用于确定机械装置的部件的机械激励的方法和装置与流程
本发明涉及一种用于确定机械装置的部件的机械激励的方法。
背景技术:
1、弹性轴承是机械装置中的鉴于噪声传输所装入的声源的重要接合点。为了分析总系统中的噪声传输,典型地执行传递路径分析(tpa)。在此情况下,轴承的动态表征需要特别的小心。
2、为了实现这一点,迄今为止典型地通过自身的检验台执行耗费的动态轴承表征。困难在于,在感兴趣的频率范围(khz范围)中以及在预负荷下实施用于干净的轴承表征、例如自由悬吊或可替代地刚性夹紧的对应的边界条件。另一困难是对付温度和老化影响。与轴承表征相关联的不确定性相应地是高的。
技术实现思路
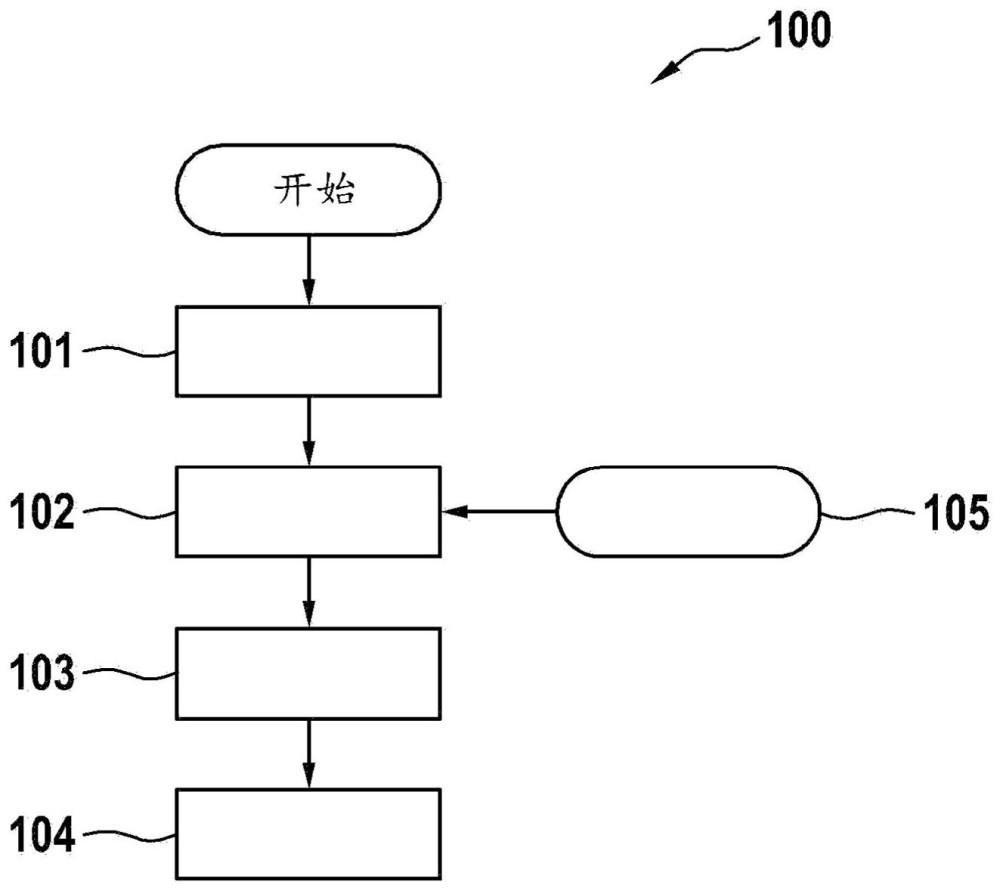
1、根据本发明的用于确定机械装置的部件的机械激励的方法,所述部件经由轴承与所述机械装置的激励源耦合,所述方法包括:定义由激励源在所述轴承的第一侧上引起的激励运动,确定所述轴承的第二侧上的通过所述激励运动引起的从所述轴承发出的激励,所述第二侧与部件耦合,其中从所述轴承发出的激励借助于人工系统被确定,所述人工系统已通过机器学习被训练,其中所述机器学习基于在至少一个真实存在的轴承处检测到的测量值进行,并且确定所述部件的机械激励,所述机械激励通过从所述轴承发出的激励引起。
2、根据本发明的用于确定机械装置的部件的机械激励的装置,所述部件经由轴承与所述机械装置的激励源耦合,所述装置包括计算单元,所述计算单元被设立用于:定义由所述激励源在所述轴承的第一侧上引起的激励运动,确定所述轴承的第二侧上的通过所述激励运动引起的并且从所述轴承发出的激励,所述第二侧与部件耦合,其中从所述轴承发出的激励借助于人工系统被确定,所述人工系统已通过机器学习被训练,其中所述机器学习基于在至少一个真实存在的轴承处检测到的测量值进行,并且确定所述部件的机械激励,所述机械激励通过从所述轴承发出的激励引起。
3、因此确定一种机械部件,其是机械装置的一部分。在此,该部件经由轴承与激励源耦合。因此,激励源是机械激励的引发者。激励源优选地是振动源。然而,原则上,机械装置的每种类型的激励都可以通过激励源进行,甚至那些不能通过频率和幅度描述为振动的激励。从激励源发出的激励运动优选地是激励振动或包括激励振动。从激励源发出的激励运动通过轴承被传递给部件。
4、激励源与轴承的第一侧耦合。该部件与轴承的第二侧耦合。轴承的第一侧和轴承的第二侧优选地是轴承的不同紧固点。
5、为了确定部件的机械激励,需要确定从轴承发出的激励,部件通过所述激励被激励。由于轴承对激励运动的传递的影响与大量参数有关,因此借助于人工系统确定从轴承发出的激励,其中该人工系统优选地是所谓的ki系统,即基于人工智能的系统。关于激励运动的信息被提供给人工系统。基于这些信息,人工系统计算在轴承的第二侧上发出的激励,所述激励施加在部件上。
6、为了确定在激励运动和从轴承发出的激励之间的关系,人工系统已经基于在至少一个真实存在的轴承处检测到的测量值被训练。在此,测量值可以具有不同的性质,以便尽可能准确地映射轴承的行为。在机器学习的范围中,不强制性地需要给轴承加载所有可能的激励运动。人工系统为此能够还确定轴承的未立即被检测的这样的传递特性。因为对轴承的传递特征产生影响的大量参数几乎不能以所有组合在测量技术上被检测,所以这尤其是也是有利的。通过使用通过机器学习已训练的人工系统,当人工系统根据可用的测量值被训练时就足够了。
7、通过人工系统确定以何种方式激励部件运动。
8、优选地为该方法提供机械装置的模型,其中定义部件、轴承和激励振动源彼此如何布置以及相互耦合。基于这样的模型,可以确定其他输入参数,例如可以计算出轴承的当前的预应力。如果人工系统已经针对对应的输入参数被训练,则这些信息也可以优选地被提供给所述人工系统。
9、从而通过经训练的机器学习模型进行轴承表征。经训练的机器学习模型在此是人工系统。由此实现不需要附加的特殊检验台用于具有所有其不确定性的轴承表征。通常可以从根据iso 20270的通常无论如何都存在的原位检验结构中提取对于机器学习所需要的测量值。
10、根据本发明的装置优选地被设立用于实施根据本发明的方法。
11、从属权利要求示出本发明的优选改进方案。
12、优选地,分别通过振动特性定义所述轴承的第一侧上的激励运动、所述轴承的第二侧上的发出的激励和所述部件的机械激励。因此,轴承的第一侧上的激励运动、轴承的第二侧上的发出的激励以及部件的机械激励优选地分别是振动。从而,轴承的第一侧上的从激励源发出的激励运动优选地是激励振动,轴承的第二侧上的发出的激励是发出的振动,并且部件的机械激励是部件振动。在此,振动可以具有不同的频率范围和不同的频率曲线。由于恰好振动可能对部件的相关特性有大的影响,例如通过共振效应,因此考虑振动是特别有利的。优选地通过对轴承施加不同的振动并且测量所得到的发出的振动来进行机器学习。
13、通过所述人工系统优选地提供描述所述轴承在所述轴承的第一侧和所述轴承的第二侧之间的过滤行为的传递函数。因此,过滤行为或传递函数可以在此随总系统的状态而改变。从而,传递函数例如与轴承的当前预应力有关,所述预应力例如基于机械装置的模型被确定。通过由人工系统提供传递函数,同样使得能够将所述人工系统集成到用于确定振动的已知工具、尤其是tpa工具中。
14、还有利的是,在确定部件的机械激励时,给从轴承发出的激励加载描述所述部件的传递特征的传递函数。以这种方式,可以对传递路径进行建模,激励运动处于所述传递路径的开端处,并且其输出值是部件的机械激励,其中还可以考虑部件本身的传递特性。
15、进一步优选地,从所述部件的机械激励中确定所得到的声学振动。从而,部件的机械激励例如被用作声学方法的输入值,通过所述声学方法例如模拟声学传递通路。以这种方式,通过该方法可以确定由用户如何在声学上感知从激励源发出的激励运动。
16、进行所述机器学习所基于的测量值优选地包括阻塞力、加速度值、速度数据和/或传递函数。在此,优选地通过安置在真实存在的轴承处的传感器检测测量值,而给所述轴承加载不同的激励运动。
17、机械装置优选地是车辆或热泵,其中激励源尤其是车辆或热泵的发动机。恰好在这些领域中,通过用户感知哪些运动或所得到的声学振动对于用户而言是相关的。不期望的运动或振动可以通过根据本发明的方法被标识并且随后被最小化。
18、该方法优选地还包括检测用于机器学习所使用的测量值。优选地,因此还在至少一个真实存在的轴承处检测测量值,并且基于测量值实施机器学习。测量值的检测和机器学习的实施在此优选地仅须进行一次。下面,可以针对不同的部件和不同的激励振动源来确定部件振动。测量值的检测优选地在一个或多个真实存在的轴承处进行。在此,优选地使用结构相同或类似的轴承用于生成测量值。用于检测测量值所使用的轴承不强制性地与在确定部件的机械激励时在模型中考虑的轴承是结构相同的。从而,类似的轴承通常也具有类似的传递特征,通过人工系统再现所述传递特征。
19、优选地,进行所述机器学习所基于的测量值已经在安装在机械装置中的真实存在的轴承处被检测或者已经在布置在检验台中的真实存在的轴承处被检测。由此可以检测特别切合实际的测量值,所述测量值反映轴承的实际行为。符合事实的测量值也导致通过人工系统符合事实地再现轴承。
20、在该方法的范围中,优选地确定部件的机械激励,其中以不同的方式修改部件并且确定部件的属于分别存在的结构类型的不同的机械激励。从部件的不同的机械激励中选择部件的导致所述部件的最小机械激励或导致所得的最小声学振动的这样的结构类型。部件的这样的实现优选地被使用用于实现机械装置。
- 还没有人留言评论。精彩留言会获得点赞!