一种FMCW激光测距光源扫频带宽扩展系统和方法
本发明涉及激光测距领域,提供了一种fmcw激光测距光源扫频带宽扩展系统和方法,用于高精度的激光测距、激光雷达及三维成像应用场景,有效扩大扫频带宽,消除大范围扫频带来的功率不均衡、频率调制非线性及频谱拼接产生相位误差的问题,从而降低激光器调谐引入的测量误差,提高测距精度,应用于激光雷达、激光测距、激光三维扫描领域。
背景技术:
1、目前在激光测距领域中,脉冲法和相位法是常用的方法,但是脉冲法测距的测量分辨力受限于电子器件的带宽,分辨率仅为毫米量级,而相位法测距存在2π缠绕模糊度问题,调频连续波激光绝对测距可以有效地解决2π缠绕模糊度问题,且精度可以达到微米量级。在实际应用中,通常fmcw激光测距需要理想线性扫频以反演距离。
2、受限于器件本身的光电特性,激光器在经过频率调制后所得光束的扫频带宽有限,这导致了测距系统分辨率有限。为了进一步提高分辨率,需要增加系统产生光束的扫频带宽,目前增加扫频带宽的方法通常为更换能够提供更宽扫频带宽的激光器,这种方法提高成本且不易找到相应器件。本发明为了解决现有的用于距离测量的基于fmcw技术的激光雷达信号测量方法在受限于激光器本身扫频带宽有限而导致测量精度低的问题,提出了一种扫频带宽扩展的系统方案。
3、而在扫频覆盖范围扩大时,受激光器本身强非线性与热效应等因素影响,使得线性度在较窄频率范围时明显畸变,且功率随激光器调谐同步变化,进而导致测距结果的失真,这是由于激光器的调频曲线的非线性特性,拍频信号的频率会随着时间而改变,其对应拍频信号的谱峰值区域被严重扩展,导致在提取拍频频率时引入一个较大的误差,因此使测量精度降低,且当激光器工作在高宽带、高速率扫频的情况下时,其非线性更为显著,从而无法准确提取目标对应频率,影响激光雷达对目标的探测识别,使光源在实际应用中受到限制。
4、另一方面,激光器采用线性调频形式进行测距,其输出的测距信号必然存在光功率起伏,而光功率起伏影响测距的精度和距离分辨力。因此,本发明研究的基于soa的光功率稳定控制系统,旨在稳定调制后的输出光信号的光功率,而不改变调制信号的所携带的调制信息,从而提高fmcw系统测量的精度和距离分辨力。
5、在激光器光源选择上,目前典型的扫频光源多采用外腔光栅机械调制,虽然调频范围大,但其复杂的机械结构不利于集成化。
技术实现思路
1、针对上述研究的问题,本发明的目的在于提供一种fmcw激光测距光源扫频带宽扩展系统和方法,
2、解决现有技术中的单个激光器工作扫频带宽有限,使得测距精度有限的问题;在高宽带、高速率扫频的情况下时,
3、解决由显著非线性导致的无法准确提取目标位置、对应频率,且影响对目标的探测识别的问题;
4、解决由于采用调频形式进行测距导致的输出测距信号存在光功率起伏,影响测距的精度和距离分辨力以及采用采用外腔光栅机械调制的扫频速度、相干性以及可靠性受限于复杂的机械结构的问题;
5、解决由于双激光器时分复用控制进行频谱拼接导致的相位误差问题。
6、为了达到上述目的,本发明采用如下技术方案:
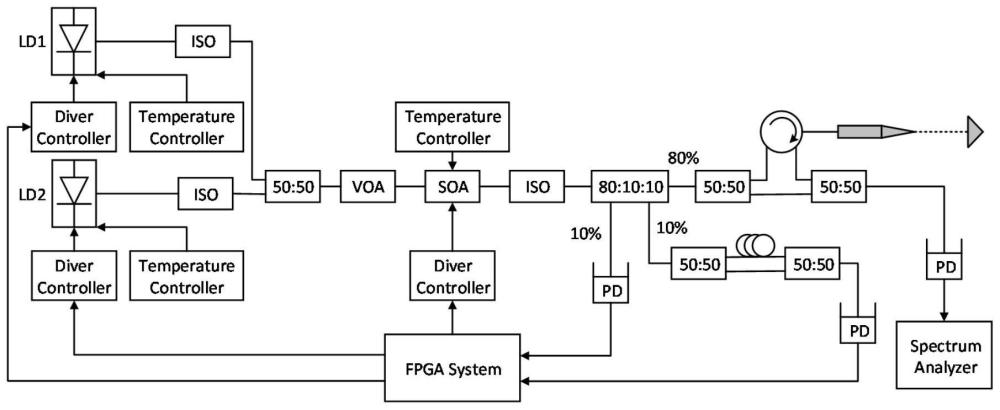
7、本发明提供了一种fmcw激光测距光源扫频带宽扩展系统,包括由温度控制器控制不同温度的两个半导体激光器ld1和ld2,分别与ld1和ld2的输出端相连接的第一隔离器is01,起到合束作用连接两路光的50;50的第一耦合器oc1;
8、合束后依次经过光衰减器voa和由温度控制器控制温度的光放大器soa,光放大器soa的输出端连接第二隔离器is02后经过80∶10∶10的第二耦合器oc2,第二耦合器oc2的第一端口输出作为测量路信号的80%的光,且与由一个环形器、50∶50的第三耦合器cc3和50∶50的第四耦合器oc4构成的测距干涉仪相连接;
9、其中,测距干涉仪通过50;50的第三耦合器oc3将光信号从一路信号分为二路信号,一路信号经过环形器后通过准直器输出并接收回波信号,与另一路信号通过50∶50的第二耦合器合oc2为一路信号;
10、还包括与测距干涉仪的输出端依次相连接的第一光电探测器pd1和频谱分析仪;
11、第二耦合器oc2的第二端口和第三端口分别输出参考路信号10%的光;
12、第二耦合器oc2的第二端口依次连接第二光电探测器pd2和fpga系统;
13、第二耦合器oc2的第三端口依次连接由50;50的第五耦合器oc5、延时光纤和50∶50的第六耦合器oc6组成的马赫-增德尔干涉仪、第三光电探测器pd3和fpga系统;
14、其中,fpga系统的三个输出端分别与soa驱动控制器、ld1驱动控制器和ld2驱动控制器相连接,soa驱动控制器的输出端与光放大器soa连接、ld1驱动控制器与半导体激光器ld1连接,ld2驱动控制器与半导体激光器ld2相连接;
15、其中,马赫-增德尔干涉仪通过50∶50的第五耦合器oc5将光信号从一路信号分为二路信号,一路信号经过固定长度差的延时光纤后,与另一路信号通过50∶50的第第六耦合器oc6合为一路信号。
16、本发明还提供了一种fmcw激光测距光源扫频带宽扩展方法,包括:
17、步骤1:首先初始化两个半导体激光器ld1和ld2、光放大器soa和fpga系统;其中半导体激光器ld1和ld2由fpga系统进行时分复用控制并由温度控制器控制不同工作温度,使扫频带宽拼接;
18、步骤2:初始化后,对经过系统中马赫-增德尔干涉仪产生的拍频信号使用第三光电探测器pd3进行采集并传输到fpga系统的fpga主控单元进行迭代算法处理,使用处理后输出迭代后的锯齿波或三角波周期信号对半导体激光器ld1和ld2的扫频光源中的非线性进行第一次校正;
19、步骤3:对经过光放大器soa输出的调制光信号使用第二光电探测器pd2进行采集并传输到fpga系统的fpga主控单元进行处理,处理后输出反馈式的控制信号到soa驱动控制器进行功率均衡;
20、步骤4:对经过系统中的马赫-增德尔干涉仪产生的拍频信号使用第三光电探测器pd3进行采集并传输到fpga系统的fpga主控单元进行锁相处理,使用处理后输出锁相环校正后的锯齿波或三角波周期信号对半导体激光器ld1和ld2的扫频光源中的非线性进行第二次校正并修正由于信号拼接产生的相位误差。
21、上述技术方案中,所述步骤1具体为:
22、步骤1.1:设置半导体激光器ld1的初始温度为20.5℃,初始电流为350ma,初始锯齿波或三角波周期信号,将初始的锯齿波或三角波周期信号存储在fpga系统的rom1里,初始的锯齿波或三角波周期信号通过fpga系统的da1端口输出,da1端口连接到半导体激光器ld1的激光二极管驱动控制器的调制端口;
23、步骤1.2:设置半导体激光器ld2的初始温度为27℃,初始电流为350ma,初始锯齿波或三角波周期信号,将初始的锯齿波或三角波周期信号存储在fpga系统的rom2里,初始的锯齿波或三角波周期信号通过fpga系统的da2端口输出,da2端口连接到半导体激光器ld2的激光二极管驱动控制器的调制端口;
24、步骤1.3:设置光放大器soa的初始温度为25℃,初始电流为350ma,初始直流信号并将直流信号存储在fpga系统的rom3里,作为初始的控制信号,初始的控制信号通过fpga系统的da3端口输出,da3端口连接到soa驱动控制器的调制端口,其中,直流信号在经过系统处理后得到反馈式的控制信号。
25、上述技术方案中,所述步骤2具体为:
26、步骤2.1:由50∶50的第五耦合器oc5、延时光纤和50∶50的第六耦合器oc6组成的马赫-增德尔干涉仪产生的拍频信号,经过第三光电探测器pd3采集,将第三光电探测器pd3采集到的电信号连接到fpga系统的ad模块输入口ad1中,输入口ad1再将采集的电信号传递到fpga系统的fpga主控单元;
27、步骤2.2:fpga主控单元对电信号通过非线性迭代矫正算法进行处理,并在时分复用处理后输出结果分别传递到da1端口和da2端口,da1端口和da2端口再将结果分别输出到半导体激光器ld1和ld2的激光二极管驱动控制器的调制端口,对半导体激光器ld1和ld2的扫频光源中的非线性进行第一次校正。
28、上述技术方案中,所述步骤2.2中fpga主控单元对电信号通过非线性迭代矫正算法进行处理具体为:
29、在扫描周期内两个半导体激光器ld1和ld2的激光的瞬时频率表示为:
30、ω(t)=ω0+kld[i2(t)]·i2(t), (1-1)
31、其中,ω0是半导体激光器ld1和ld2的初始光频率,i2(t)是t时刻的半导体激光器ld1和ld2的激光二极管驱动控制器的调制端口的调制电流,kld[i2(t)]是指半导体激光器ld1和ld2非线性调频响应中的调制电流i2(t)的增益或调制电流i2(t)的调频系数;
32、根据公式(1-1),得到半导体激光器ld1和ld2的激光的瞬时频率与第三光电探测器pd3采集的拍频信号频率之间的关系为:
33、
34、其中,ωpd是指第三光电探测器pd3采集的拍频信号频率,ω(t)是半导体激光器ld1和ld2输出的激光的瞬时频率,τ表示马赫-增德尔干涉仪mzi的延迟,从上述两个公式(1-1)和(1-2),得到如下公式:
35、
36、其中,ωpd(t)表示t时刻第三光电探测器pd3的拍频信号频率,是半导体激光器ld1和ld2的扫频速率,fdist(i2)表示非线性函数,i2表示半导体激光器ld1和ld2的激光二极管驱动控制器的调制端口的调制电流;
37、从公式(1-3)得到非线性函数fdist(i2),如下所示:
38、
39、在理想情况下,有
40、ωpd(t)≡ωdesired, (1-5)
41、其中,ωdesired表示理想频率,即在信号稳定的情况下,频率大小不变,为定值,
42、那么有:
43、
44、通过从公式(1-6)获得的电流来降低半导体激光器ld1和ld2的扫描非线性,fdist(i2)是未知的,通过初始的锯齿波或三角波周期信号调制下的第三光电探测器pd3采集的拍频信号频率带入公式(1-7)求解fdist(i2),再代入公式(1-8)得到新的电流来降低激光扫频非线性,重复这一过程,即迭代n次,直到半导体激光器ld1和ld2的激光输出的扫频光接近理想的线性度,即通过公式(1-4)和公式(1-6)得到电流的迭代方程组,如公式(1-7)和(1-8)所示:
45、
46、
47、将公式(1-7)代入(1-8),最终迭代方程如下:
48、
49、上述技术方案中,得到ωpd(t)n-1的具体步骤为:
50、步骤2.2.1:在第1次迭代前,半导体激光器ld1和ld2产生的干涉信号经过第三光电探测器pd3采集得到ad1数据,ad1数据经过带通滤波器,得到信号1,其中,ad1数据即为输入fpga主控单元的电信号;
51、步骤2.2.2:将信号1分别通过鉴相滤波器和延时器,得到信号2和信号3;
52、步骤2.2.3:将信号2和信号3输入反正切模块,得到相位信号4;
53、步骤2.2.4:将相位信号4输入差分器,得到频率信号5;
54、步骤2.2.5:将频率信号5输入低通滤波器,得到降噪后的频率信号6;
55、步骤2.2.6:根据公式(1-9),将频率信号6输入迭代器,得到一次迭代后的da1和da2调制信号,即处理后的迭代信号,迭代信号通过fmcw系统产生拍频信号,拍频信号经过第三光电探测器pd3采集后作为下次迭代的输入信号,直到迭代了n-1次,得到ωpd(t)n-1。
56、上述技术方案中,所述步骤2.2中时分复用处理具体为:
57、在扫描周期内形成两个完整的锯齿波或三角波周期信号,前半周期的锯齿波或三角波信号经过da1端口进入半导体激光器ld1的激光二极管驱动控制器的调制端口,控制半导体激光器ld1进行线性调频,而半导体激光器ld2停止输出光;后周期的锯齿波或三角波信号经过da2端口进入半导体激光器ld2的激光二极管驱动控制器的调制端口,控制半导体激光器ld2进行线性调频,而半导体激光器ld1停止输出光;前后两部分光束分别经过第一隔离器is01和第二隔离器is02后,由50∶50第六耦合器oc6后合束,生成一个完整的扫频周期。
58、上述技术方案中,所述步骤3具体为:
59、步骤3.1:由第二光电探测器pd2采集经过系统中的光放大器soa输出的光功率,第二光电探测器pd2进行功率转换后的电信号连接到fpga系统的ad模块输入口ad2中,ad模块输入口ad2再将采集的电信号传递到fpga系统的fpga主控单元;
60、步骤3.2:传递到fpga主控单元的电信号通过均衡算法处理,处理后输出的结果传递到da3端口,da3端口再将结果输出到soa驱动控制器的调制端口,对光路中的光功率进行控制。
61、上述技术方案中,所述步骤3.2中对fpga主控单元的电信号通过均衡算法处理具体为:通过校正算法进行开环控制;
62、校正算法具体如下:
63、通过对光放大器soa放大特性测试,测量出光放大器soa特性与调制电流大小的函数关系,记为k(i1),k(i1)表示光放大器soa输出到soa驱动控制器的调制端口的调制电流为i1时的放大倍数;
64、进入光放大器soa前的光功率pin和实际输出的光功率pout大小分别为:
65、
66、其中,p(t)表示t时刻半导体激光器输出的光功率,σ是进入光放大器soa前的光路的衰减系数,pout(t),pin(t),k(i1(t))分别是t时刻光放大器soa输出的光功率pout,输入光放大器soa的光功率pin和放大倍数,i1(t)表示t时刻输出到soa驱动控制器的调制端口的校正电流,即调制电流;
67、在理想情况下,有
68、pout(t)≡ps, (2-2)
69、其中,ps表示理想功率,即在功率稳定的情况下,功率大小不变,为定值;
70、得到t时刻输出到soa驱动控制器的调制端口的预校正电流i1(t)公式如下:
71、
72、得到校正电流i1(t),将整周期的校正电流i1(t)一次写入fpga系统的双端口ram中,fpga系统读出校正电流i1(t),通过da模块的da3将结果输出到soa驱动控制器的调制端口,稳定光功率。
73、上述技术方案中,所述步骤4具体为:
74、步骤4.1:由50∶50的第五耦合器oc5、延时光纤和50∶50的第六耦合器oc6组成的马赫-增德尔干涉仪产生的拍频信号,经过第三光电探测器pd3采集,将通过第三光电探测器pd3进行功率转换后的电信号连接到fpga系统的ad模块输入口ad1中,输入口ad1再将采集的电信号传递到fpga系统的fpga主控单元;
75、步骤4.2:fpga主控单元对电信号通过非线性锁相环矫正算法进行处理,并在时分复用处理后输出结果分别传递到da1端口和da2端口,da1端口和da2端口再将结果分别输出到半导体激光器ld1和ld2的激光二极管驱动控制器的调制端口,对半导体激光器ld1和ld2的扫频光源中的非线性进行第二次校正,并对频谱拼接时产生的相位误差进行修正;所述步骤4.2中fpga主控单元对电信号通过锁相环矫正非线性具体为:
76、在第三光电探测器pd3上捕获的正弦拍信号通过过零比较转换成方波信号:
77、
78、描述为:
79、
80、其中为fpga的系统时钟;
81、转换后的方波信号ref[n]与参考方波信号scz(n)进行鉴相,产生误差信号error,并量化为具体值,误差信号error可以表示为:
82、
83、积分后产生激光调制电流的修正信号phase,时分复用后,调制电流通过da1端口和da2端口注入到激光驱动模块中;
84、锁相环得到校正信号phase的具体步骤为:
85、步骤4.2.1:在第1次迭代前,半导体激光器ld1和ld2产生的干涉信号经过第三光电探测器pd3采集得到ad2数据,ad2数据经过过零比较器,得到方波信号1,其中,ad2数据即为输入fpga主控单元的电信号;
86、步骤4.2.2:由fpga主控单元产生时钟信号2,将信号2分别通过过零比较器得到参考路方波信号3;
87、步骤4.2.3:将信号1和信号3输入鉴相器,得到误差信号4;
88、步骤4.2.4:将相位信号4输入时间-数字转换器量化为具体值信号5;
89、步骤4.2.5:将频率信号5输入积分器产生激光调制电流校正信号phase;
90、步骤4.2.6:将频率信号phase输入迭代器,得到经过一次校正后的da1和da2调制信号,即处理后的调制信号;校正后的调制信号通过反馈系统产生拍频信号,拍频信号经过第三光电探测器pd3采集后作为下次校正的输入信号,连续迭代,得到校正后的调制电流。
91、本发明同现有技术相比,其有益效果表现在:
92、一、本发明中的系统方案即包含了功率均衡系统,又包含非线性校正以及相位误差修正系统,扫频光源采用电流调制方式和温度控制,结构简单紧凑、性价比高、调频速度快、能准确提取目标位置、对应频率等明显优势,是实现线性扫频光源的理想方式;
93、二、本发明针对扫频带宽扩展搭建了基于双激光器的扫频带宽拼接系统,通过fpga控制系统对两个激光器进行时分复用控制,并通过数字锁相环修正信号拼接产生的相位误差,经频谱仪验证带宽扩展效果好、相位误差低。
94、三、本发明针对调频中的光功率起伏搭建了基于光放大器soa的光功率稳定控制系统,旨在稳定调制后的输出光信号的光功率,而不改变调制信号的所携带的调制信息,功率起伏度从2.52降低到了0.12,从而提高fmcw系统测量的精度和距离分辨力;
95、四、本发明针对调频非线性搭建了双光路调频连续波激光光源校正系统,以双光路激光的干涉原理和非线性的产生机制进行了数学推导和建立了适用的数学模型,并在matlab中对功率均衡、非线性校正和相位误差校正进行了模拟验证,证实了多次迭代、功率开环控制和锁相环校正对光源有大的改善;
96、五、本发明中的迭代算法和锁相环的校正效果对电流调谐半导体激光器的调频非线性有了明显改善并消除频谱拼接时产生的相位误差,在瞬时频率的获取上,相当于在fpga系统中增加了多个数字滤波器去噪,减少了光电探测器pd的性能要求和成本,有效的抑制了噪声,使得采样结果更清晰准确,并进行了重复性测试,证明该迭代算法和锁相环校正具有良好的重复性和稳定性,既简化了系统,又提高了系统精度。
- 还没有人留言评论。精彩留言会获得点赞!