一种基于多星对非合作目标的视频成像方法及系统与流程
本发明涉及航空航天和卫星姿态运动学领域。更具体地,涉及一种基于多星对非合作目标的视频成像方法及系统。
背景技术:
1、视频成像卫星以视频录制的方式观测地面,是传统光学卫星对地面观测技术的升级。自2007年由印度尼西亚和德国合作研发的lupan-tubsat卫星和2014年由国防科技大学研制的试验卫星“天拓二号”发射至今的十几年间,视频卫星已经在城市交通实时监测、自然灾害应急快速响应、公共安全监控和国防军事等场景被广泛应用。其中,视频卫星能够通过对特定区域或目标在一段时间内持续观测成像,获得目标的更多运动变化信息。进一步将卫星视频数据与目标跟踪技术相结合,特别适合用于对运动目标的监测。低轨道视频卫星星座是近几年发展起来的一种新型的对地面或空中目标的观测方式,主要设计用于跟踪全球范围内对热点区域和目标的动态实时监测。低轨道视频卫星具有高敏捷、持续观测和低成本的特点,对动态目标的跟踪和监测方面具有很广泛的应用潜力。
2、但是,由于视频卫星获取的视频数据分辨率低、成像范围广、视频数据中目标所占的像素比例极小且视频背景复杂。大量与目标无关的山体、林地和建筑物等物体给目标跟踪算法产生的干扰远大于传统视频影像。因此,一些成熟的目标跟踪算法在视频卫星影像中的应用不如在传统视频中成功,难以提取和识别目标的特征,总结目标的运动规律。例如,机场停机坪内的纹理和阴影以及复杂的建筑外形等因素都会对以飞机为目标的实时跟踪造成巨大的背景干扰。目前尚未有针对高分辨率的视频卫星实时目标跟踪的成熟技术公开,针对高分辨视频卫星的实时目标跟踪仍是视频应用领域的亟待解决的问题。
技术实现思路
1、本发明的目的在于提供一种基于多星对非合作目标的视频成像方法及系统,以解决现有技术存在的问题中的至少一个。
2、为达到上述目的,本发明采用下述技术方案:
3、本发明第一方面提供了一种基于多星对非合作目标的视频成像方法,该方法包括
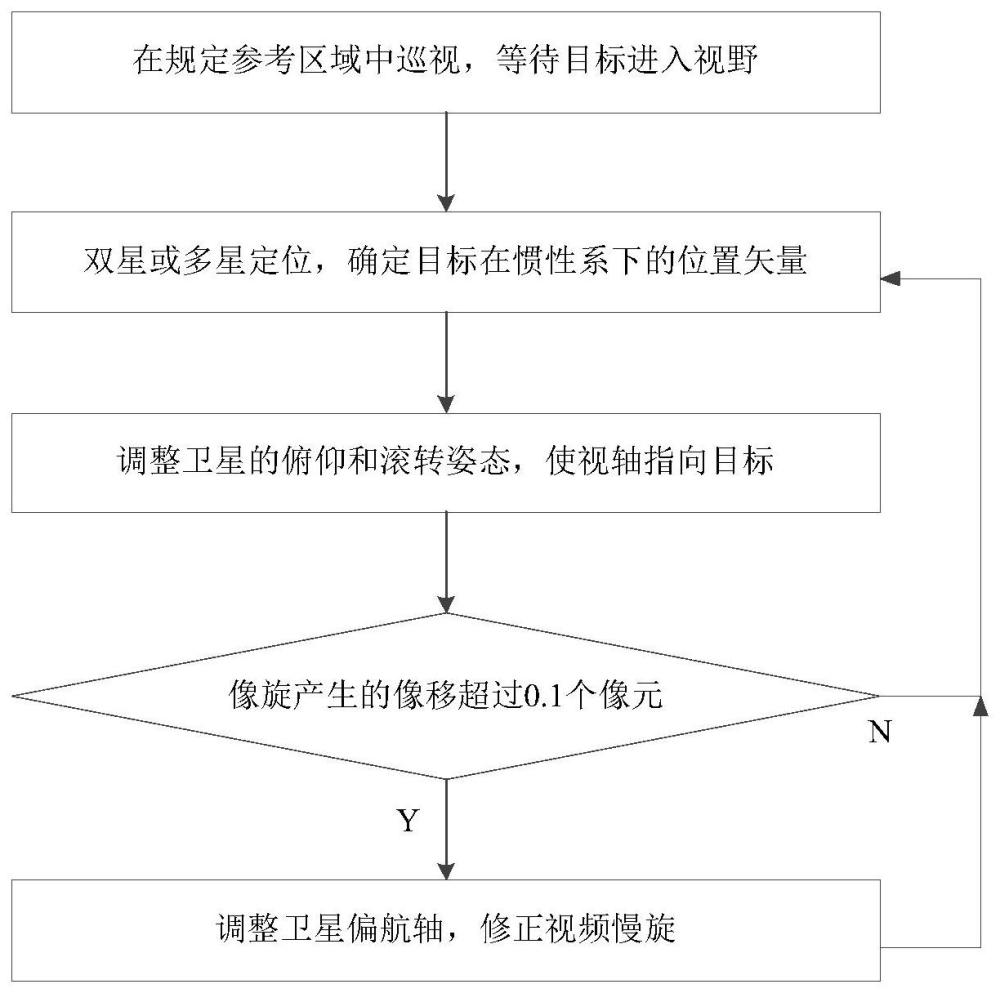
4、选定待观测的目标,并利用所述目标所在区域的卫星进行观测,当至少两颗所述卫星均捕获所述目标时进行定位计算,得到目标在地心惯性坐标系下的位置;
5、根据所述目标在地心惯性坐标系下的位置和所述卫星在地心惯性坐标系下的位置计算所述目标在轨道坐标系下的位置,并根据所述目标在轨道坐标系下的位置计算所述目标在轨道坐标系下沿观测方向的第一单位向量;
6、根据所述卫星中探测器的光轴与所述第一单位向量的夹角以及与所述光轴和所述第一单位向量垂直的第二单位矢量计算期望姿态机动四元数,并根据所述期望姿态机动四元数计算期望横滚角和期望俯仰角,及根据所述期望横滚角和所述期望俯仰角调节所述卫星的横滚姿态和俯仰姿态使得所述光轴与所述第一单位向量重合;
7、根据地标库中的两个背景点在图像坐标系中当前帧的位置和所述两个背景点位置的第一中垂线,以及地标库中的两个背景点在图像坐标系中下一帧的位置和所述两个背景点位置的第二中垂线,判断所述第一中垂线和所述第二中垂线的像移是否超过0.1个像元;
8、若所述像移超过0.1个像元,则根据所述地标库中的两个背景点在图像坐标系中当前帧的位置和下一帧的位置计算偏航角,并根据所述偏航角调节所述卫星的偏航姿态。
9、可选地,所述当至少两颗所述卫星均捕获所述目标时进行定位计算,得到目标在地心惯性坐标系下的位置包括
10、当两颗所述卫星均捕获所述目标时进行定位计算,得到目标在地心惯性坐标系下的位置的计算公式为
11、
12、式中,msx1为第一颗卫星的目标视线在惯性坐标系中的第一方向分量;msy1为第一颗卫星的目标视线在惯性坐标系中的第二方向分量;msz1为第一颗卫星的目标视线在惯性坐标系中的第三方向分量;msx2为第二颗卫星的目标视线在惯性坐标系中的第一方向分量;msy2为第一颗卫星的目标视线在惯性坐标系中的第二方向分量;xs1为第一颗卫星在地心惯性坐标系下位置的第一坐标分量;ys1为第一颗卫星在地心惯性坐标系下位置的第二坐标分量;xs2为第二颗卫星在地心惯性坐标系下位置的第一坐标分量;ys2为第二颗卫星在地心惯性坐标系下位置的第二坐标分量。
13、可选地,所述当至少两颗所述卫星均捕获所述目标时进行定位计算,得到目标在地心惯性坐标系下的位置包括
14、当n颗所述卫星均捕获所述目标时进行定位计算,得到目标在地心惯性坐标系下的位置的计算公式为
15、
16、式中,n>2;xij为任意两条目标视线求解的目标观测的第一位置分量;yij为;zij为任意两条目标视线求解的目标观测的第二位置分量;zij为任意两条目标视线求解的目标观测的第三位置分量。
17、可选地,所述根据所述目标在地心惯性坐标系下的位置和所述卫星在地心惯性坐标系下的位置计算所述目标在轨道坐标系下的位置的计算公式为
18、
19、式中,为卫星在地心惯性坐标系下的位置矢量;为从地心惯性坐标系到轨道坐标系的坐标转换矩阵。
20、可选地,所述根据所述目标在轨道坐标系下的位置计算所述目标在轨道坐标系下沿观测方向的第一单位向量的计算公式为
21、
22、式中,|*|为取模运算。
23、可选地,所述根据所述卫星中探测器的光轴与所述第一单位向量的夹角以及与所述光轴和所述第一单位向量垂直的第二单位矢量计算期望姿态机动四元数的计算公式为
24、
25、式中,δ为所述卫星中探测器的光轴与所述第一单位向量的夹角;e为与所述光轴和所述第一单位向量垂直的第二单位矢量;qc0为期望姿态机动四元数的第一分量;qc1为期望姿态机动四元数的第二分量;qc2为期望姿态机动四元数的第三分量;qc3为期望姿态机动四元数的第四分量。
26、可选地,所述根据所述期望姿态机动四元数计算期望横滚角的计算公式为
27、
28、可选地,所述根据所述期望姿态机动四元数计算期望俯仰角的计算公式为
29、
30、可选地,所述根据所述地标库中的两个背景点在图像坐标系中当前帧的位置和下一帧的位置计算偏航角的计算公式为
31、
32、式中,u1为地标库中的第一个背景点在图像坐标系中当前帧的第一位置分量;v1为地标库中的第一个背景点在图像坐标系中当前帧的第二位置分量;u2为地标库中的第二个背景点在图像坐标系中当前帧的第一位置分量;v2为地标库中的第二个背景点在图像坐标系中当前帧的第二位置分量;u1′为地标库中的第一个背景点在图像坐标系中下一帧的第一位置分量;v1′为地标库中的第一个背景点在图像坐标系中下一帧的第二位置分量;u2′为地标库中的第二个背景点在图像坐标系中下一帧的第一位置分量;v2′为地标库中的第二个背景点在图像坐标系中下一帧的第二位置分量。
33、本发明第二方面提供了一种基于多星对非合作目标的视频成像系统,该系统包括
34、第一计算模块,用于选定待观测的目标,并利用所述目标所在区域的卫星进行观测,当至少两颗所述卫星均捕获所述目标时进行定位计算,得到目标在地心惯性坐标系下的位置;
35、第二计算模块,用于根据所述目标在地心惯性坐标系下的位置和所述卫星在地心惯性坐标系下的位置计算所述目标在轨道坐标系下的位置,并根据所述目标在轨道坐标系下的位置计算所述目标在轨道坐标系下沿观测方向的第一单位向量;
36、第三计算及调节模块,用于根据所述卫星中探测器的光轴与所述第一单位向量的夹角以及与所述光轴和所述第一单位向量垂直的第二单位矢量计算期望姿态机动四元数,并根据所述期望姿态机动四元数计算期望横滚角和期望俯仰角,及根据所述期望横滚角和所述期望俯仰角调节所述卫星的横滚姿态和俯仰姿态使得所述光轴与所述第一单位向量重合;
37、判断模块,用于根据地标库中的两个背景点在图像坐标系中当前帧的位置和所述两个背景点位置的第一中垂线,以及地标库中的两个背景点在图像坐标系中下一帧的位置和所述两个背景点位置的第二中垂线,判断所述第一中垂线和所述第二中垂线的像移是否超过0.1个像元;
38、第四计算及调节模块,用于若所述像移超过0.1个像元,则根据所述地标库中的两个背景点在图像坐标系中当前帧的位置和下一帧的位置计算偏航角,并根据所述偏航角调节所述卫星的偏航姿态。
39、本发明的有益效果如下:
40、本发明提出一种基于多星对非合作目标的视频成像方法,该方法能够为对地观测卫星星座系统的任务设计提供一种任务场景和实现思路,实现对未知的目标进行持续跟踪和监测,并将目标固定在视野中央;通过建立地标库,在与目标无关的背景中提取有效的观测信息加以利用,来消除由于运动视频成像产生的像旋,以获得更加清晰的跟踪视频影像,以减少在视频处理中给目标跟踪算法产生的干扰,提高对目标识别和运动规律分析的可靠性。
- 还没有人留言评论。精彩留言会获得点赞!