偏差补偿的遗忘递推最小二乘法的电池模型参数辨识方法
本发明属于电池模型参数辨识领域,尤其涉及偏差补偿的遗忘递推最小二乘法的电池模型参数辨识方法。
背景技术:
1、近年来,环境污染和化石能源短缺问题日益严重,随着新能源及储能装置的不断开发和利用,电动汽车行业得到了蓬勃的发展。锂离子电池具有能量密度和功率密度大的优势,同时兼顾循环寿命长、性能释放稳定等方面特性。锂离子动力电池是电动汽车的关键部件之一,为了确保电动汽车运行的安全性和稳定性,电池管理系统(battery managementsystem,bms)的开发与应用是必不可少的。
2、精确的锂电池模型可以反映锂电池复杂的工作过程,同时也可以为bms的状态估计提供依据,所以建立准确的电池模型对bms尤为重要。等效电路模型因其结构简单、辨识参数少、计算程度不复杂等特点,被广泛应用于实车bms中。在实际应用中,bms的电压和电流测量过程中都不可避免地存在噪声的干扰,系统识别中的噪声误差会影响输入和输出的测量精度。采样数据受到噪声干扰,不仅会影响参数辨识,更会直接影响到状态估计估计的精确度。现有的针对在采样数据受到噪声干扰的情况的算法,只单纯针对电流出现噪声或者电压出现噪声现象进行处理,很少出现针对电流和电压同时出现噪声现象进行研究。
技术实现思路
1、本发明目的在于提供一种偏差补偿的遗忘递推最小二乘法的电池模型参数辨识方法,以解决在汽车行驶过程中,电流电压信号会受到干扰的技术问题。
2、为实现上述目的,本发明的偏差补偿的遗忘递推最小二乘法的电池模型参数辨识方法的具体技术方案如下:
3、对于锂离子电池模型的准确估计会影响电池状态估计,进行影响到电动汽车整车的安全运行。但由于实际运行环境和传感器的误差影响,致使采样信号中含有随机噪声,从而导致模型估计精度降低。为解决由噪声引起的模型估计精度降低问题,本文引入了变量误差模型进行随机噪声的平均加权方差的估计,利用增广参数向量求出偏差项,并将方差估计偏差补偿到参数的估计结果上,最终得到参数的无偏估计值,以提升所建立模型的准确性,具体内容如下:
4、一种基于偏差补偿的等效电路模型方法其特征在于:包括以下步骤:
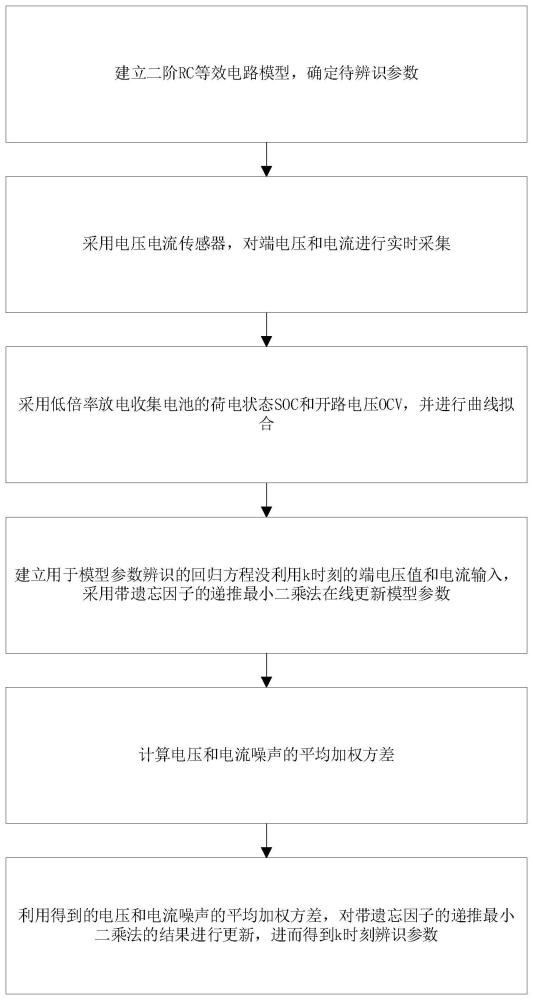
5、步骤s1、建立二阶等效电路模型,确定待辨识模型参数;
6、所述步骤s1包括以下步骤:
7、步骤s101、建立双极化等效电路模型,如图1所示,满足式(1):
8、
9、其中,uocv为电池开路电压(open circuit voltage,ocv),ut为电池工作时的端电压,u1为r1与c1构成的极化回路电压,u2为r2与c2构成的极化回路电压,q为电池的容量,soc表示电池的状态估计量,i为电池的工作电流,r0为电池的欧姆内阻,r1和c1为电池的浓差极化电阻和电容,r2和c2为电池的电化学极化电阻和电容;r0、r1、r2、c1和c2为所建模型的待辨识参数。
10、步骤s2、采用电压传感器和电流传感器,对k时刻负载端电压和端电流进行实时采集;
11、步骤s3、采用较低放电倍率收集电池的荷电状态soc和开路电压ocv,通过公式(3)拟合确定电池荷电状态soc和开路电压ocv的关系表达式;
12、
13、其中,v为电池的ocv值,k为拟合阶数,ri为拟合系数,zi为电池soc。
14、所述步骤s3包括以下步骤:
15、步骤s301、估计电池的soc采用的方法主要分为安时积分,深度学习方法,扩展卡尔曼滤波中的一种。
16、选择安时积分法对电池soc进行估计,
17、
18、其中,i(k)为k时刻的电流值,t为总时间。
19、步骤s302、为了得到ocv与soc的关系,将电池充满,并以c/20的方式进行放电,根据不同soc值记录ocv值;利用公式(3)得到ocv与soc的关系:
20、
21、其中,v为电池的ocv值,k为拟合阶数,ri为拟合系数,zi为电池soc。
22、步骤s4、建立用于模型参数辨识的离散欲回归方程,利用k时刻的端电压值和电流输入,采用带遗忘因子的递推最小二乘法在线更新模型参数。
23、所述步骤s4包括以下步骤:
24、步骤s401、构造用于模型辨识的离散域回归方程:
25、
26、其中,θ(k)为k时刻待辨识参数向量,θ(k)=[θ1(k)θ2(k)θs(k)θ4(k)θ5(k)],为k时刻的观测值矩阵,
27、步骤s402、构建辨识参数向量:
28、
29、其中,a=r0;b=τ1τ2;c=τ1+τ2;d=r0+r1+r2;e=r0(τ1+τ2)+r1τ2+r2τ1;τ1为c1值,τ2为c2值;
30、步骤s403、采用带遗忘因子的最小二乘法在线辨识模型参数向量:
31、初始化误差协方差p和参数辨识向量θ;
32、在线采集电压和电流数据,明确k时刻模型的输入和输出y(k),计算估计误差:
33、
34、式中,为未考虑偏差补偿的参数向量。
35、更新系统增益:
36、k(k)=p(k-1)φ(k)[λ+φ(k)tp(k-1)φ(k)]-1 (7)
37、未考虑偏差补偿的参数向量:
38、
39、更新误差协方差:
40、
41、其中,λ为遗忘因子,一般λ取值范围为0.95~1。
42、步骤s5、计算电压和电流中噪声的平均加权方差。
43、所述步骤s5包括以下步骤:
44、步骤s501、误差准则函数计算:
45、j(k)=λj(k-1)+λ[ε(k)]2[λ+φ(k)tp(k-1)φ(k)]-1 (10)
46、步骤s502、得到新的增广参数向量:
47、将
48、
49、的分母部分引入值为0的增广系数,即θ6=0,得到新的增广参数向量,见公式(12):
50、
51、步骤s503、引入辅助向量qt=(qt,0t),其中qt=[0 0 1];
52、步骤s504、将系统误差协方差矩阵p转化为矩阵形式
53、
54、步骤s505、由此得到求解平均加权方差参数的方程
55、
56、式中,als(k)和bls(k)分别为用带遗忘因子的递推最小二乘法算法估计的参数向量,即公式(12)中at(k)=als(k),bt(k)=bls(k),其中为电压和电流的平均加权方差参数。
57、步骤s6、依据所述步骤s5中得到的电压和电流噪声的平均加权方差,对所述步骤s4中的带遗忘因子的递归最小二乘法的结果进行更新,进而得到k时刻辨识参数。
58、所述步骤s6包括以下内容:
59、步骤s601、使用公式(15)对所述步骤s4中的带遗忘因子的递归最小二乘法的结果更新:
60、
61、式中,为参数估计的偏差项。
62、本发明的偏差补偿的遗忘递推最小二乘法的电池模型参数辨识方法具有以下优点:针对电压电流同时出现噪声的情况时,偏差补偿方法计算出两个随机噪声的平均方差,从而实现对参数向量的更新,减少噪声对模型估计精度的影响。采用双极化锂电池等效电路模型,相较于一阶等效电路模型,反映了电池的传荷过程和扩散过程,进一步提高了电池估计精度。
- 还没有人留言评论。精彩留言会获得点赞!