一种单轴加速度传感器横向灵敏度参数测量方法
本发明属于振动冲击加速度传感器校准方法,尤其涉及一种基于霍普金森杆的单轴加速度传感器的横向灵敏度的测量方法。
背景技术:
1、高g值加速度计广泛应用于航空航天、汽车、工业、医疗等领域,灵敏度是加速度传感器的重要指标之一。加速度传感器的灵敏度通常分为主轴灵敏度和横向灵敏度。理想情况下,单轴加速度传感器只对主轴方向的加速度有响应,而对横向方向的加速度无响应。但实际上,由于制造工艺、安装误差等原因,加速度传感器总会存在一定程度的横向灵敏度,导致输出信号中包含横向方向的干扰成分,影响测量精度。因此,测量并校正加速度传感器的横向灵敏度是提高其性能的重要手段。
2、单轴加速度计的横向灵敏度具有方向性,在与被校加速度计主轴垂直的横向平面内输入信号方向不同,其横向灵敏度大小不同。理论上,加速度计最大横向灵敏度比的方向与最小横向灵敏度比方向角相差90°,因此,加速度计横向灵敏度测量的目标是测定最大横向灵敏度比和加速度计横向效应最小角度。确定加速度计横向灵敏度最小的方向后,可以在安装加速度计时,选择合适的安装角度,以减小加速度计横向灵敏度对加速度计的输出信号造成的影响。
3、加速度计横向输出灵敏度的常用的测试方法有重力场翻滚测试法和离心机法。但它们适合量程小于1g的加速度计,而许多加速度计往往用于高g值的场合。hopkinson杆作为一种动态加载装置,因其结构简单、操作方便、测量方法巧妙及加载波形易控等优点,已广泛应用于单轴高g值加速度计校准,但现有的hopkinson杆灵敏度测试方法,没有考虑冲击波造成的霍普金森杆和砧体本身的横向偏移,这样,加速度计输出信号中就会包含装置的横向方向的干扰成分,致使测量出来的加速度计的横向灵敏度出现较大的偏差。
技术实现思路
1、针对上述现有技术存在的问题,本发明的目的是提供一种单轴加速度传感器横向灵敏度参数测量方法,该方法利用霍普金森杆产生高强度的冲击波作为输入信号,并采用多台激光测振仪对霍普金森杆以及转接砧体进行多点测量,精确测得霍普金森杆及转接砧体装置本身产生的横向偏移,消除由于测量装置本身对振动冲击加速度传感器横向灵敏度校准带来的测量误差,从而提高振动冲击加速度传感器横向灵敏度的测量精度。
2、本发明的目的是通过下述技术方案实现的:
3、本发明公开的一种单轴加速度传感器横向灵敏度参数测量方法,利用霍普金森杆冲击校准装置,安装好转接砧体及振动冲击加速度传感器。布置两台激光测振仪分别测量霍普金森杆末端处主冲击轴向和水平横向的冲击加速度;布置另外两台激光测振仪分别测量转接砧体的主冲击轴向和水平横向的冲击加速度。根据所测得的加速度值,解算出霍普金森杆横向效应的耦合系数矩阵以及安装转接砧体后的横向效应系数矩阵,通过消除霍普金森杆装置横向效应的影响,得到振动冲击加速度传感器此时安装角度的精确横向灵敏度参数;旋转振动冲击加速度传感器,改变振动冲击加速度传感器的安装方向,重复试验,可测得振动冲击加速度传感器不同安装角度的横向灵敏度,从而测定最大横向灵敏度比和最小横向灵敏度比的角度,提高振动冲击加速度传感器横向灵敏度的校准精度。
4、本发明公开的一种单轴加速度传感器横向灵敏度参数测量方法,包括以下步骤:
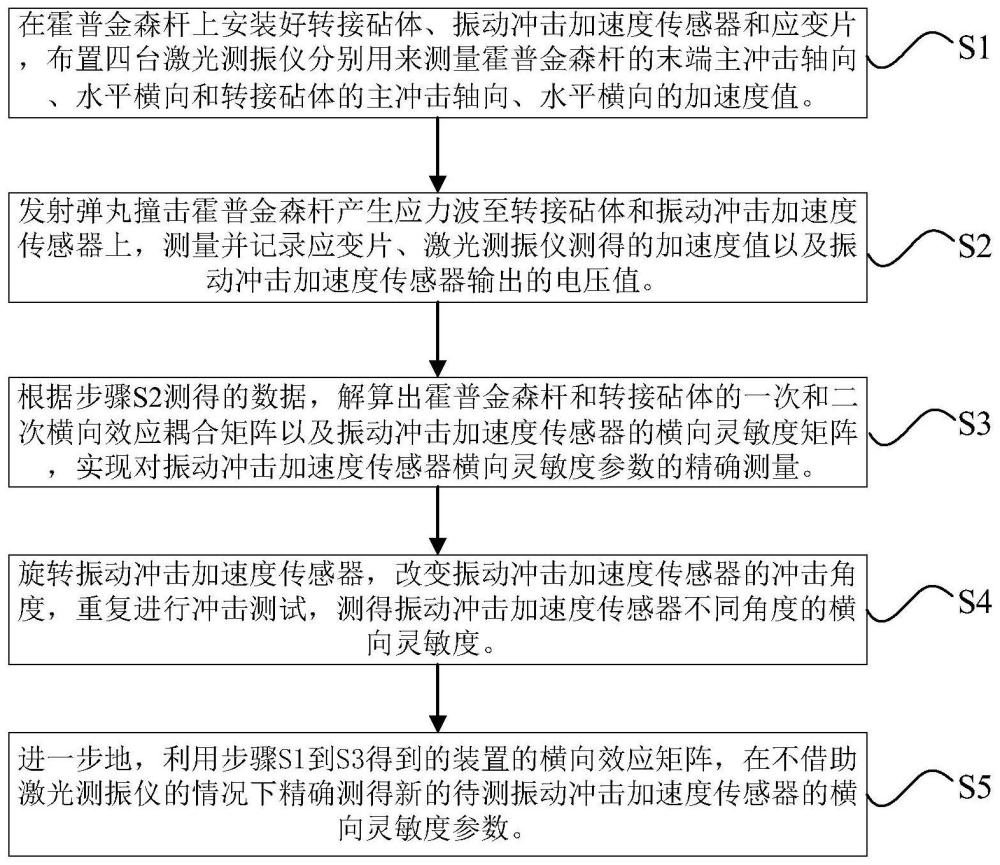
5、s1:在霍普金森杆上安装好转接砧体、振动冲击加速度传感器和应变片,布置四台激光测振仪分别用来测量霍普金森杆的末端主冲击轴向、水平横向和转接砧体的主冲击轴向、水平横向的加速度值。
6、s11:布置好霍普金森杆冲击装置,将转接砧体安装在霍普金森杆末端;将待测试的振动冲击加速度传感器按一定旋转角度固定在转接砧体上,使振动冲击加速度传感器的主轴与霍普金森杆的主冲击方向相垂直。
7、s12:将应变片粘贴在霍普金森杆上,用来测量霍普金森杆主冲击轴向的加速度;
8、s13:将两台激光测振仪布置在霍普金森杆的末端,分别测量霍普金森杆末端主冲击方向z方向和水平横向x方向的加速度值。将另外两台激光测振仪布置在转接砧体周围,分别测量转接砧体的主冲击方向z方向和水平横向x方向的加速度值,从而实现精确测量霍普金森杆校准装置的横向响应。
9、s2:发射弹丸撞击霍普金森杆产生应力波至转接砧体和振动冲击加速度传感器上,测量并记录应变片、激光测振仪测得的加速度值以及振动冲击加速度传感器输出的电压值。
10、s21:发射实验弹丸撞击霍普金森杆产生应力波,应力波沿杆向前传播经过应变片传播到杆末端以及转接砧体上,应力波继续向前传播到振动冲击加速度传感器上。
11、s22:应变片测量杆的应变数据,振动冲击加速度传感器输出水平方向的电压数据;两台激光测振仪分别测量霍普金森杆主冲击方向z方向以及水平横向x方向的加速度;另外采用两台激光测振仪分别测量转接砧体在主冲击方向z方向以及水平横向x方向的加速度;采集器记录以上测得的数据;
12、s3:根据步骤s2测得的数据,解算出霍普金森杆和转接砧体的一次横向效应和二次横向效应耦合矩阵以及振动冲击加速度传感器的横向灵敏度矩阵,实现对振动冲击加速度传感器横向灵敏度参数的精确测量。
13、s31:步骤s2中应变片测得的霍普金森杆的主冲击方向加速度为asz,激光测振仪测得的霍普金森杆末端处的主冲击方向z方向加速度为ahz、水平横向x方向偏移加速度为ahx,计算获得霍普金森杆装置的一次耦合系数矩阵如表达式(1)所示:
14、ah=m1asz (1)
15、其中,即霍普金森杆的末端输出加速度矩阵;m1是霍普金森杆装置的杆的一次耦合系数矩阵,则:
16、
17、其中,m11~m21为矩阵m1中的待确定元素;
18、进行冲击实验,测得霍普金森杆的输入加速度asz,以及霍普金森杆的输出加速度矩阵ah,解算出矩阵m1:
19、
20、s32:s2所测得的转接砧体主冲击方向z方向加速度为amz,水平横向x方向偏移加速度为amx,转接砧体的横向灵敏度矩阵m2的关系如式(4)所示:
21、am=m2ah (4)
22、其中,即转接砧体的加速度;m2是转接砧体的灵敏度矩阵。(4)式展开,有:
23、
24、其中,m11~m22为矩阵m2中的待确定元素;m21为转接砧体x方向的横向灵敏度。
25、通过多次实验,测得转接砧体的多组输入加速度矩阵ah以及转接砧体的多组输出加速度矩阵am,求解线性方程组解算得到m2中的4个系数。作为优选,用最小二乘法求解线性方程组解算得到m2中的4个系数。
26、s33:s2所测得的振动冲击加速度传感器的横向输出电压为ut,振动冲击加速度传感器的横向灵敏度矩阵m3的关系如式(6)所示:
27、ut=m3am=m3m2ah (6)
28、其中,ut即振动冲击加速度传感器的电压输出,m3是振动冲击加速度传感器的横向灵敏度矩阵。(6)式展开,有:
29、
30、其中,m11、m12为矩阵m3中的待确定元素;m11为振动冲击加速度传感器的横向灵敏度。
31、通过多次实验,测得振动冲击加速度传感器的多组输入加速度矩阵am以及振动冲击加速度传感器的多组输出电压矩阵ut,如式(8),解算得到m3中的2个系数。作为优选,用最小二乘法求解线性方程组可以解算m3中的2个系数。
32、
33、其中:u和a的下标数字1,2,…,n为实验次数,n≥3;
34、s34:得到霍普金森杆冲击校准装置的横向灵敏度二次耦合矩阵m如式(9)所示:
35、m=m2m1 (9)
36、得到振动冲击加速度传感器的横向灵敏度计算的耦合矩阵m如式(10)所示:
37、m=m3m2m1 (10)
38、s4:旋转振动冲击加速度传感器,改变振动冲击加速度传感器的冲击角度,重复进行冲击测试,获得振动冲击加速度传感器不同角度的横向灵敏度。
39、s41:旋转振动冲击加速度传感器,改变振动冲击加速度传感器的冲击角度,重复进行冲击测试,测得振动冲击加速度传感器不同角度的横向灵敏度。
40、s42:根据步骤s41的测量结果,找出最大横向灵敏度比和最小横向灵敏度比的角度。单轴加速度传感器横向灵敏度测量方法仅需要使用激光测振仪对霍普金森杆冲击装置进行一次校准,从而获得霍普金森杆装置的横向效应参数矩阵,后续测试新的振动冲击加速度传感器不再需要对装置进行横向效应的重复校准,利用一次校准获得的横向效应参数矩阵实现振动冲击加速度传感器的横向灵敏度精确测算,提高振动冲击加速度传感器的测量精度以及测量的便捷性。
41、步骤s4中旋转振动冲击加速度传感器,改变振动冲击加速度传感器的冲击角度。作为优选,采用旋转转接砧体的方式旋转振动冲击加速度传感器。转接砧体为正多边形拉伸而成的多面体,其剖面为正多边形。正多边形边数越多,传感器能够旋转角度就越多,测量出的最大横向灵敏度比和最小横向灵敏度比的角度越精确。作为优选,正多边形边数选为8个,即正多边形为正八边形。
42、还包括s5:利用步骤s1到s3得到的装置的横向效应矩阵m1、m2,能够在不借助激光测振仪的情况下精确测得新的待测振动冲击加速度传感器的横向灵敏度参数。
43、s51:安装好转接砧体以及待测振动冲击加速度传感器,使振动冲击传感器的主轴与霍普金森杆的冲击方向相垂直;进行冲击实验,使用应变片测得霍普金森杆主冲击方向加速度asz,使用振动冲击加速度传感器测得传感器的输出ut;进行多次冲击测试,得到多组asz和ut。
44、s52:将asz代入矩阵m1,计算得到霍普金森杆末端轴向和横向的输出ahz、ahx;将得到的ahz、ahx以及传感器的输出ut三个值代入式(6),由于m2已知,计算得到振动冲击加速度传感器的横向灵敏度矩阵m3。作为优选,通过最小二乘法计算得到振动冲击加速度传感器的横向灵敏度矩阵m3。
45、s53:改变振动冲击加速度传感器的冲击角度,重复步骤s51到s52,测得振动冲击加速度传感器不同角度的横向灵敏度,测定最大横向灵敏度比和最小横向灵敏度比的角度,提高振动冲击加速度传感器横向灵敏度的校准精度。
46、有益效果:
47、1、本发明公开的一种单轴加速度传感器横向灵敏度参数测量方法,针对现有振动冲击加速度传感器校准没有考虑霍普金森杆和转接砧体的横向效应导致横向灵敏度精度不高的问题,布置多台激光测振仪,分别用来测量霍普金森杆的末端处及转接砧体轴向和横向的加速度,从而解算出霍普金森杆以及转接砧体的一次耦合和二次耦合矩阵,能够精确得到校准装置的横向灵敏度参数,从而消除装置的横向效应带来的误差。
48、2、本发明公开的一种单轴加速度传感器横向灵敏度参数测量方法,使用多台激光测振仪能够精确测得转接砧体轴向和横向的加速度值,而传统的校准方式只能测得轴向的一个加速度,提高了测量精度;再结合振动冲击加速度传感器的输出,能够精确解算出振动冲击传感器的横向灵敏度参数;改变振动冲击加速度传感器的冲击角度,可测得振动冲击加速度传感器不同角度的横向灵敏度,从而确定最大横向灵敏度比和最小横向灵敏度比的角度,实现振动冲击加速度传感器横向灵敏度参数的精确测量,提高振动冲击加速度传感器横向灵敏度的测量精度。
49、3、本发明公开的一种单轴加速度传感器横向灵敏度参数测量方法,仅需要使用激光测振仪对霍普金森杆校准装置校准一次,就能获得霍普金森杆装置的横向效应参数矩阵,后续对新的振动冲击加速度传感器的灵敏度校准不再需要对装置进行重复校准,从而不借助激光测振仪,达到使用简单的应变片也能够得到精确的振动冲击加速度传感器的横向灵敏度的目的,提高了振动冲击加速度传感器的测量精度以及测量的便捷性。
50、4、本发明公开的一种单轴加速度传感器横向灵敏度参数测量方法,使用多台激光测振仪精确地获得霍普金森杆末端及转接砧体的轴向和横向方向的加速度,建立应变片与激光测振仪测量结果的灵敏度耦合关系矩阵,弥补传统方式使用应变片只能测量霍普金森杆主冲击方向上的加速度、无法获取装置横向效应的缺点。本发明准确地获取冲击校准装置自身的横向灵敏度参数,提高振动冲击加速度计横向灵敏度校准的精度。
51、5、本发明公开的一种单轴加速度传感器横向灵敏度参数测量方法,采用了正多边形拉伸而成的多面体作为砧体,从而通过改变转接砧体的安装角度就能实现振动冲击加速度传感器的旋转,达到冲击加速度传感器不同角度的目的。正多边形边数越多,传感器能够旋转角度就越多,测量出的最大横向灵敏度比和最小横向灵敏度比的角度越精确。
- 还没有人留言评论。精彩留言会获得点赞!