一种基于伪随机码调制的两步法激光测距方法及系统
本发明属于激光测距,具体涉及一种基于伪随机码调制的两步法激光测距方法及系统。
背景技术:
1、激光测距技术不断融合微电子和信息处理等技术得到了飞速发展,特别是红外激光雷达,因具有优良隐蔽性特点,以及满足人眼安全的波长特性,在测量、医疗等领域有重要应用。激光雷达技术探测距离具有探测距离远、测量精度高、探测周期短等特点,在航空航天、军事、民用等领域内被广泛应用。传统线性探测模式下工作的激光雷达测距系统信噪比(signal noise ratio,snr)低,对激光源发射功率要求较高,激光源体积较大,不符合激光雷达测距系统发展趋势要求。单光子测距采用了新的测距体制,在设备体积和质量等受限的机载环境下可实现远距离测距,拥有非常广阔的发展前景和可观的应用市场。但在低信噪比环境下,经过空间远距离传输衰减后,回波信号功率很微弱,可能会完全泯灭于噪声之中,往往不能满足现代工业的较高需求。
2、针对低信噪比下回波信号提取的问题,目前提出引入伪随机码调制技术,该方法首先生成伪随机码来调制发射激光,调制激光经过目标表面反射后,单光子探测器响应回波光子输出回波脉冲,最后数据处理时将回波脉冲还原为回波信号,利用伪随机码相关性从回波信号中解算出距离信息,完成激光测距。该方法并不直接依赖于光学系统接收信号功率大小,故降低了背景光和热辐射干扰概率,有效提高了系统信噪比,与传统激光测距相比拥有更高测量精度和更高信噪比,有效提高了系统snr,增大传输距离。提高伪随机码调制频率可以改善测距精度,但可探测最大不模糊距离会缩短,因此基于伪随机码调制的激光测距方法其思路可供参考,但技术途径有待完善。
技术实现思路
1、本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种基于伪随机码调制的两步法激光测距方法及系统,用于解决高重复频率对最大不模糊距离限制的技术问题,并实现低信噪比场景下的高精度测量。
2、本发明采用以下技术方案:
3、一种基于伪随机码调制的两步法激光测距方法,包括以下步骤:
4、s1、确定系统指标、测距场景和理论模型;
5、s2、基于步骤s1得到的系统指标、测距场景和理论模型选择粗测过程发送的伪随机码调制序列参数,得到粗测目标范围;
6、s3、基于步骤s1得到的系统指标、测距场景和理论模型和步骤s2得到的粗测目标范围选择细测过程发送的伪随机码调制序列参数,得到测距结果。
7、具体的,步骤s1中,测距系统设计需满足系统指标要求,测距场景考虑在低信噪比场景下对单个目标的测距场景,对不同信噪比下经过伪随机码信号调制的两步法测距结果进行分析;理论模型中,在信噪比0db的条件下,对[1,100]mhz的发送序列调制频率进行仿真模拟,提取低信噪比场景的回波信号。
8、进一步的,低信噪比选择[-10,-8,-6,-4,-2,0]db。
9、进一步的,伪随机码信号的最大不模糊距离d及分辨率δd为:
10、
11、
12、其中,c为测距环境中的光速大小,f为调制激光所用频率,n为所用伪随机码的阶数。
13、具体的,步骤s2具体为:
14、s201、将时间轴分为等间距的时间区间,接收端对接收到的光子数进行多次累加,当该时间区间内接受到的光子数大于2,该时间段接收有效,输出高电平,当该时间区间内接受到的光子数小于2时,该时间段接收无效,输出低电平,还原回波信号;
15、s202、对回波信号与发射信号作相关性运算,得到相关峰所在位置;
16、s203、经重复实验取平均,相关峰所在区间对应的飞行时间为t1,得到目标位置的粗测范围。
17、进一步的,步骤s203中,粗测结果d1为:
18、
19、其中,c为测距环境中的光速大小;
20、目标真实位置d0所在范围为:
21、d0∈(d1-δd1,d1+δd1)
22、其中,δd1为粗测序列的码元分辨率。
23、具体的,步骤s3具体为:
24、s301、根据测距量程要求,选择粗测伪随机码序列的阶数n1和调制频率flow,使该序列的最大不模糊距离d1大于量程范围;向目标物体发射多组n1阶频率flow的低频伪随机码信号调制激光,在发射调制激光时,接收端以码元宽度1/flow为时间单位对光子进行计数,按位循环累计多个周期后可在接收系统得到与时间相关光子累计直方图;设置光子数阈值,当单位时间内累计的光子数大于所设阈值,对应时间段接收有效,输出高电平,否则无效,输出低电平;
25、对阈值判别后的码元信号与发送信号作相关性运算,得到相关峰所在区间对应的飞行时间t1,得到目标距离的粗测结果d1,考虑到码元分辨率为δd1,所以目标真实位置所在范围d0∈(d1-δd1,d1+δd1);
26、s302、根据测距精度要求,选择细测伪随机码序列的调制频率fhigh,使该序列的分辨率δd2小于测距精度要求,根据粗测结果以及调制频率fhigh选择细测伪随机码序列的阶数n2,使细测序列的最大不模糊距离d2大于目标范围量程2δd1;向目标物体发射多组n2阶频率fhigh的高频伪随机码信号调制激光,得到细测过程的相关峰所在区间对应的飞行时间t2;根据粗测结果的目标范围得到飞行时间所包含的细测序列最大不模糊距离的整倍数,最终得到目标位置的细测结果d2。
27、进一步的,步骤s301中,调制激光的最大不模糊距离d2及探测精度δd2满足条件如下:
28、
29、
30、其中,c为测距环境中的光速大小,n2为细测过程伪随机码的阶数,fhigh为细测过程调制激光所用频率,d1为粗测过程所用伪随机码序列的最大不模糊距离。
31、进一步的,测距结果d2为:
32、
33、其中,c为测距环境中的光速大小,d1为,fhigh为细测过程调制激光所用频率,d1为粗测过程所用伪随机码序列的最大不模糊距离,d2为细测过程所用伪随机码序列的最大不模糊距离,t2为细测过程相关峰所在区间对应的飞行时间。
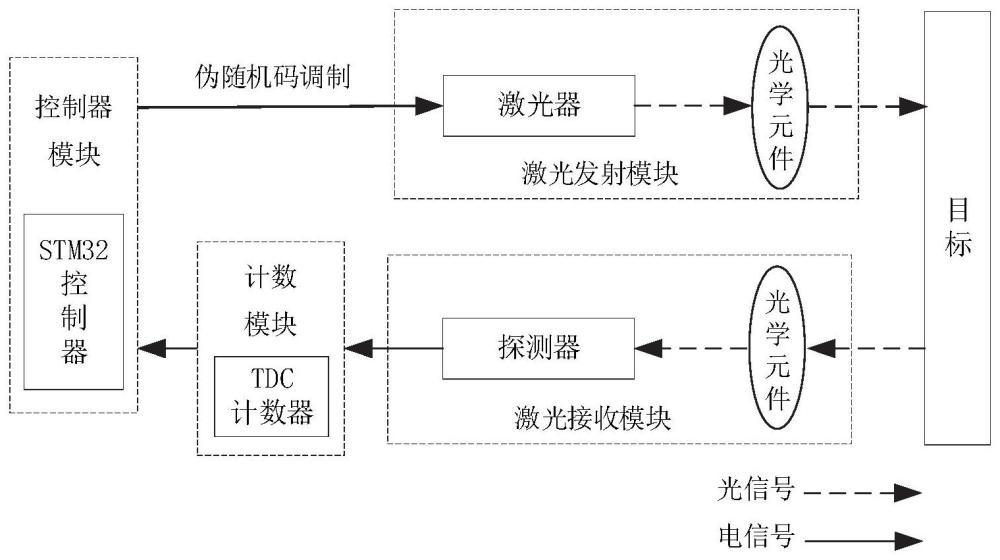
34、第二方面,本发明实施例提供了一种基于伪随机码调制的两步法激光测距系统,包括:
35、条件模块,确定系统指标、测距场景和理论模型;
36、粗测模块,基于条件模块得到的系统指标、测距场景和理论模型选择粗测过程发送的伪随机码调制序列参数,得到粗测目标范围;
37、细测模块,基于条件模块得到的系统指标、测距场景和理论模型和粗测模块得到的粗测目标范围选择细测过程发送的伪随机码调制序列参数,得到测距结果。
38、与现有技术相比,本发明至少具有以下有益效果:
39、一种基于伪随机码调制的两步法激光测距方法,伪随机码序列的频率和阶数的选择需要同时满足测距量程和测距精度的要求,较高的测距精度需要高调制频率,而调制频率提高序列阶数也必须增大以保证最大不模糊距离大于量程要求,如果精度要求较高,伪随机码阶数过大会导致码元个数过多,数据处理难度增加。因此本方法通过两部测距过程,先在满足测距量程的前提下通过粗测获得目标所在范围,然后在满足精度要求的前提下选择高频率低阶的伪随机码调制序列作为细测过程的发送序列,结合粗测结果,得到最终的测距结果,同时满足了测距量程和测距精度的指标要求。
40、进一步的,基于伪随机码调制的两步法的序列参数选择与系统指标有如下关系:①粗测过程要保证系统测距量程指标,所以粗测伪随机码调制序列的最大不模糊距离要大于测距量,对于n1阶频率flow的粗测序列,其最大不模糊距离d1>d0,码元分辨率考虑到粗测过程对精度要求不高,并且高调制频率会降低最大不模糊距离,因此选择较低的频率作为粗测伪随机码调制频率flow=1mhz,序列的阶数n1。做相关计算得到目标距离的粗测结果d1,码元分辨率为δd1,所以目标真实位置d0所在范围d0∈(d1-δd1,d1+δd1)。粗测过程的分辨率较大,不能满足系统的精度指标,需要细测过程进一步提高测距精度;②细测过程要保证系统测距精度指标,所以细测伪随机码调制序列的分辨率要小于测距精度要求,因此选择较高的频率作为细测伪随机码调制频率flow=100mhz,并且最大不模糊距离要大于粗测范围,避免得到多个测距结果。对于n2阶频率fhigh的细测序列,其最大不模糊距离d2>2δd2,码元分辨率δd2。确定了发送频率,则阶数n2。做相关计算得到细测过程的飞行时间t2。由于细测发送序列的调制频率较高,其最大不模糊距离d2小于测量量程d0,会出现距离模糊问题。将细测结果进行分解d2,其中,n为飞行时间所包含的细测序列最大不模糊距离的整倍数,t2为不模糊时间,根据粗测结果的目标范围可以得到n,则目标位置的细测结果为d2,测距误差err<δd2<err0。
41、进一步的,测距误差小于细测序列码元分辨率的前提是可以正确获得相关峰所在位置,而正确的相关峰位置依赖于能否正确还原回波信号,即就是探测器是否在有回波信号的区间内的响应,而在没有回波信号的区间内尽可能不响应。如果测距环境的信噪比较好,那么探测器更容易在有回波信号的区间探测到回波光子并响应。如果测距环境的信噪比较差,回波光子容易湮没于噪声光子中,无法保证探测器检测到的是回波光子还是噪声光子,回波信号还原难度更大,难以保证测距误差的指标要求。因此为了检验该方法在低信噪比环境下的可行性,考虑在低信噪比场景下对单个目标的测距场景,在不同低信噪比下进行基于伪随机码调制的两步法测距,分析测距结果是否满足指标要求。
42、进一步的,粗测过程的目的是确定目标所在大致范围。①设置粗测伪随机码序列参数:设置粗测伪随机码发送频率flow,根据伪随机码参数模型选择粗测伪随机码序列的阶数n1,以满足测距量程d0的指标要求;②发送粗测调制信号:向目标物体发射多组n1阶频率flow的低频伪随机码信号调制激光,码元为‘1’激光器发送一个脉冲,码元为‘0’激光器不发送脉冲;③接收端还原粗测回波信号:在发射调制激光时,接收端以码元宽度1/flow为时间单位对光子进行计数。根据接收光子数模型,得到各区间的接收光子数,接受光子数包含了噪声光子和回波光子,且服从泊松分布。探测器在每个时间区间内进行光子探测,若探测器响应,该时间区间加1,一组接收序列中,一个时间区间内探测器最多响应一次,按位循环累计多组周期后可在接收系统得到与时间相关光子累计直方图。设置光子数阈值,若该单位时间内累计的光子数大于所设阈值,那么该时间段接收有效,输出高电平,否则无效,输出低电平,完成粗测回波信号的还原;④做相关计算得到目标距离的粗测范围:m序列伪随机码与其本身具有很强的自相关性,而与其移位后产生的序列的互相关性极低且稳定,因此可以通过相关运算得到相关性最大值及其对应区间,该区间对应的时间大小即为粗测回波信号与发送信号的时延,及就是飞行时间,通过飞行时间计算出粗测结果,并根据码元分辨率得到目标真实位置d0所在范围。考虑到粗测序列的发送频率较低,其码元分辨率较大,所以粗测结果的误差较大,不能满足系统的精度指标要求,需要分辨率低的细测过程进一步得到更精确的测距结果。
43、进一步的,细测过程的目的是获得更精确的目标位置。①设置细测伪随机码序列参数:根据伪随机码参数模型选择细测伪随机码序列的调制频率fhigh,使该序列的分辨率δd2满足系统测距精度指标。根据伪随机码参数模型选择细测伪随机码序列的阶数n2,以满足细测量程要求;②发送细测调制信号:向目标物体发射多组n2阶频率fhigh的高频伪随机码信号调制激光,码元为‘1’激光器发送一个脉冲,码元为‘0’激光器不发送脉冲;③接收端还原细测回波信号:在发射调制激光时,接收端以码元宽度1/fhigh为时间单位对光子进行计数。根据接收光子数模型,得到各区间的接收光子数,接受光子数包含了噪声光子和回波光子,且服从泊松分布。探测器在每个时间区间内进行光子探测,若探测器响应,该时间区间加1,一组接收序列中,一个时间区间内探测器最多响应一次,按位循环累计多组周期后可在接收系统得到与时间相关光子累计直方图。设置光子数阈值,若该单位时间内累计的光子数大于所设阈值,那么该时间段接收有效,输出高电平,否则无效,输出低电平,完成细测回波信号的还原;④做相关计算得到目标位置的细测结果。通过计算相关性的最大值及其对应区间τm2得到细测回波信号与发送信号的时延,即飞行时间t2。由于细测发送序列的调制频率较高,其最大不模糊距离d2小于测量量程,出现距离模糊问题。将细测结果d2进行分解为d2,其中,n为飞行时间所包含的细测序列最大不模糊距离的整倍数,t2为不模糊时间,根据粗测结果的目标范围得到n,则目标位置的细测结果d2。因为细测结果的误差小于其码元分辨率,而码元分辨率与信号调制频率有关,因此设置足够高的细测序列的调制频率,以保证测距误差满足系统精度指标要求。
44、可以理解的是,上述第二方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
45、综上所述,本发明解决了高调制频率对最大不模糊距离的限制问题,使测距系统同时满足了测距量程和测距精度的指标要求,并且在低信噪比的环境中测距结果十分稳定,实现了远距离低信噪比高精度的测距要求。
46、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!