车载导航方法、装置、汽车以及计算机可读存储介质与流程
本发明实施例涉及汽车,具体涉及一种车载导航方法、装置、汽车及计算机可读存储介质。
背景技术:
1、目前,室内ar(augmented reality)导航技术逐渐成熟,作为一示例的的,基于室内beacon设备,一种以电池供电的低功耗蓝牙设备,实现室内导航,具体的,在室内的多个安装点上安装beacon设备,每个beacon设备用于传递对应安装点的室内坐标信息和楼层信息,终端设备通过与一个或多个beacon设备连接后获取室内位置,再由终端设备通过自带的视频透视ar技术实现ar导航。但使用室内低功耗蓝牙beacon设备传递数据,有一定的距离限制,必须在室内建筑中大量铺设与安装,且由于其以电池供电,电池电量减弱或者耗尽后,蓝牙信号也会随之减弱和消失。另外,室内低功耗蓝牙beacon设备是否能够连接与其信号强弱有直接关联,蓝牙信号减弱会使得终端设备难以获取室内位置信息,或者导致终端设备获取到的室内信息时有时无的问题。作为另一示例的,基于室内定位系统gps的ar(增强现实augmented reality)导航,具体为通过在室内安装gps中继器,一种供电设备,使得在室内条件下终端设备也能够接收到gps信号,利用gps定位系统获取到室内的具体经度与纬度,再通过终端设备自带的视频透视式ar(增强现实augmented reality)技术从而实现ar(增强现实augmented reality)导航功能。但gps中继器有一定铺设成本且设备维护门槛高,且gps中继器不能够传递楼层信息。上述方式将降低车辆室内导航的准确性。
技术实现思路
1、鉴于上述问题,本发明实施例提供了一种车载导航方法、装置、汽车以及计算机可读存储介质,用于解决现有技术中车辆室内导航不准确的问题。
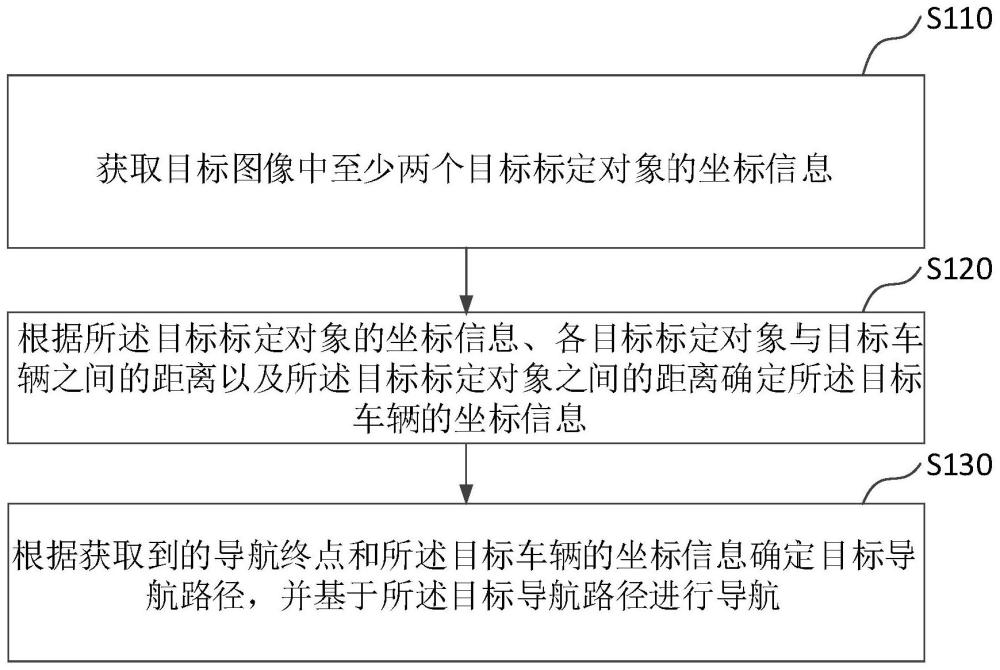
2、根据本发明实施例的一个方面,提供了一种车载导航方法,获取目标图像中至少两个目标标定对象的坐标信息;根据所述目标标定对象的坐标信息、各目标标定对象与目标车辆之间的距离以及所述目标标定对象之间的距离确定所述目标车辆的坐标信息;根据获取到的导航终点和所述目标车辆的坐标信息确定目标导航路径,并基于所述目标导航路径进行导航。
3、在一种可选的方式中,在所述根据所述目标标定对象的坐标信息、各目标标定对象与目标车辆之间的距离以及所述目标标定对象之间的距离确定所述目标车辆的坐标信息的步骤之前,所述方法还包括:通过双目相机获取两帧目标图像中同一标定对象的像素坐标;根据所述同一标定对象在不同帧目标图像中的像素坐标之间的距离差确定视差;根据所述双目相机之间的基准距离、焦距以及所述视差确定所述目标标定对象与所述目标车辆之间的距离。
4、在一种可选的方式中,所述根据所述双目相机之间的基准距离、焦距以及所述视差确定所述目标标定对象与所述目标车辆之间的距离的步骤,包括:计算所述双目相机之间的基准距离与焦距之间的乘积;将所述乘积与所述视差之间的比值作为所述目标标定对象与所述目标车辆之间的距离。
5、在一种可选的方式中,所述根据所述目标标定对象的坐标信息、各目标标定对象与目标车辆之间的距离以及所述目标标定对象之间的距离确定所述目标车辆的坐标信息的步骤,包括:建立平面坐标系,所述平面坐标系的横轴经过第一目标标定对象,所述平面坐标系的纵轴经过第二目标标定对象;根据所述第一目标标定对象与所述目标车辆之间的距离以及所述第二标定对象和所述目标车辆之间的距离确定所述第一目标标定对象与所述目标车辆到两个目标标定对象所在线段的第一垂心点之间的距离以及所述第二目标标定对象与所述第一垂心点之间的距离;根据所述第一目标标定对象与所述目标车辆之间的距离以及所述第一目标标定对象与所述第一垂心点之间的距离确定所述目标车辆到所述第一垂心点的距离;根据所述第一目标标定对象和所述第二目标标定对象之间的距离、所述第一目标标定对象的纵坐标确定所述第一垂心点到第二垂心点之间的距离,所述第二垂心点包括所述第一垂心点到所述横轴上的垂心点;根据所述第一垂心点到第二垂心点之间的距离确定所述目标车辆到第三垂心点的距离以及所述第三垂心点与所述第二目标标定对象之间的距离,所述第三垂心点包括所述目标车辆到所述横轴上的垂心点;根据所述第二目标标定对象的坐标信息、所述目标车辆到第三垂心点的距离以及所述第三垂心点与所述第二目标标定对象之间的距离确定所述目标车辆的坐标信息。
6、在一种可选的方式中,所述获取目标图像中至少两个目标标定对象的坐标信息的步骤,包括:从所述目标图像中识别到的初始标定对象中选取至少两个目标标定对象;根据所述目标图像中各目标标定对象的标定特征与预设标定对象库中各标定对象的标定特征之间的特征相似度,从所述预设标定对象库中选取匹配的标定对象;将所述匹配的标定对象的坐标信息作为所述目标标定对象的坐标信息。
7、在一种可选的方式中,所述根据获取到的导航终点和所述目标车辆的坐标信息确定目标导航路径的步骤,包括:根据所述目标车辆的坐标信息从导航地图中确定导航起点;根据所述导航起点和所述导航终点在所述导航地图中的位置确定初始导航路径;响应于所述目标对象对所述初始导航路径的选择操作,从所述初始导航路径中确定目标导航路径。
8、在一种可选的方式中,在所述获取目标图像中至少两个目标标定对象的坐标信息的步骤之前,所述方法还包括:获取视频流,所述视频流中包括若干初始图像;对各初始图像中的目标标定对象进行检测,得到各初始图像中的目标标定对象;响应于各初始图像中目标标定对象的数量大于或等于预设数值,则确定对应初始图像为目标图像。
9、根据本发明实施例的又一个方面,提供了一种车载导航装置,所述装置包括:获取模块,用于获取目标图像中至少两个目标标定对象的坐标信息;确定模块,用于根据所述目标标定对象的坐标信息、各目标标定对象与目标车辆之间的距离以及所述目标标定对象之间的距离确定所述目标车辆的坐标信息;导航模块,用于根据获取到的导航终点和所述目标车辆的坐标信息确定目标导航路径,并基于所述目标导航路径进行导航。
10、根据本发明实施例的又一方面,提供了一种汽车,包括存储器和处理器,所述处理器用于执行所述存储器中存储的程序指令,以实现上述任一项所述的车载导航方法。
11、根据本发明实施例的又一方面,提供了一种计算机可读存储介质,其上存储有程序指令,所述程序指令被处理器执行时实现上述任一项所述的车载导航方法。
12、本发明实施例通过获取目标图像中至少两个目标标定对象的坐标信息;根据目标标定对象的坐标信息、各目标标定对象与目标车辆之间的距离以及目标标定对象之间的距离确定目标车辆的坐标信息;根据获取到的导航终点和目标车辆的坐标信息确定目标导航路径,并基于目标导航路径进行导航。由此可知相较于目前由于室内beacon设备传递信息的距离限制导致定位不准确的问题,以及室内安装gps中继器无法传递楼层信息而导致定位不准确的问题来说,本技术实施例能够根据目标图像中目标标定对象的坐标信息、目标标定对象与目标车辆之间的距离以及目标标定对象之间的距离确定目标车辆的坐标信息,进而根据目标车辆的坐标信息进行车辆导航,提高了车辆室内导航的准确性。
13、上述说明仅是本发明实施例技术方案的概述,为了能够更清楚了解本发明实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本发明实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!