一种光学膜表面瑕疵缺陷智能检测方法与流程
本发明涉及使用光学手段测试瑕疵的,具体涉及一种光学膜表面瑕疵缺陷智能检测方法。
背景技术:
1、光学膜由多层不同材料的薄膜组成,主要用于调节光的传输和反射特征,为了保证调节的准确性,需要对光学膜进行瑕疵检测;传统方法通过对采集的光学膜图像进行阈值分割,从而将光学膜表面的瑕疵分割而出,但光学膜本身包含多层薄膜,若内部薄膜出现微小压痕瑕疵时,会因外面薄膜的遮挡,导致光学膜表面的压痕瑕疵并不明显,从而无法将微小的压痕瑕疵有效分割而出。
技术实现思路
1、本发明提供一种光学膜表面瑕疵缺陷智能检测方法,以解决现有的问题:光学膜本身包含多层薄膜,若内部薄膜出现微小压痕瑕疵,会因外面薄膜的遮挡,导致光学膜表面微小的压痕瑕疵并不明显,从而无法利用传统的阈值分割方法将微小的压痕瑕疵有效分割而出。
2、本发明的一种光学膜表面瑕疵缺陷智能检测方法采用如下技术方案:
3、包括以下步骤:
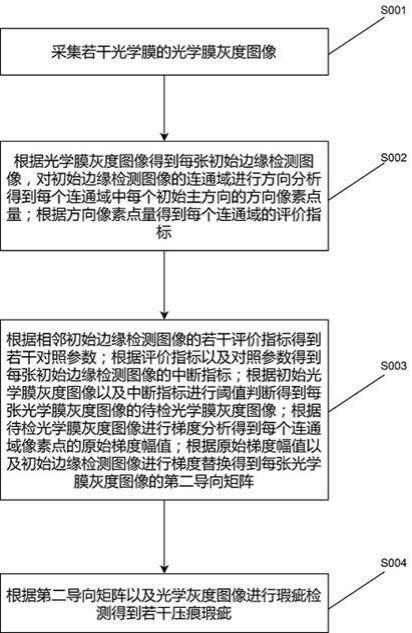
4、采集若干光学膜的光学膜灰度图像;
5、将任意一个光学膜灰度图像的频谱图像划分为若干参考区域;对于任意一个参考区域,将去除参考区域后的频谱图像记为过滤中心频谱图像,将过滤中心频谱图像进行逆傅里叶变换得到过滤后的光学膜灰度图像,记为初始光学膜灰度图像;对初始光学膜灰度图像进行canny边缘检测得到初始边缘检测图像,所述初始边缘检测图像上的所有边缘像素点构成多个连通域,将连通域中每个像素点记为连通域像素点;对初始边缘检测图像的连通域进行方向分析得到每个连通域中每个初始主方向的方向像素点量;根据方向像素点量得到每个连通域的评价指标,所述评价指标用于描述连通域属于压痕瑕疵的可能性;
6、根据相邻初始边缘检测图像的若干评价指标得到若干对照参数;根据评价指标以及对照参数得到每张初始边缘检测图像的中断指标,所述中断指标用于描述瑕疵区域显示的清晰度;根据初始光学膜灰度图像以及中断指标进行阈值判断得到每张光学膜灰度图像的待检光学膜灰度图像;根据待检光学膜灰度图像进行梯度分析得到每个连通域像素点的原始梯度幅值;根据原始梯度幅值以及初始边缘检测图像进行梯度替换得到每张光学膜灰度图像的第二导向矩阵;
7、根据第二导向矩阵以及光学灰度图像进行瑕疵检测得到若干压痕瑕疵。
8、优选的,所述将任意一个光学膜灰度图像的频谱图像划分为若干参考区域,包括的具体方法为:
9、对于任意一张光学膜灰度图像,对光学膜灰度图像的频谱图像进行频谱中心化得到中心化后的频谱图像,将中心化后的频谱图像记为中心频谱图像;
10、对于任意一张中心频谱图像,以r为半径做圆形区域,其中以r=1为初始值,以1为步长,依次令r递增,得到若干个圆形区域;将每个圆形区域在中心频谱图像中所占的区域记为参考区域。
11、优选的,所述对初始边缘检测图像的连通域进行方向分析得到每个连通域中每个初始主方向的方向像素点量,包括的具体方法为:
12、对于任意一张初始边缘检测图像中任意一个连通域,利用pca主成分分析法获取连通域的所有特征向量,将每个特征向量在连通域中对应的方向记为初始主方向;
13、对于任意一个初始主方向,在连通域中,将初始主方向上所包含连通域像素点的最大数量记为初始主方向的方向像素点量。
14、优选的,所述根据方向像素点量得到每个连通域的评价指标,包括的具体方法为:
15、将每个连通域像素点在初始光学膜灰度图像中的灰度值记为连通域像素点的原始灰度值;
16、;
17、对于任意一张初始边缘检测图像中任意一个连通域,式中,表示连通域的评价指标;表示连通域中所有初始主方向的方向像素点量的最大值;表示连通域中所有初始主方向的方向像素点量的最小值;表示连通域中所有连通域像素点的数量;表示连通域中第个连通域像素点的原始灰度值;表示连通域中所有连通域像素点的原始灰度值的均值;表示连通域中所有连通域像素点的原始灰度值的标准差;表示预设的超参数。
18、优选的,所述根据相邻初始边缘检测图像的若干评价指标得到若干对照参数,包括的具体方法为:
19、对于任意一张光学膜灰度图像的任意两张相邻的初始边缘检测图像,在两张初始边缘检测图像中,将连通域数量最大的初始边缘检测图像记为第一参照边缘图像,将另一张初始边缘检测图像记为第二参照边缘图像;第一参照边缘图像中所有连通域的评价指标进行降序排列,将排列后的序列记为基准序列;将第二参照边缘图像中所有连通域的评价指标进行降序排列,将排列后的序列记为参照序列;
20、将预设的评价指标数量记为t0;将基准序列中任意一个评价指标记为第一评价指标,在参照序列中获取与第一评价指标的差值的绝对值最小的t0个评价指标,将这t0个评价指标记为第一评价指标的对照评价指标;
21、对于第一评价指标的任意一个对照评价指标,将对照评价指标与第一评价指标的差值的绝对值记为第一评价指标的一个对照参数。
22、优选的,所述根据评价指标以及对照参数得到每张初始边缘检测图像的中断指标,包括的具体方法为:
23、对于任意一张光学膜灰度图像的任意两张相邻的初始边缘检测图像,在两张初始边缘检测图像中,将第二张初始边缘检测图像记为目标边缘检测图像;
24、;
25、式中,表示目标边缘检测图像的中断指标;表示基准序列中所有评价指标的数量;表示基准序列中第个评价指标的所有对照参数的最大值;表示基准序列中第个评价指标的所有对照参数的最小值;表示基准序列中第个评价指标的所有对照参数的均值;表示基准序列中第个评价指标;表示辛格函数;表示取绝对值。
26、优选的,所述根据初始光学膜灰度图像以及中断指标进行阈值判断得到每张光学膜灰度图像的待检光学膜灰度图像,包括的具体方法为:
27、对于任意一张光学膜灰度图像的任意两张相邻的初始边缘检测图像,在两张初始边缘检测图像中,将第二张初始边缘检测图像记为目标边缘检测图像,将预设的中断指标阈值记为t1;
28、若目标边缘检测图像的中断指标大于t1,将目标边缘检测图像对应的初始光学膜灰度图像记为光学膜灰度图像的一个初始待检灰度图像;获取光学膜灰度图像的所有初始待检灰度图像,将光学膜灰度图像的第一个初始待检灰度图像记为光学膜灰度图像的待检光学膜灰度图像。
29、优选的,所述根据待检光学膜灰度图像进行梯度分析得到每个连通域像素点的原始梯度幅值,包括的具体方法为:
30、对于任意一张光学膜灰度图像的待检光学膜灰度图像,利用sobel算子获取待检光学膜灰度图像中所有像素点的梯度幅值;对于待检光学膜灰度图像的初始边缘检测图像中任意一个连通域内任意一个连通域像素点,将连通域像素点在待检光学膜灰度图像中的梯度幅值记为连通域像素点的初始原始梯度幅值;
31、;
32、式中,表示连通域像素点的原始梯度幅值;表示连通域像素点的初始原始梯度幅值;表示连通域的评价指标;表示所有连通域的评价指标的最大值。
33、优选的,所述根据原始梯度幅值以及初始边缘检测图像进行梯度替换得到每张光学膜灰度图像的第二导向矩阵,包括的具体方法为:
34、对于任意一张光学膜灰度图像的待检光学膜灰度图像,构建一个矩阵大小与待检光学膜灰度图像大小相同的空矩阵;对于待检光学膜灰度图像的初始边缘检测图像中任意一个连通域像素点,将连通域像素点的原始梯度幅值赋予空矩阵中与连通域像素点位置序号相同的元素;将每个连通域像素点的梯度幅值赋予空矩阵中与每个连通域像素点位置序号相同的元素后,将空矩阵记为待检光学膜灰度图像的第一导向矩阵;
35、将待检光学膜灰度图像的初始边缘检测图像中除连通域像素点以外的任意一个像素点记为常规像素点,将常规像素点在待检光学膜灰度图像中的梯度幅值记为常规像素点的原始梯度幅值,将常规像素点的原始梯度幅值赋予第一导向矩阵中与常规像素点位置序号相同的元素;将每个常规像素点的梯度幅值赋予第一导向矩阵中与每个常规像素点位置序号相同的元素后,将第一导向矩阵记为光学膜灰度图像的第二导向矩阵。
36、优选的,所述根据第二导向矩阵以及光学灰度图像进行瑕疵检测得到若干压痕瑕疵,包括的具体方法为:
37、对于任意一张光学膜灰度图像,在光学膜灰度图像的第二导向矩阵中,将每个元素的数值重新赋予光学膜灰度图像中对应像素点的梯度幅值后,将光学膜灰度图像记为光学膜灰度图像的导向光学膜灰度图像;
38、将光学膜灰度图像作为导向滤波器的目标图像,将光学膜灰度图像的导向光学膜灰度图像作为导向滤波器的引导图像,根据目标图像以及引导图像利用导向滤波器得到滤波结果图像,并记为光学膜灰度图像的增强图像;
39、将光学膜灰度图像的增强图像输入训练好的神经网络中获取光学膜灰度图像中的若干压痕瑕疵。
40、本发明的技术方案的有益效果是:根据光学膜灰度图像进行半径划分得到参考区域,根据参考区域得到初始边缘检测图像,根据初始边缘检测图像得到连通域的评价指标,根据评价指标得到中断指标,根据中断指标进行梯度分析得到原始梯度幅值,根据原始梯度幅值得到第二导向矩阵,根据第二导向矩阵进行瑕疵检测;相较于现有技术内部薄膜出现微小压痕瑕疵,会因外面薄膜的遮挡,导致光学膜表面微小的压痕瑕疵并不明显,无法利用传统的阈值分割方法将微小的压痕瑕疵有效分割而出;本发明的评价指标反映了连通域边缘的平整性以及连通域属于压痕瑕疵的概率,中断指标反映了瑕疵区域显示的清晰度,原始梯度幅值反映了连通域像素点的初始原始梯度幅值需要调整的幅度;使微小的压痕瑕疵显示更加清晰,提高了瑕疵检测结果的准确性。
- 还没有人留言评论。精彩留言会获得点赞!