一种退役电池参数识别方法、装置、设备及存储介质与流程
本发明涉及电池检测,尤其涉及一种退役电池参数识别方法、装置、设备及存储介质。
背景技术:
1、退役电池的运行参数对电池的安全运行起着至关重要的作用,例如电池的荷电状态soc值和健康状态soh值,但这些参数无法直接测量。这些参数的测量依赖于对其他相关电池参数的识别。
2、阻抗谱分析和外特性拟合是两种典型的电池参数测量方法。目前,电池阻抗谱法可以准确测量电池阻抗参数,但是这种方法很难完全在线跟踪参数的变化。因此,电池阻抗谱法不适用于非线性、时变的电池参数在线辨识。外特性拟合方法采用确定的等效模型结构来拟合电池外特性,具有在线实现的潜力。例如,最小二乘法、支持向量机、卡尔曼滤波、粒子群算法、计算智能技术、遗传算法等都是以电池瞬态行为的统计特性为优化原则,寻找最合适的、能够很好拟合电池瞬态特性的电池参数。但是由于受到算法复杂度的制约,最小二乘法、回归算法和卡尔曼滤波算法等算法难以在线识别非线性参数和在时间上变化太大的参数。而粒子群算法应用于电池参数辨识存在两个问题:需要同时辨识多个参数,需要存储大量的实验数据;大量的数据计算会大大降低算法的计算速度,难以实现真实的在线识别。因此,亟需开发一种能够快速跟踪退役电池参数的识别算法。
技术实现思路
1、针对上述缺陷,本发明提供一种退役电池参数识别方法、装置、设备及存储介质,能够快速跟踪退役电池的参数。
2、本发明实施例提供一种退役电池参数识别方法,所述方法包括:
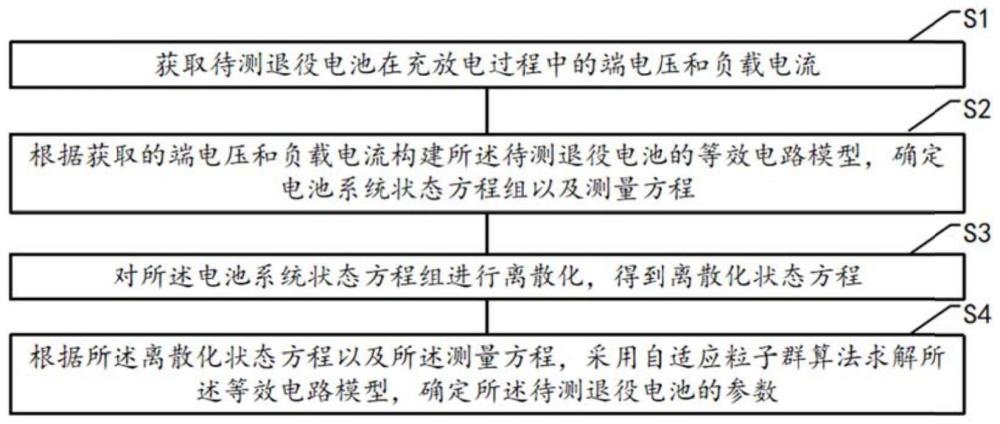
3、获取待测退役电池在充放电过程中的端电压和负载电流;
4、根据获取的端电压和负载电流构建所述待测退役电池的等效电路模型,确定电池系统状态方程组以及测量方程;
5、对所述电池系统状态方程组进行离散化,得到离散化状态方程;
6、根据所述离散化状态方程以及所述测量方程,采用自适应粒子群算法求解所述等效电路模型,确定所述待测退役电池的参数。
7、进一步地,所述电池系统状态方程组具体为:
8、
9、所述测量方程为:
10、其中,uv(t)为电池系统的端电压,il(t)为电池系统的负载电流,r0为欧姆内阻,c1、c2为极化电容;r1、r2为极化电阻,u1(t)、u2(t)为极化电阻r1、r2对应的端电压;uoc为电池开路电压;u为电池端电压;i为电池负载电流,uv,k为k时刻电池系统的输出电压,uoc,k、u1,k以及u2,k为系统的状态变量。
11、作为一种优选方案,所述离散化状态方程为:
12、其中,u1,k和u2,k分别为电容c1和c2在k时刻的电压;il,k为k时刻系统的输入电流,u1,k-1和u2,k-1分别为电容c1和c2在k-1时刻的电压;il,k-1为k-1时刻系统输入电流;1、2、β1及β2为系统的状态变量r1、r2为极化电阻,t为温度。
13、优选地,所述根据所述离散化状态方程以及所述测量方程,采用自适应粒子群算法求解所述等效电路模型,确定所述待测退役电池的参数,具体包括以下步骤:
14、步骤1,进行参数初始化,设置迭代次数、种群规模、初始位置以及初始速度;
15、步骤2,根据预设的动态惯性更新模型更新惯性权重;
16、步骤3,根据预设的动态学习因子更新模型更新学习因子;
17、步骤4,对所述等效模型中各个参数设置参数边界;
18、步骤5,根据得到的惯性权重和学习因子和预设的速度更新模型更新每个粒子的速度;
19、步骤6,根据得到的粒子的速度和预设的位置更新模型更新每个粒子的位置;
20、步骤7,根据适应度函数计算每个粒子的函数适应值;
21、步骤8,更新每个粒子的历史最优位置和群体的全局最优位置;
22、步骤9,判断得到的历史最优位置和全局最优位置是否满足终止条件;
23、若否,返回步骤2;
24、若是,执行步骤10;
25、步骤10,将得到的全局最优位置作为所述待测退役电池的参数输出。
26、优选地,所述动态惯性更新模型为:
27、其中,w为惯性权重,wmax为初始惯性权重,wmin为迭代最终惯性权重,nmax为迭代最大次数,n为当前迭代次数,l为经验系数。
28、作为一种优选方案,所述动态学习因子更新模型为:
29、其中,cimax为个体学习因子最大值,cgmax为群体学习因子最大值,cimin为个体学习因子最小值,cgmin为群体学习因子最小值,nmax为迭代最大次数,n为当前迭代次数,ci为个体i的学习因子,cg为群体的学习因子。
30、优选地,所述速度更新模型为vi,n=wvi,n-1+c1r1(pi,n-xi,n)+c2r2(gn-xi,n);
31、所述位置更新模型为xi,n+1=xi,n+vi,n;
32、其中,vi,n表示粒子i迭代第n次时的速度,vi,n-1表示粒子i迭代第n-1次时的速度,w为惯性权重,r1、r2是范围在0~1之间的随机数,pi,n表示粒子i截止第n次迭代最佳位置,gn表示所有粒子截止第n次迭代最佳位置,xi,n表示粒子i迭代第n次时的位置,xi,n+1表示粒子i迭代第n+1次时的位置,c1、c2。
33、本发明实施例还提供一种退役电池参数识别装置,所述装置包括:
34、数据获取模块,用于获取待测退役电池在充放电过程中的端电压和负载电流;
35、模型构建模块,用于根据获取的端电压和负载电流构建所述待测退役电池的等效电路模型,确定电池系统状态方程组以及测量方程;
36、离散化模块,用于对所述电池系统状态方程组进行离散化,得到离散化状态方程;
37、参数求解模块,用于根据所述离散化状态方程以及所述测量方程,采用自适应粒子群算法求解所述等效电路模型,确定所述待测退役电池的参数。
38、优选地,所述电池系统状态方程组具体为:
39、
40、所述测量方程为:
41、其中,uv(t)为电池系统的端电压,il(t)为电池系统的负载电流,r0为欧姆内阻,c1、c2为极化电容;r1、r2为极化电阻,u1(t)、u2(t)为极化电阻r1、r2对应的端电压;uoc为电池开路电压;u为电池端电压;i为电池负载电流,uv,k为k时刻电池系统的输出电压,uoc,k、u1,k以及u2,k为系统的状态变量。
42、作为一种优选方案,所述离散化状态方程为:
43、
44、其中,u1,k和u2,k分别为电容c1和c2在k时刻的电压;il,k为k时刻系统的输入电流,u1,k-1和u2,k-1分别为电容c1和c2在k-1时刻的电压;il,k-1为k-1时刻系统输入电流;1、2、β1及β2为系统的状态变量r1、r2为极化电阻,t为温度。
45、优选地,所述参数求解模块具体用于执行以下步骤:
46、步骤1,进行参数初始化,设置迭代次数、种群规模、初始位置以及初始速度;
47、步骤2,根据预设的动态惯性更新模型更新惯性权重;
48、步骤3,根据预设的动态学习因子更新模型更新学习因子;
49、步骤4,对所述等效模型中各个参数设置参数边界;
50、步骤5,根据得到的惯性权重和学习因子和预设的速度更新模型更新每个粒子的速度;
51、步骤6,根据得到的粒子的速度和预设的位置更新模型更新每个粒子的位置;
52、步骤7,根据适应度函数计算每个粒子的函数适应值;
53、步骤8,更新每个粒子的历史最优位置和群体的全局最优位置;
54、步骤9,判断得到的历史最优位置和全局最优位置是否满足终止条件;
55、若否,返回步骤2;
56、若是,执行步骤10;
57、步骤10,将得到的全局最优位置作为所述待测退役电池的参数输出。
58、优选地,所述动态惯性更新模型为:
59、其中,w为惯性权重,wmax为初始惯性权重,wmin为迭代最终惯性权重,nmax为迭代最大次数,n为当前迭代次数,l为经验系数。
60、优选地,所述动态学习因子更新模型为:
61、其中,cimax为个体学习因子最大值,cgmax为群体学习因子最大值,cimin为个体学习因子最小值,cgmin为群体学习因子最小值,nmax为迭代最大次数,n为当前迭代次数,ci为个体i的学习因子,cg为群体的学习因子。
62、优选地,所述速度更新模型为vi,n=wvi,n-1+c1r1(pi,n-xi,n)+c2r2(gn-xi,n);
63、所述位置更新模型为xi,n+1=xi,n+vi,n;
64、其中,vi,n表示粒子i迭代第n次时的速度,vi,n-1表示粒子i迭代第n-1次时的速度,w为惯性权重,r1、r2是范围在0~1之间的随机数,pi,n表示粒子i截止第n次迭代最佳位置,gn表示所有粒子截止第n次迭代最佳位置,xi,n表示粒子i迭代第n次时的位置,xi,n+1表示粒子i迭代第n+1次时的位置,c1、c2。
65、本发明实施例还提供一种终端设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现如上述实施例中任意一项所述的退役电池参数识别方法。
66、本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如上述实施例中任意一项所述的退役电池参数识别方法。
67、本发明提供的一种退役电池参数识别方法、装置、设备及存储介质,通过获取待测退役电池在充放电过程中的端电压和负载电流;根据获取的端电压和负载电流构建所述待测退役电池的等效电路模型,确定电池系统状态方程组以及测量方程;对所述电池系统状态方程组进行离散化,得到离散化状态方程;根据所述离散化状态方程以及所述测量方程,采用自适应粒子群算法求解所述等效电路模型,确定所述待测退役电池的参数。本技术能够快速跟踪退役电池的参数。
- 还没有人留言评论。精彩留言会获得点赞!