基于四叶草式光纤结阵列的三维力解耦测量装置和方法与流程
本发明涉及一种三维力测量装置和方法,具体是涉及了一种利用四叶草式光纤结阵列实现解耦的装置和方法,并展示一项该方案在机器人指尖三维力测量中的实例。
背景技术:
1、力触觉感知,特别是摩擦力测量,在机器人灵巧操作中起着至关重要的作用。大量基于电学、磁学和光学原理的柔性触觉传感器已被成功用于机器人应用中。其中,光纤传感器具备显著优势和特点,如多模态、分布式传感特性,以及抗电磁干扰和耐腐蚀的能力。
2、光纤结传感器为一种新型光纤传感器,其核心部件为一个由聚合物光纤打结形成的光纤结。光纤结中光纤与自身交错,容易因外力产生弯曲损耗,导致光透过率下降,因此光纤结传感器适合用于压力测量。然而,单个光纤结传感器难以测量摩擦力。
3、能够同时测量法向力和切向力的传感器被称为三维力传感器。三维力传感器常被安装在机械臂的关节处,用于碰撞检测、柔顺控制等场景,或安装在机械手指末端,用于测量抓取过程中指尖的压力和摩擦力。现有三维力传感器由于结构复杂或材料特性,都存在一定程度的维间耦合或非线性特征,使得三维力解耦存在一定困难,体现在标定工作量大、解耦算法复杂、解耦精度欠佳等方面。
技术实现思路
1、为解决背景技术中存在的问题,本发明的目的是针对机器人指尖三维力测量,提供一种利用四叶草式光纤结阵列的测量装置和实现解耦的方法。本发明无需借助解耦算法进行测量,具有无维间耦合、与机械手集成度高、制备简易、鲁棒性好、可同时测量压力和摩擦力的特点。
2、本发明的技术方案是:
3、一、一种基于四叶草式光纤结阵列的三维力解耦测量装置:
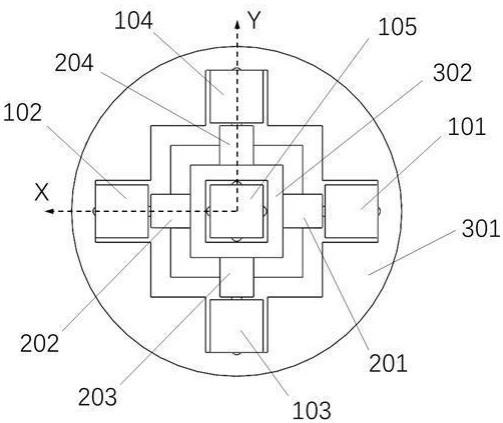
4、包括用于组成三维力测量核心元件的五个光纤结传感器,其中四个光纤结传感器等距地分布在一个圆周上,且在圆周的圆心处设置第五个光纤结传感器,形成四叶草式阵列布局。
5、所述的五个光纤结传感器分别用于测量-x、+x、-y、+y、+z方向的分力-fx、+fx、-fy、+fy、+fz。
6、所述的五个光纤结传感器被封装在金属壳体中并通过滑块隔离,所述的滑块为刚性结构和材料,其中四个光纤结传感器和滑块之间均通过各自不同的压柱进行连接,第五个光纤结传感器放置于滑块内部,外力的分力通过不同的压柱传导到各个不同的光纤结传感器上,实现三维力解耦测量。
7、所述的三维力测量核心元件包括五个光纤结传感器和金属壳体;
8、所述的金属壳体包括用于容纳光纤结传感器的第一容器、滑块、盖子和底盘,滑块布置在第一容器的中心且能够沿垂直于第五个光纤结传感器所检测力的方向滑动,第一容器内在滑块周围四面处沿周向等间距布置四个光纤结传感器,滑块内部设置有中心通道,中心通道内布置有第五个光纤结传感器,滑块底部和用于滑块的底盘滚动连接,第一容器上端封盖设有用于封盖住滑块周围四边处的四个光纤结传感器的盖子。
9、具体实施中,中心通道内部设有台阶,第五个光纤结传感器下端置于且支撑于台阶上。
10、所述的底盘包括从上到下依次层叠的底盘上盖、滚珠和底盘底板,底盘上盖上开设有多个用于滚珠穿设过的孔槽,底盘底板之上布置有多个滚珠,滚珠向上穿过底盘上盖上的孔槽后露出并和滑块底面滚动连接,使得滑块底部和支撑底盘滚动连接。
11、所述的三维力测量核心元件安装在机械手指板件中,且在机械手指板件上端布置受力组件,受力组件伸入到三维力测量核心元件中和第五个光纤结传感器接触连接;外力xy方向的分力经受力组件、滑块和压柱传递到其中四个光纤结传感器上,外力在z方向的分力经受力组件传递到第五个光纤结传感器上。
12、同时机械手指板件侧部固定于机械手上,机械手可以为两指机械手500,机械手指板件下端套装在用于容纳光纤尾纤的第二容器中。
13、所述的受力组件包括从上到下依次层叠布置的橡胶垫、受力板、顶盖和三维力压柱,三维力压柱下端面设有中心的凸起杆,凸起杆穿过金属壳体的盖子伸入到滑块的中心通道中和第五个光纤结传感器的顶端面接触连接, 外力在z方向的分力经受力组件的橡胶垫、受力板、顶盖和三维力压柱依次传递后,最终经三维力压柱传递到第五个光纤结传感器上。
14、第一容器内,滑块周围四面处的四个光纤结传感器分别和滑块周围四面之间均设置有一个压柱,使得每个光纤结传感器均经各自的一个压柱和滑块周围一侧面接触连接。
15、具体实施中,四个光纤结传感器对应的压柱嵌装在盖子底部侧面的孔内。盖子底部设置环形凸起,环形凸起四周设置四个孔,压柱水平安装在孔中。
16、外力在xy方向的分力经受力组件、滑块和压柱传递到其中四个光纤结传感器上,四个光纤结传感器被各自的压柱支撑压到滑块上,实现刚性接触。
17、每个光纤结传感器包括一个光纤结和一个硅胶立方块,光纤结被封装在硅胶立方块中形成光纤结块,且位于硅胶立方块对称的中心截面上,且光纤结与硅胶立方块的顶面、底面、左右两侧面均相切;各个光纤结传感器的光纤结块以四叶草式阵列布局。
18、每个光纤结传感器中,光纤结的两端尾纤从硅胶立方块穿出后和检测组件电连接,所述的检测组件包括发光二极管和光电二极管,光纤结的两端向下从硅胶立方块穿出后分别和发光二极管和光电二极管电连接,且发光二极管和光电二极管均布置在遮光夹具中。
19、硅胶立方块采用硅胶制成。
20、发光二极管和光电二极管电连接到电路板,由发光二极管发出的光在光纤结传感器中传输,最终由光电二极管接收并转换为电流,电路板向发光二极管提供恒定电流,同时收集光电二极管产生的电流并转换为电压输出。
21、所述的第二容器侧壁开设用于光纤结传感器的光纤尾纤穿设过的通孔,通孔处布置用于光纤尾纤穿设过且进行保护的光纤保护套。光纤结两端的光纤尾纤依次从通孔和光纤保护套穿过后和机械手上的检测组件连接。
22、各个光纤结传感器所连接的检测组件的发光二极管布置在一起组成发光二极管阵列,各个光纤结传感器所连接的检测组件的光电二极管布置在一起组成光电二极管阵列,发光二极管阵列和光电二极管阵列均布置在电路板上,电路板向发光二极管阵列提供恒定电流,同时收集光电二极管阵列产生的电流并转换为电压输出。
23、电路板和计算机电连接,计算机又和两指机械手电连接,用于控制两指机械手的运动。
24、二、基于三维力解耦测量装置的三维力解耦测量方法:
25、水平面上建立两个相互正交的方向作为x方向和y方向在三维力解耦测量装置的水平面上建立三个相互正交的方向作为xyz方向,以三维力解耦测量装置的上下方向作为z方向,在垂直于z方向的平面上建立两个相互正交的方向作为z方向和y方向。
26、外力xy方向的分力经受力组件、滑块和压柱传递到其中四个光纤结传感器上,外力在z方向的分力经受力组件传递到第五个光纤结传感器上;
27、对于每个光纤结传感器,当压力加载在光纤结传感器的顶面、左侧面或右侧面时,光纤结传感器内的硅胶立方块发生形变并带动光纤结产生形变,使得光纤结产生弯曲损耗,使得经过光纤结的光透过率降低,进而使得从发光二极管发出经过光纤结被光电二极管接收的光强降低,从而光电二极管输出的电流以及转化输出的电压值降低;
28、电路板向发光二极管提供恒定电流,同时收集光电二极管产生的电流并转换为电压输出;通过标定每个光纤结传感器对各自所测量分力和输出电压之间关系,根据标定的函数关系对待测情况所检测的输出电压处理获得直接的测量分力,而无需借助解耦算法,即可获得三维力传感器的“电压-力”转换关系。
29、本发明通过上述整体结构设置,使得五个光纤结传感器被刚性的滑块结构巧妙隔离在不同的方位位置,相互互不干涉影响,能够各自独立测量力,从而无需解耦计算和处理,进行直接的力测量。
30、本发明包括五个由硅胶立方块包裹聚合物光纤结制成的光纤结传感器;按照四叶草式布局,五个光纤结传感器被封装在金属壳体中,分别测量指向-x、+x、-y、+y、+z方向的分力,从而消除三维力测量中的维间耦合。具体将这五个光纤结传感器按照四叶草式布局封装在金属壳体中,通过压柱和滑块将外力的分力分别传导到每个光纤结传感器上,实现三维力测量。
31、光纤结传感器为硅胶包裹的光纤结。光纤结由聚合物光纤打结形成。硅胶呈立方体块状。结位于硅胶块的一个对称面上。硅胶仅包裹光纤成结的部分,不包裹尾纤。尾纤指从结中延伸出的光纤段。
32、光纤结传感器的两端分别连接发光二极管和光电二极管,由发光二极管发出的光在光纤结传感器中传输,最终由光电二极管接收并转换为电流。电路板向发光二极管提供恒定电流,同时收集光电二极管产生的电流并转换为电压输出。
33、光纤结传感器受压力作用后,光纤结产生弯曲损耗,光透过率下降,电路板输出的电压值减小。
34、通过分别标定每个光纤结传感器对各自所测量分力的响应,获得受力大小与输出电压大小的函数关系,无需借助解耦算法,即可获得三维力传感器的“电压-力”转换关系。
35、与现有技术相比,本发明的有益效果是:(1)五个方向(-x、+x、-y、+y、+z)的分力分别由五个光纤结传感器测量,消除了维间耦合,避免了解耦算法,降低了三维力求解难度和标定工作量。
36、(2)通过调节光纤结的大小、硅胶硬度、压柱尺寸可以对传感器的灵敏度、工作范围等传感性能进行调整。
37、(3)光纤结和硅胶的制备工艺简单、成本低廉。本发明所涉及的三维力传感器的机械结构简单易加工。
38、(4)本发明所涉及的三维力传感器基于光学原理工作,抗电磁干扰和布线串扰,不会产生漏电、短路等安全隐患,安全性较高。
- 还没有人留言评论。精彩留言会获得点赞!