目标检测方法、装置、雷达及介质与流程
本发明属于雷达,尤其涉及一种目标检测方法、装置、雷达及介质。
背景技术:
1、随着社会和科技的发展,雷达目标检测技术,在生活中的应用逐渐广泛。毫米波雷达具有全天时全天候的工作能力,因此被广泛的应用于智能驾驶、交通、安防等领域。
2、雷达最大可测量的距离范围与发射信号带宽有关,带宽越大,距离分辨率越高,但对应的距离范围就小。带宽越小,距离分辨率越低,对应的距离范围就大。相关技术中,扩大距离范围的方式是增加发射信号带宽,带来的负面影响是距离分辨率降低,距离上更难分开多个目标。传统技术中,采用更高的雷达发射功率、更大的天线收发增益、更长的信号积累时间来扩大距离范围,但受到雷达成本或产品结构等多个方面的制约,在实现上有一定困难。
技术实现思路
1、有鉴于此,本发明实施例提供了一种目标检测方法、装置、雷达及介质,以在不降低距离分辨率的前提下,提高雷达最大可测量的距离范围。
2、本发明实施例的第一方面提供了一种目标检测方法,包括:
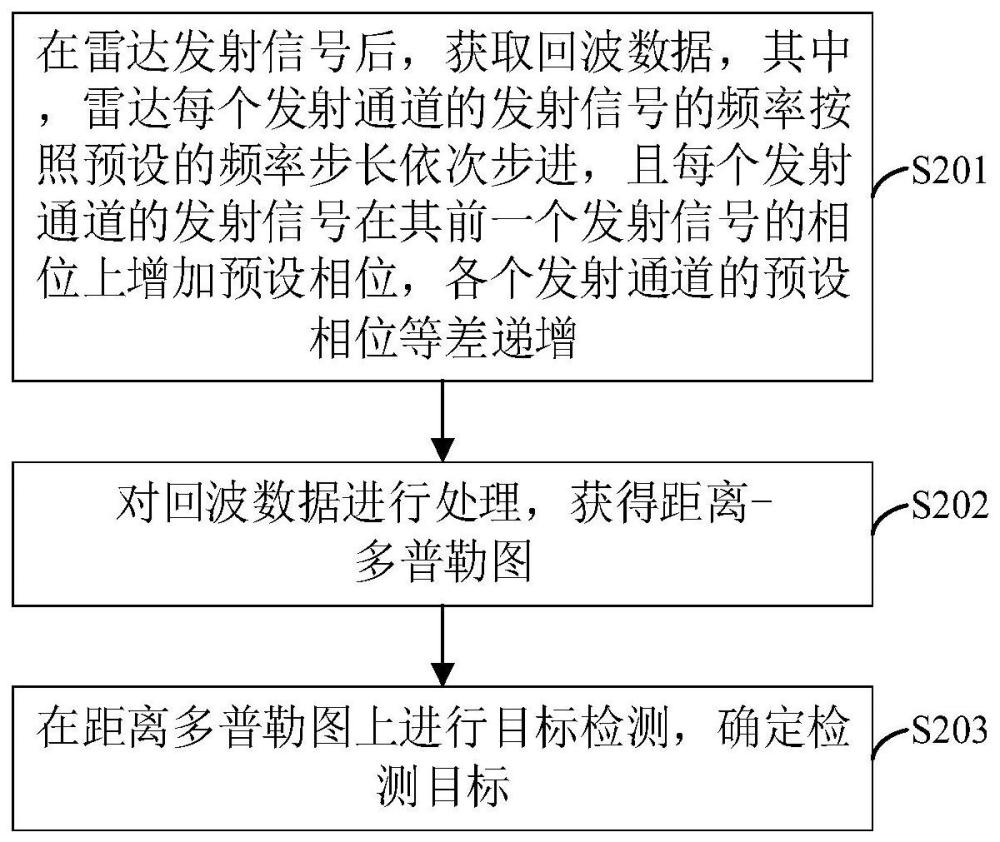
3、在雷达发射信号后,获取回波数据,其中,雷达每个发射通道的发射信号的频率按照预设的频率步长依次步进,且每个发射通道的发射信号在其前一个发射信号的相位上增加预设相位,各个发射通道的预设相位等差递增;
4、对回波数据进行处理,获得距离-多普勒图;
5、在距离-多普勒图上进行目标检测,确定检测目标。
6、结合第一方面,在第一方面的一种可能的实现方式中,在距离-多普勒图上进行目标检测,确定检测目标,包括:
7、确定距离-多普勒图中的各个真实子带的位置;
8、基于位置,在各个真实子带进行目标检测,获得各个真实子带内的目标点;
9、根据各个真实子带内的目标点,确定检测目标。
10、结合第一方面,在第一方面的一种可能的实现方式中,确定距离-多普勒图中的各个真实子带的位置,包括:
11、确定距离-多普勒图中子带的位置;
12、对于距离-多普勒图的任意一个距离单元,基于子带的位置,在任意一个子带选取一个目标点,并在剩余的子带中选取相同的目标点;
13、根据选取的各个目标点所在的多普勒通道,对选取的各个目标点进行排序并首尾连接,得到循环序列;
14、计算循环序列中每预设数目的目标点的幅值和,其中,预设数目根据雷达的发射通道的总数量确定;
15、确定幅值和最大的预设数目的目标点所在的子带为真实子带,根据子带的位置,获得距离-多普勒图中的各个真实子带的位置。
16、结合第一方面,在第一方面的一种可能的实现方式中,根据各个真实子带内的目标点,确定检测目标,包括:
17、遍历距离-多普勒图的每个距离单元的各个真实子带内的目标点,在每个距离单元内,将各个真实子带中的相同目标点作为一个目标点组;
18、对各个目标点组进行恒虚警检测;
19、根据通过恒虚警检测的目标点组内的各个目标点,计算检测目标的信息。
20、结合第一方面,在第一方面的一种可能的实现方式中,信息包括检测目标的真实速度;
21、根据通过恒虚警检测的目标点组内的各个目标点,计算检测目标的信息,包括:
22、根据通过恒虚警检测的目标点组内的各个目标点所在的多普勒通道,计算检测目标的当前相对速度;
23、对当前相对速度进行解模糊,获得检测目标的真实速度。
24、结合第一方面,在第一方面的一种可能的实现方式中,对回波数据进行处理,获得距离-多普勒图,包括:
25、对雷达每个接收通道的回波数据分别进行下变频和滤波后采样,得到每个接收通道对应的中频回波信号;
26、将各个接收通道对应的中频回波信号进行快时间维和慢时间维的加窗,以及快速傅里叶变换后,再进行非相参积累,得到距离-多普勒图。
27、结合第一方面,在第一方面的一种可能的实现方式中,每个发射通道的预设相位基于表达式:
28、确定;
29、其中,j为发射通道的序号,从1开始;为发射通道j对应的预设相位;n为发射通道的总数量;d为预设整数值,由发射通道的总数量确定。
30、结合第一方面,在第一方面的一种可能的实现方式中,对当前相对速度进行解模糊,获得检测目标的真实速度,包括:
31、获取检测目标所在的距离,以及雷达发射信号的重复周期、基准起始频率和频率步长;
32、根据当前相对速度、检测目标所在的距离,以及雷达发射信号的重复周期、基准起始频率和频率步长,确定目标在快时间维和慢时间维的频率;
33、基于雷达的模糊阶数和发射信号的重复周期,对目标在慢时间维的频率进行修正;
34、根据目标在快时间维的频率和修正后的慢时间维的频率,获得检测目标的真实速度。
35、结合第一方面,在第一方面的一种可能的实现方式中,根据当前相对速度、检测目标所在的距离,以及雷达发射信号的重复周期、基准起始频率和频率步长,确定目标在快时间维和慢时间维的频率,包括:
36、基于表达式f1=k·2r0/c+2vf0/c确定目标在快时间维的频率f1;
37、基于表达式f2=2vf0/c+2δfr0/c/prt确定目标在慢时间维的频率f2;
38、其中,v为当前相对速度,c为光速,f0为基准起始频率,prt为发射信号的重复周期,δf为频率步长;f1为快时间维频率;f2为慢时间维频率;r0为目标所在的距离。
39、结合第一方面,在第一方面的一种可能的实现方式中,基于雷达的模糊阶数和发射信号的重复周期,对目标在慢时间维的频率进行修正,包括:
40、基于表达式f2′=f2-n/prt对目标在慢时间维的频率f2进行修正;
41、其中,f2′为修正后的慢时间维的频率,n为模糊阶数。
42、本发明实施例的第二方面提供了一种目标检测装置,包括:
43、获取模块,用于在雷达发射信号后,获取回波数据,其中,雷达每个发射通道的发射信号的频率按照预设的频率步长依次步进,且每个发射通道的发射信号在其前一个发射信号的相位上增加预设相位,各个发射通道的预设相位等差递增;
44、处理模块,用于对回波数据进行处理,获得距离-多普勒图;以及,在距离-多普勒图上进行目标检测,确定检测目标。
45、本发明实施例的第三方面提供了一种雷达,包括:发射组件、接收组件和处理器;其中,发射组件用于发射信号,接收组件用于接收回波信号,处理器用于执行如上述第一方面或第一方面的任意一种实现方式中的方法。
46、本发明实施例的第四方面提供了一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,当处理器执行计算机执行指令时,实现如上述第一方面或第一方面的任意一种实现方式中的方法。
47、本发明实施例与现有技术相比存在的有益效果是:
48、本发明实施例采用线性步进调频和频分复用相结合的方式来处理发射信号。线性步进调频即雷达每个发射通道的发射信号的频率按照预设的频率步长依次步进;频分复用即每个发射通道的发射信号在其前一个发射信号的相位上增加预设相位,各个发射通道的预设相位等差递增。通过线性步进调频,提高雷达每帧发射信号的总带宽,从而提升雷达的距离分辨率。进一步结合频分复用,提高雷达最远作用距离,有效提高雷达目标的信噪比,降低虚警概率,改善目标检测效果。
- 还没有人留言评论。精彩留言会获得点赞!