一种全对称结构陀螺刚度误差校正的装置及方法与流程
本发明涉及陀螺仪,尤其涉及一种全对称结构陀螺刚度误差校正的装置及方法。
背景技术:
1、基于科氏效应的全对称结构陀螺,核心部件为全对称的敏感结构,如环形、蝶形及半球形等,由于其存在不可避免的结构制造缺陷,导致陀螺具有较大的刚度误差,表现在两方面:一方面谐振子的刚度主轴方向相对激励/检测电极轴向发生偏转,导致检测模态存在来自驱动模态的刚度耦合误差,该误差会通过相位误差传递到角速率解算通道,影响陀螺测量精度;另一方面,两个刚度主轴的频率不一致,存在一定的频差,对于高q值陀螺表头而言,将极大的降低表头的机械灵敏度,进而降低陀螺信噪比,恶化陀螺精度。为此,需要采取必要措施,对谐振子的刚度耦合误差进频率误差进行校正。
2、为达到上述目的,通常有两种方式,一种是在表头机械结构制造完成后,通过飞秒激光、离子束等物理方式在谐振子特定位置去除或增加一定质量,直接对结构进行修正,以实现对谐振子的调平,这种方式对谐振子的损伤不可逆,且采用的设备十分复杂、效率非常低,目前仅适用于小批量表头的校正;另一种是在不改变表头原有制造误差的情况下,通过在固定电极上施加直流电压,对谐振子产生一定的静电力,即静电负刚度效应,实现对刚度误差的校正,这种方式操作简单,对谐振子无损伤,适用于批量标校。
3、在申请号为201310746a43.8,名称为“一种环形陀螺仪的静电调整方法及静电调整系统”的中国专利申请中介绍了一种环形结构陀螺仪静电调整的方法,并给出了施加的电压的计算公式。然而,此专利给出的调节方法存在如下缺点:(1)效率较低,需要非常高的电压才能达到理想的调节效果,不利于asic实现;(2)激励和检测信号均为单路信号,易受环境因素干扰,引入较大的环境噪声;(3)计算过程复杂,操作步骤繁琐,而且理论上调节的频差精度就有限,无法实现高精度模态匹配,不适用于高q值陀螺。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种全对称结构陀螺刚度误差校正的装置及方法,能够实现对表头制造缺陷导致的刚度误差进行批量标校,提高陀螺精度和生产效率。
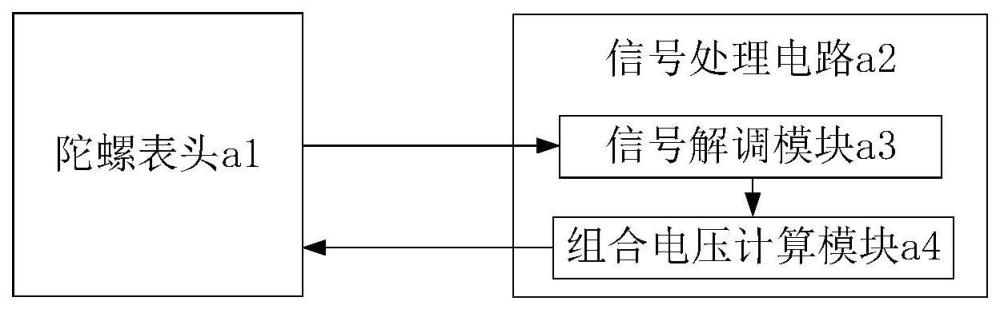
2、一种全对称结构陀螺刚度误差校正的装置,包括:陀螺表头和信号处理电路;所述陀螺表头包括全对称敏感结构、驱动轴两侧配对的第一电极组和第二电极组及检测轴两侧配对的第三电极组和第四电极组;所述信号处理电路包括信号解调模块和组合电压计算模块;所述信号解调模块的输入端与所述陀螺表头的输出端连接,输出端与所述组合电压计算模块连接,用于对陀螺检测信号进行解调,得到所述陀螺表头的刚度耦合误差和频率误差,并为所述组合电压计算模块提供控制输入量;所述组合电压计算模块的输入端与所述信号解调模块连接,输出端连接至所述陀螺表头,通过对输入误差信息进行解调,得到对应的反馈控制电压,并输出至所述陀螺表头的电极上,形成陀螺系统的闭环控制。
3、在其中一个实施例中,所述全对称敏感结构为环形、蝶形或半球形,为所述陀螺表头的核心振动组件。
4、在其中一个实施例中,所述陀螺表头内圈和外圈分别包括十六个电极,以驱动轴为起点,内圈按照逆时针方向依次为第一至第十六电极,外圈按照逆时针方向依次为第十七至第三十二电极。
5、在其中一个实施例中,所述第一电极组和第二电极组分别位于驱动轴两侧,每一组包含八个电极,间隔90°分布于所述全对称敏感结构的内圈和外圈;所述第一电极组包括第一、五、九、十三、十七、二十一、二十五、二十九共八个电极;所述第二电极组包括第二、六、十、十四、十八、二十二、二十六、三十共八个电极;所述第三电极组和第四电极组分布于检测轴两侧,每一组包含八个电极,间隔90°分布于所述全对称敏感结构的内圈和外圈;所述第三电极组包括第三、七、十一、十五、十九、二十三、二十七、三十一共八个电极;所述第四电极组包括第四、八、十二、十六、二十、二十四、二十八、三十二共八个电极。
6、在其中一个实施例中,所述装置包括有驱动模态和检测模态两种模态;其中,驱动模态激励正电极为第一、二电极,激励负电极为第五、六电极;驱动模态检测正电极为第九、十电极,检测负电极为第十三、十四电极;检测模态激励正电极为第三、四电极,激励负电极为第七、八电极;检测模态检测正电极为第十一、十二电极,检测负电极为第十五、十六电极;所述激励和检测信号均为正弦电压,与刚度误差校正直流电流叠加后施加到对应电极上。
7、一种全对称结构陀螺刚度误差校正的方法,采用如上所述的一种全对称结构陀螺刚度误差校正的装置,包括以下步骤:信号处理电路根据表头驱动、检测频率的大小情况,选择第一、二、三、四电极组中的前两组或后两组电极进行刚度误差校正;设置频率调节初始值;调节刚度耦合误差校正量,并观测信号解调电路解调得到的正交信号变化趋势,计算正交误差,在所述正交误差不为零时,再次调节所述刚度耦合误差校正量,在所述正交误差为零时,进入下一步;调节频率误差校正量,并观测信号解调电路解调得到的频差信号变化趋势;计算测试频差,在所述测试频差与设定值不相等时再次调节所述频率误差校正量,在所述测试频差与设定值相等时完成误差校正。
8、在其中一个实施例中,所述信号处理电路根据表头驱动、检测频率的大小情况,选择第一、二、三、四电极组中的前两组或后两组电极进行刚度误差校正,包括:在驱动轴频率大于检测轴频率时,选择第一电极组和第二电极组施加刚度误差校正电压,第三、四电极组接地;在检测轴频率大于驱动轴频率时,选择第三电极组和第四电极组施加刚度误差校正电压,第一、二电极组接地;且两组电极上施加的所述校正电压与刚度误差之间有:
9、
10、
11、其中,m为刚度耦合误差校正量,即检测端正交信号;n为频率误差校正量;v1为第一组电极上施加的直流电压;v2为第二组电极上施加的直流电压;α为电压与误差校正量之间的比例系数。
12、在其中一个实施例中,在所述刚度耦合误差校正量调节完毕后,固定全对称敏感结构内圈电极上的直流电压,动态调节所述全对称敏感结构外圈电极上的直流电压。
13、相比于现有技术,本发明的优点及有益效果在于:陀螺表头和信号处理电路,陀螺表头包括有全对称敏感结构、驱动轴两侧配对的第一电极组和第二电极组及检测轴两侧配对的第三电极组和第四电极组,信号处理电路包括有信号解调模块和组合电压计算模块,信号解调模块的输入端与陀螺表头的输出端连接,输出端与组合电压计算模块连接,用于对陀螺检测信号进行解调,得到陀螺表头的刚度耦合误差和频率误差,并为组合电压计算模块提供控制输入量;组合电压计算模块的输入端与信号解调模块连接,输出端连接至陀螺表头,通过对输入误差信息进行解调,得到对应的反馈控制电压,并输出至陀螺表头的电极上,形成陀螺系统的闭环控制,从而能够采用差分激励、检测的方式,提高信号共模抑制比,进而降低陀螺输出噪声;充分利用全对称结构表头的所有电极,实现刚度误差调节效率的最大化,减小直流电压幅值;还能够实现完全模态匹配,适用于对频差要求高的高q值陀螺;提高了陀螺的整体性能,适用范围广,能够用于大批量生产标校。
- 还没有人留言评论。精彩留言会获得点赞!