蔽/半遮蔽场景,卫星信号衰减甚至完全不可视,导致gnss技术无法获得连续、可靠和高精度的位置信息。随着微机电系统(micro electro mechanicalsystems,mems)的快速发展,以消费级mimu(mems inertial measurement unit)器件为核心的惯性导航系统(inertial navigation system,ins)与gnss进行融合可以发挥各自系统的优点,在复杂的城市环境下获得连续的位置信息。ins预测的短时高精度信息能够辅助gnss模糊度的可靠固定,但是在复杂场景下gnss观测值受到外界环境的干扰严重,观测值质量严重降低,即使ins辅助也无法保证所有观测值的模糊度固定,导致用户无法获得连续、可靠和高精度的位置信息。而单频gnss数据由于无法进行观测值之间的组合,在复杂环境下模糊度更加难以可靠固定。选择部分观测值质量较高的模糊度进行固定是当前研究的有效方法,该方法的关键是高质量观测模糊度子集的选择。
技术实现思路
1、为了解决上述问题,本公开提出了一种车载单频gnss/mems组合系统序列选星抗差定位方法及系统,利用先验的高度角信息和载体平面坐标系下的方位信息以及后验残差信息进行模糊度子集优选,有效降低低质量观测值对模糊度固定性能的影响,提高复杂场景下模糊度固定性能,进而保障车载系统在复杂城市场景定位性能,为用户在城市复杂环境下提供高可靠、高可用和高精度位置信息。
2、为了实现上述目的,本公开采用如下技术方案:
3、本公开第一方面提供了一种车载单频gnss/mems组合系统序列选星抗差定位方法,包括以下步骤:
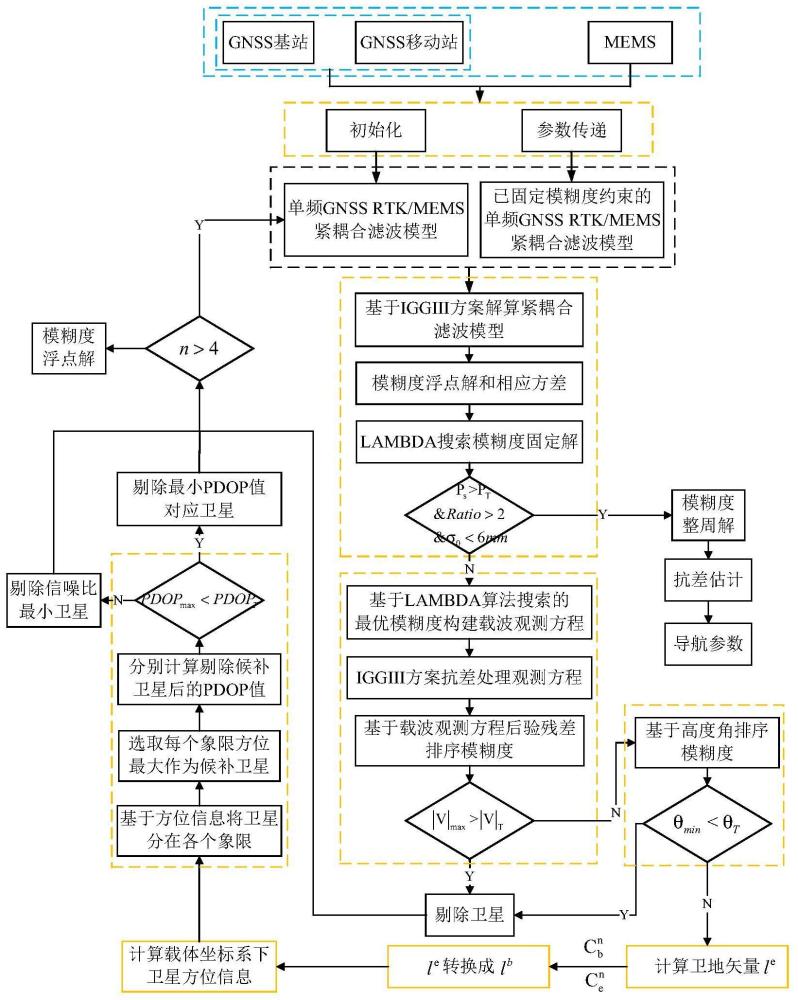
4、s1构建ins辅助的单频gnss rtk/mems紧耦合观测方程;
5、s2对紧耦合观测方程进行抗差滤波解算得到模糊度浮点解和相应方差-协方差矩阵,搜索模糊度固定解,并确认模糊度固定解;
6、s3当模糊度固定确认不通过时,利用后验残差信息和先验的高度角信息以及载体平面坐标系下方位信息进行模糊度选星,剔除低质量卫星;
7、s4基于剔除低质量卫星后剩余的卫星构建ins辅助单频gnss/ins紧耦合观测方程,执行步骤s2判断模糊度参数是否固定,当模糊度无法固定,并且剩余的观测方程数目大于设置的阈值时,循环执行步骤s2-s3,当剩余观测方程数目小于设置的阈值时,输出浮点解;
8、s5将固定的模糊度固定解回代入载波相位观测方程,使用抗差估计算法进行位置参数解算,进行车辆定位。
9、优选的,步骤s3的具体步骤为:
10、s31将步骤s2中搜索的最优模糊度回代入载波相位观测值方程,利用抗差估计算法对观测方程进行解算;然后将计算的后验残差信息按绝对值大小进行排序,当残差最大值大于设置的阈值时,剔除残差最大值对应的卫星,否则执行步骤s32;
11、s32当最大值残差小于设置的阈值,基于高度角信息进行排序,选择高度角最低的卫星,如果高度角小于设置的阈值,剔除高度角最低的卫星,否则执行步骤s33;
12、s33当高度角最小值大于设置的阈值时,利用卫星和载体的卫地矢量计算卫星在载体平面坐标系下的方位信息,根据方位信息将所有卫星分在不同象限内,分别选择不同象限内最大方位信息所对应的卫星作为候补要剔除的卫星;
13、s34循环剔除步骤s33选择的不同象限最大方位信息所对应的卫星,然后基于剩余卫星计算pdop,将最大pdop值和设置阈值进行比较,如果小于设置阈值,剔除pdop最小所对应的候选值卫星,否则剔除候补卫星中具有最小信噪比的卫星。
14、优选的,步骤s1的具体步骤为:
15、将模糊度解算的技术流程分为初始化和参数传递两个过程,初始化过程为对该历元模糊度重新进行解算的过程,根据单频gnss接收到的伪距和载波相位观测值,以及ins预测的高精度位置信息,建立ins辅助的单频gnss rtk/mems紧耦合观测方程;
16、参数传递过程为将上一历元已固定的模糊度作为附加约束条件进行当前历元模糊度参数解算的过程,构建已固定模糊度约束的ins辅助的单频gnss rtk/mems紧耦合观测方程。
17、优选的,步骤s2中对紧耦合观测方程进行抗差滤波解算得到模糊度浮点解和相应方差-协方差矩阵具体为:
18、求取伪距观测值、载波相位观测值、模糊度和ins预测信息的权矩阵,基于权矩阵和抗差因子得到等价权矩阵,利用等价权矩阵对紧耦合观测方程进行抗差估计解算,经过抗差估计解算后得到模糊度浮点解和相应的方差-协方差矩阵。
19、优选的,在进行抗差估计解算时针对不同类型观测值应当构建不同的抗差因子,对伪距和载波相位观测值进行分类计算相应的抗差因子,利用不同类型观测值的抗差因子与权矩阵相乘得到经过抗差处理后的等价权矩阵。
20、优选的,步骤s2中搜索模糊度固定解,并确认模糊度固定解具体为:
21、使用单位权中误差对模糊度固定解进行确认,具体公式为:
22、
23、式中,v表示将固定的模糊度回代入载波观测方程后的残差矩阵,p为权矩阵,n为模糊度数目,n为大于3的整数;
24、利用模糊度固定成功率、ratio值以及单位权中误差小于设定阈值作为模糊度最终通过检验的判断条件。
25、优选的,利用先验的高度角信息进行模糊度选星具体为:
26、将sins预测的高精度位置信息作为车载系统在地心地固坐标系下的三维坐标,计算其与卫星在地心地固坐标系下三维坐标构成的卫地矢量;
27、然后利用sins预测的载体系与当地导航坐标系的方向余弦矩阵将卫地矢量转到载体坐标系下;
28、根据载体坐标系下的卫地矢量计算卫星在载体平面坐标系的方位信息;
29、将载体坐标系xb和yb轴所在平面定义为载体平面坐标系,将载体平面坐标系按顺时针方向分为四个象限,根据卫地矢量在xb和yb轴上分量的正负号判断卫星所在的载体平面坐标系下的象限,将卫星分在相应的象限内;
30、对各个象限卫星的方位信息进行排序,选取各个象限最大方位信息所对应的卫星作为要剔除的候选。
31、本公开第二方面提供了一种车载单频gnss/mems组合系统序列选星抗差定位系统,包括:
32、方程构建模块,被配置为:构建ins辅助的单频gnss rtk/mems紧耦合观测方程;
33、模糊度确认模块,被配置为:对紧耦合观测方程进行抗差滤波解算得到模糊度浮点解和相应方差-协方差矩阵,搜索模糊度固定解,并确认模糊度固定解;
34、模糊度选星模块,被配置为:当模糊度固定确认不通过时,利用后验残差信息和先验的高度角信息以及载体平面坐标系下方位信息进行模糊度选星,剔除低质量卫星;
35、参数结算模块,被配置为:基于剔除低质量卫星后剩余的卫星构建ins辅助单频gnss/ins紧耦合观测方程,执行步骤s2判断模糊度参数是否固定,当模糊度无法固定,并且剩余的观测方程数目大于设置的阈值时,循环执行步骤s2-s3,当剩余观测方程数目小于设置的阈值时,输出浮点解;
36、将固定的模糊度固定解回代入载波相位观测方程,使用抗差估计算法进行位置参数解算,进行车辆定位。
37、本公开第三方面提供了一种介质,其上存储有程序,该程序被处理器执行时实现本公开第一方面所述的车载单频gnss/mems组合系统序列选星抗差定位方法中的步骤。
38、本公开第四方面提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时实现本公开第一方面所述的车载单频gnss/mems组合系统序列选星抗差定位方法中的步骤。
39、与现有技术相比,本公开的有益效果为:
40、1.本公开基于先验的高度角信息和载体平面坐标系下方位信息以及后验残差信息构建的部分模糊度选星策略,充分考虑了卫星的观测值质量信息和载体的实际空间场景信息,基于此信息的序列选星策略能够较好的剔除受到外界环境影响的低质量卫星,改善单频gnss的模糊度固定性能,为用户提供高性能的定位结果。同时将不同卫星在载体平面坐标系下分为不同象限,基于pdop信息进行选星,很好的顾及了卫星空间几何结构分布情况。根据信噪比信息去确定要剔除的卫星,很好的顾及了外界环境对卫星观测质量的影响。
41、2.本公开利用抗差估计算法对复杂遮蔽/半遮蔽场景下ins辅助的单频gnss/mems紧耦合观测方程进行解算,可以降低低质量观测值对模糊度浮点解精度的影响。且利用抗差估计算法对用户位置进行最终解算,能够有效降低剩余误差对定位结果的影响,为单频gnss用户提供高精度的位置信息。
42、3.本公开能够推动北斗/gnss以及ins等技术融合在智能驾驶、智慧交通和车载导航等新兴领域的应用,能够使用户在城市复杂场景下获得高可靠、高可用和高精度的定位结果。
- 还没有人留言评论。精彩留言会获得点赞!