单目全景环视形变监测方法、装置及计算机设备与流程
本发明涉及机器视觉算法,更具体地说是指单目全景环视形变监测方法、装置及计算机设备。
背景技术:
1、随着经济的发展,市场对基于视觉的形变监测技术需求将原来越大,特别是在安全预警、质量控制领域,而且随着机器视觉算法技术的发展,越来越多的研究人员将其应用到安全监测,特别是基于机器视觉的非接触式形变监测方向。目前常用的技术有基于模板即自然靶标或人工靶标的特征点匹配或模板匹配算法,其技术流程包括:在监测结构体上选点,并布设监测靶;根据经验,在监测体对面固定安装监测设备,并尽量兼顾各监测点;提取初始帧各靶标位置信息及计算尺度转换因子;识别监测帧的像素形变量,并基于尺度因子转化为实际物理形变量。
2、但是,上述的现有技术方案虽然能够一定程度的弥补接触式形变监测技术的不足,但系统使用条件相对严苛,缺乏灵活性,适用性相对局限,要求监测设备的绝对固定,一旦安装调试完成,其位姿将不得再变动;而且在固定位姿下进行监测,监测区域受限,要监测不同方位和更大区域往往要使用多台设备,使得数据不连续,同时增加了成本;通常为了一机兼顾多点,往往需要牺牲整体的成像质量,从而影响精度;越是远离光轴的监测点系统误差会越大。
3、因此,有必要设计一种新的方法,实现解决现有单目监测系统位姿固定不变,使得使用条件严苛、缺乏灵活性的问题,且拓展了监测系统的视野,确保监测精度。
技术实现思路
1、本发明的目的在于克服现有技术的缺陷,提供单目全景环视形变监测方法、装置及计算机设备。
2、为实现上述目的,本发明采用以下技术方案:单目全景环视形变监测方法,包括:
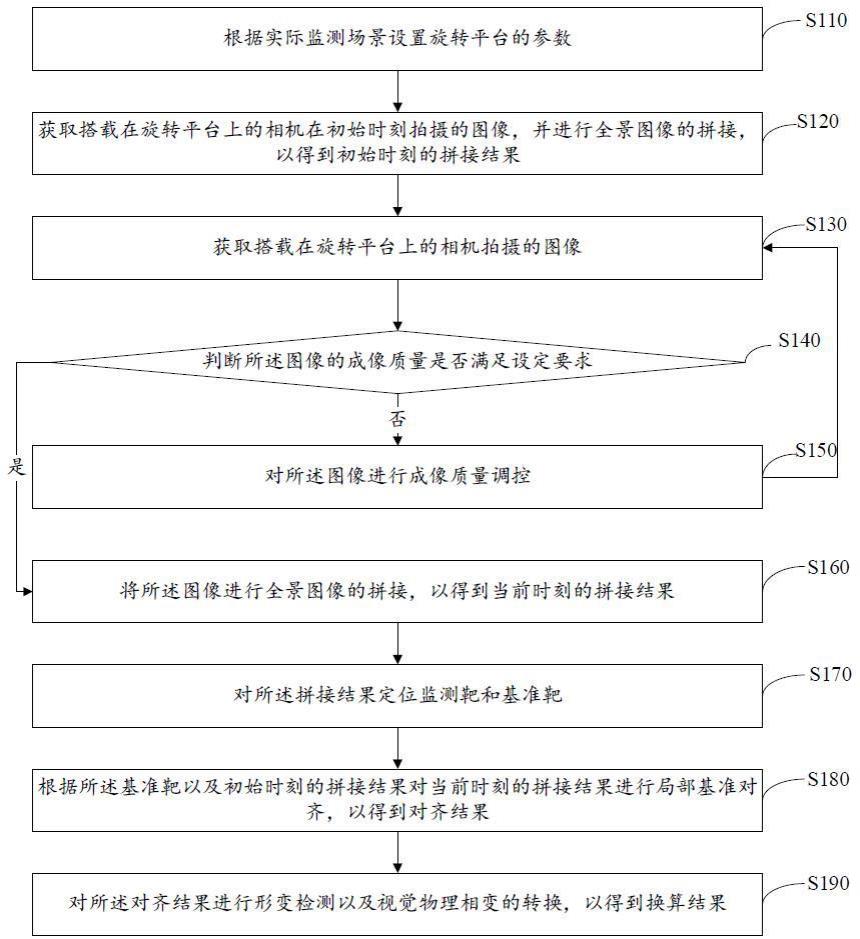
3、根据实际监测场景设置旋转平台的参数;
4、获取搭载在旋转平台上的相机在初始时刻拍摄的图像,并进行全景图像的拼接,以得到初始时刻的拼接结果;
5、获取搭载在旋转平台上的相机拍摄的图像;
6、判断所述图像的成像质量是否满足设定要求;
7、若所述图像的成像质量不满足设定要求,则对所述图像进行成像质量调控,并再次执行所述获取搭载在旋转平台上的相机拍摄的图像;
8、若所述图像的成像质量满足设定要求,则将所述图像进行全景图像的拼接,以得到当前时刻的拼接结果;
9、对所述拼接结果定位监测靶和基准靶;
10、根据所述基准靶以及初始时刻的拼接结果对当前时刻的拼接结果进行局部基准对齐,以得到对齐结果;
11、对所述对齐结果进行形变检测以及视觉物理相变的转换,以得到换算结果。
12、其进一步技术方案为:所述判断所述图像的成像质量是否满足设定要求,包括:
13、基于目标检测算法定位所述图像内的有效的靶标位置;
14、计算有效的靶标位置构成的检测框的像素得分;
15、确定所述图像的各靶标的轮廓面积保持率和轮廓圆拟合度;
16、将所述像素得分、轮廓面积保持率和轮廓圆拟合度进行加权求和,以得到图像局部分值;
17、判断所述图像局部分值是否小于设定阈值;
18、若所述图像局部分值小于设定阈值,则确定所述图像的成像质量不满足设定要求;
19、若所述图像局部分值不小于设定阈值,则确定所述图像的成像质量满足设定要求。
20、其进一步技术方案为:所述确定所述图像的各靶标的轮廓面积保持率和轮廓圆拟合度,包括:
21、识别所述检测框内有效靶标的靶标圆型外轮廓;
22、计算所述靶标圆型外轮廓的轮廓圆拟合度;
23、计算所述靶标圆型外轮廓的轮廓像素面积保持率。
24、其进一步技术方案为:所述计算所述靶标圆型外轮廓的轮廓圆拟合度,包括:
25、计算各靶标的圆轮廓像素面积;
26、计算下一帧图像的各靶标的圆轮廓像素面积;
27、计算下一帧图像的各靶标的轮廓的最小外接矩,并计算所述最小外接矩的对角线交点;
28、计算下一帧图像的所获取轮廓点集到对角线交点的距离,以得到距离数组;
29、计算距离数组的变异系数;
30、根据所述变异系数确定所述靶标圆型外轮廓的轮廓圆拟合度。
31、其进一步技术方案为:所述计算距离数组的变异系数,包括:
32、采用计算距离数组的变异系数,其中,为距离数组的标准差,为距离数组的均值。
33、其进一步技术方案为:所述根据所述基准靶以及初始时刻的拼接结果对当前时刻的拼接结果进行局部基准对齐,以得到对齐结果,包括:
34、提取初始时刻的拼接结果和当前时刻的拼接结果中的基准靶局部图片的sift特征点;
35、采用暴力匹配算法对所述sift特征点进行匹配;
36、提取匹配距离符合要求的sift特征点,并计算当前时刻的拼接结果到初始时刻的拼接结果的变换矩阵;
37、使用所述变换矩阵对当前时刻的拼接结果进行透视变换,以得到对齐结果。
38、其进一步技术方案为:所述对所述对齐结果进行形变检测以及视觉物理相变的转换,以得到换算结果,包括:
39、提取初始时刻的拼接结果中各监测点的灰度特征、表观边缘特征和特征点,以得到初始特征;
40、计算初始时刻的像素位置信息;
41、提取当前时刻的拼接结果中的灰度特征、表观边缘特征和特征点,以得到当前特征;
42、根据所述初始特征以及当前特征进行前后帧匹配,计算像素偏移量;
43、根据靶标实际尺寸以及所述当前时刻的拼接结果中的靶标像素尺寸确定换算值;
44、将所述像素偏移量乘以换算值,以得到换算结果。
45、本发明还提供了单目全景环视形变监测装置,包括:
46、设置单元,用于根据实际监测场景设置旋转平台的参数;
47、初始结果确定单元,用于获取搭载在旋转平台上的相机在初始时刻拍摄的图像,并进行全景图像的拼接,以得到初始时刻的拼接结果;
48、图像获取单元,用于获取搭载在旋转平台上的相机拍摄的图像;
49、判断单元,用于判断所述图像的成像质量是否满足设定要求;
50、调控单元,用于若所述图像的成像质量不满足设定要求,则对所述图像进行成像质量调控,并再次执行所述获取搭载在旋转平台上的相机拍摄的图像;
51、拼接单元,用于若所述图像的成像质量满足设定要求,则将所述图像进行全景图像的拼接,以得到当前时刻的拼接结果;
52、定位单元,用于对所述拼接结果定位监测靶和基准靶;
53、对齐单元,用于根据所述基准靶以及初始时刻的拼接结果对当前时刻的拼接结果进行局部基准对齐,以得到对齐结果;
54、转换单元,用于对所述对齐结果进行形变检测以及视觉物理相变的转换,以得到换算结果。
55、本发明还提供了一种计算机设备,所述计算机设备包括存储器及处理器,所述存储器上存储有计算机程序,所述处理器执行所述计算机程序时实现上述的方法。
56、本发明还提供了一种存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法。
57、本发明与现有技术相比的有益效果是:本发明通过将相机装载在旋转平台上,对相机拍摄的图像进行成像质量调控,当成像质量满足要求时,进行全景图像的拼接和局部基准对齐以及形变检测和视觉物理相变的转换,实现解决现有单目监测系统位姿固定不变,使得使用条件严苛、缺乏灵活性的问题,且拓展了监测系统的视野,确保监测精度。
58、下面结合附图和具体实施例对本发明作进一步描述。
- 还没有人留言评论。精彩留言会获得点赞!