一种用于激光雷达的激光器的高边驱动方法及装置与流程
本技术涉及自动驾驶,尤其涉及一种用于激光雷达的激光器的高边驱动方法及装置。
背景技术:
1、车载激光雷达在自动驾驶技术领域中占据重要地位。车载激光雷达包括传感器、驱动器、激光器和数据处理系统等部件。通过驱动器驱动激光器发出脉冲光,利用传感器检测来自目标的反射光,再利用飞行时间法等算法,由数据处理系统计算出与目标之间的距离数据。为了能够探测更远的距离,也考虑到从发射光到反射光存在严重的衰减,需要由驱动器产生更大的脉冲电流,例如40安培的脉冲电流,进而驱动激光器发出所需要的脉冲光。现有技术中,采用氮化镓器件来构成驱动器以产生用于驱动激光器的脉冲电流。但是,采用氮化镓器件的驱动器具有较大的模组面积,且只能采用n型器件,与另一个预驱动芯片一起构成驱动方案,因此需要分立器件级联,导致信号质量差,信号完整性差。另外,采用氮化镓器件的驱动器只能采用低边驱动方式,也就是需要闭合地线来实现驱动使能。目前一种常见的激光器是垂直腔面发射激光器(vertical-cavity surface-emitting laser,vcsel)。vcsel的结构中阴极占据背面整个区域而阳极从正面引出。因此,采用氮化镓器件的驱动器用于驱动垂直腔面发射激光器,需要对阳极绑线且需要对阴极做引出处理,这样给布线布局带来障碍,也不利于使用成熟的硅基集成工艺,因此导致更高的制造成本和更低的集成度。
2、为此,本技术提供了一种用于激光雷达的激光器的高边驱动方法及装置,用于应对现有技术中的技术难题。
技术实现思路
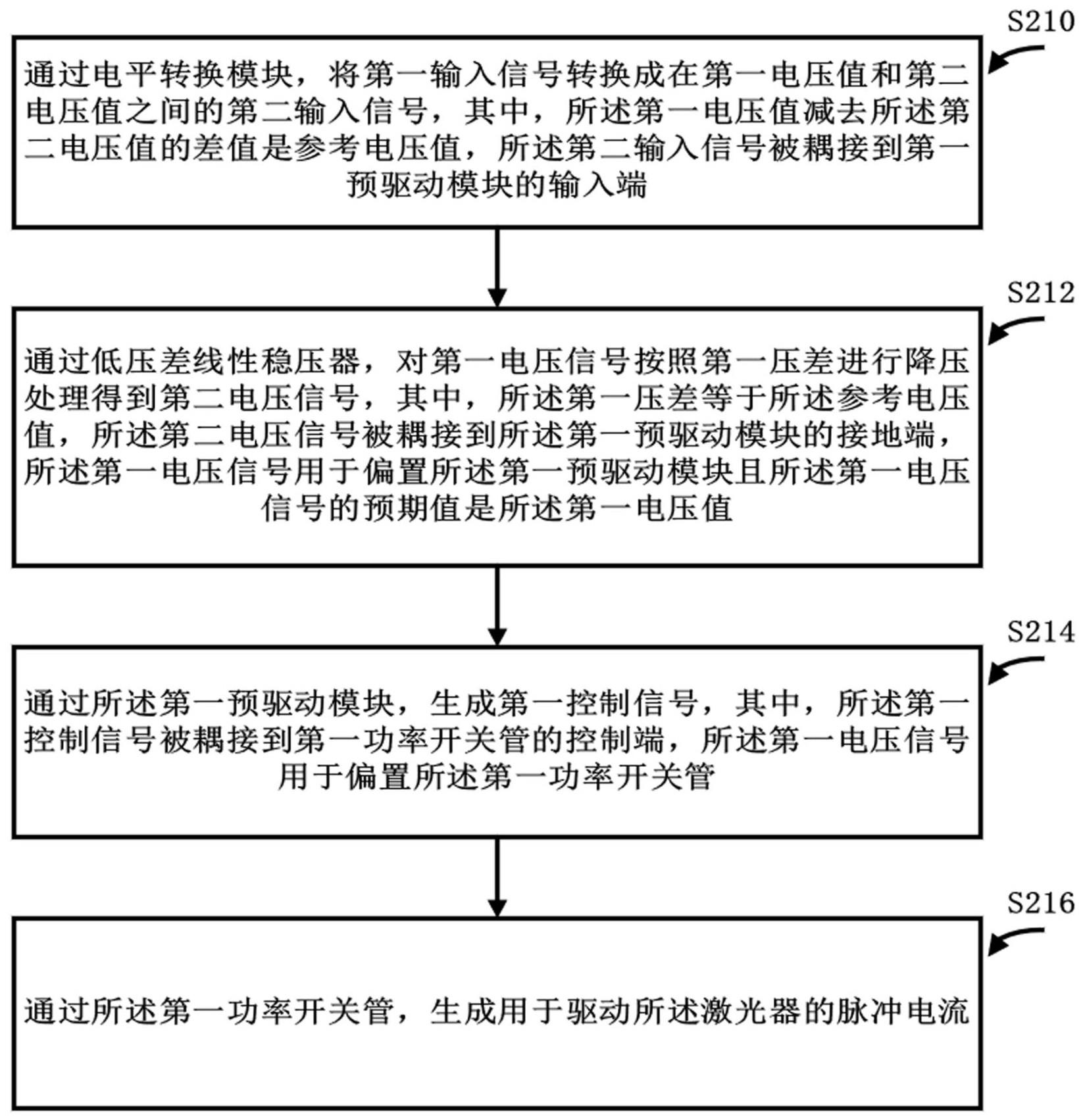
1、第一方面,本技术提供了一种用于激光雷达的激光器的高边驱动方法。所述高边驱动方法包括:通过电平转换模块,将第一输入信号转换成在第一电压值和第二电压值之间的第二输入信号,其中,所述第一电压值减去所述第二电压值的差值是参考电压值,所述第二输入信号被耦接到第一预驱动模块的输入端;通过低压差线性稳压器,对第一电压信号按照第一压差进行降压处理得到第二电压信号,其中,所述第一压差等于所述参考电压值,所述第二电压信号被耦接到所述第一预驱动模块的接地端,所述第一电压信号用于偏置所述第一预驱动模块且所述第一电压信号的预期值是所述第一电压值;通过所述第一预驱动模块,生成第一控制信号,其中,所述第一控制信号被耦接到第一功率开关管的控制端,所述第一电压信号用于偏置所述第一功率开关管;通过所述第一功率开关管,生成用于驱动所述激光器的脉冲电流。
2、通过本技术的第一方面,实现了高边驱动方式下驱动第一功率开关管来生成用于驱动激光器的脉冲电流,不仅提供高速大电流从而有助于实现更远探测距离和更好的信噪比,而且可以采用非氮化镓器件来构成驱动方案从而能更好地适配垂直腔面发射激光器,也能更好地应用单片集成工艺等成熟硅基集成工艺来降低成本和简化布局。另外,通过电平转换模块和低压差线性稳压器以及基于参考电压值的设定,对于第一预驱动模块的控制及偏置还有第一功率开关管的控制及偏置进行了优化,有助于实现高频抖动跟随,在车载激光雷达和自动驾驶等应用场景中有利于实现高质量、高稳定性的用于驱动激光器的高速大电流信号。
3、在本技术的第一方面的一种可能的实现方式中,所述电平转换模块包括可调电阻,所述可调电阻被耦接在所述第一电压信号和所述第一预驱动模块的输入端之间,所述可调电阻的电阻值基于第一电容的电容值和所述第一输入信号的半波脉宽确定,所述第一电容是从所述第一预驱动模块的输入端到地的寄生电容。
4、在本技术的第一方面的一种可能的实现方式中,所述可调电阻的电阻值与所述第一电容的电容值一起组成的电阻电容时间常数不大于所述第一输入信号的半波脉宽的十分之一。
5、在本技术的第一方面的一种可能的实现方式中,所述第一电压信号的抖动通过所述可调电阻被传递到所述第一预驱动模块的输入端。
6、在本技术的第一方面的一种可能的实现方式中,所述电平转换模块还包括可调电流源,所述可调电流源的输出电流经过所述可调电阻从而使得所述可调电阻上的压降为所述参考电压值。
7、在本技术的第一方面的一种可能的实现方式中,所述高边驱动方法还包括:通过主动下拉模块,基于所述第一输入信号下拉所述第一功率开关管的负载端的电压从而改善所述激光器所生成的光脉冲波形的上升沿和下降沿。
8、在本技术的第一方面的一种可能的实现方式中,所述主动下拉模块包括延时模块,或逻辑门,第二预驱动模块以及第二功率开关管,其中,通过所述主动下拉模块,基于所述第一输入信号下拉所述第一功率开关管的负载端的电压,包括:通过所述延时模块,延时所述第一输入信号从而输出延时后第一输入信号;通过所述或逻辑门,对所述第一输入信号和所述延时后第一输入信号进行或逻辑计算从而得到第三输入信号,其中,所述第三输入信号被耦接到所述第二预驱动模块的输入端,所述第二预驱动模块的偏置电压是所述参考电压值,所述第二预驱动模块的接地端直接接地;通过所述第二预驱动模块,生成第二控制信号,其中,所述第二控制信号被耦接到第二功率开关管的控制端,所述第一功率开关管的负载端的电压用于偏置所述第二功率开关管;通过所述第二功率开关管,生成用于下拉所述第一功率开关管的负载端的电压的电流,其中,所述第二功率开关管的类型与所述第一功率开关管的类型相反。
9、在本技术的第一方面的一种可能的实现方式中,所述第二预驱动模块以低边驱动方式驱动所述第二功率开关管,所述第一预驱动模块以高边驱动方式驱动所述第一功率开关管。
10、在本技术的第一方面的一种可能的实现方式中,当所述第一功率开关管是n型晶体管时,所述第二功率开关管是p型晶体管,或者,当所述第一功率开关管是p型晶体管时,所述第二功率开关管是n型晶体管。
11、在本技术的第一方面的一种可能的实现方式中,所述参考电压值是所述第一功率开关管的最大可承受压差。
12、在本技术的第一方面的一种可能的实现方式中,所述激光雷达用于车载应用,所述第一电压信号是汽车电池电压。
13、在本技术的第一方面的一种可能的实现方式中,所述第一功率开关管是p型横向扩散场效应晶体管或者n型横向扩散场效应晶体管。
14、在本技术的第一方面的一种可能的实现方式中,所述第一功率开关管是非氮化镓器件且可通过单片集成工艺制造。
15、第二方面,本技术实施例还提供了一种用于激光雷达的激光器的高边驱动装置。所述高边驱动装置包括:脉冲信号接收器,用于接收输入脉冲信号从而生成第一输入信号;电平转换模块,用于将所述第一输入信号转换成在第一电压值和第二电压值之间的第二输入信号,其中,所述第一电压值减去所述第二电压值的差值是参考电压值,所述第二输入信号被耦接到第一预驱动模块的输入端;低压差线性稳压器,用于对第一电压信号按照第一压差进行降压处理得到第二电压信号,其中,所述第一压差等于所述参考电压值,所述第二电压信号被耦接到所述第一预驱动模块的接地端,所述第一电压信号用于偏置所述第一预驱动模块且所述第一电压信号的预期值是所述第一电压值;所述第一预驱动模块,用于生成第一控制信号,其中,所述第一控制信号被耦接到第一功率开关管的控制端,所述第一电压信号用于偏置所述第一功率开关管;所述第一功率开关管,用于生成用于驱动所述激光器的脉冲电流。
16、通过本技术的第二方面,实现了高边驱动方式下驱动第一功率开关管来生成用于驱动激光器的脉冲电流,不仅提供高速大电流从而有助于实现更远探测距离和更好的信噪比,而且可以采用非氮化镓器件来构成驱动方案从而能更好地适配垂直腔面发射激光器,也能更好地应用单片集成工艺等成熟硅基集成工艺来降低成本和简化布局。另外,通过电平转换模块和低压差线性稳压器以及基于参考电压值的设定,对于第一预驱动模块的控制及偏置还有第一功率开关管的控制及偏置进行了优化,有助于实现高频抖动跟随,在车载激光雷达和自动驾驶等应用场景中有利于实现高质量、高稳定性的用于驱动激光器的高速大电流信号。
17、在本技术的第二方面的一种可能的实现方式中,所述电平转换模块包括可调电阻,所述可调电阻被耦接在所述第一电压信号和所述第一预驱动模块的输入端之间,所述可调电阻的电阻值基于第一电容的电容值和所述第一输入信号的半波脉宽确定,所述第一电容是从所述第一预驱动模块的输入端到地的寄生电容,所述第一电压信号的抖动通过所述可调电阻被传递到所述第一预驱动模块的输入端。
18、在本技术的第二方面的一种可能的实现方式中,所述高边驱动装置还包括主动下拉模块,所述主动下拉模块用于:基于所述第一输入信号下拉所述第一功率开关管的负载端的电压从而改善所述激光器所生成的光脉冲波形的上升沿和下降沿。
19、在本技术的第二方面的一种可能的实现方式中,所述主动下拉模块包括延时模块,或逻辑门,第二预驱动模块以及第二功率开关管,其中,所述延时模块用于延时所述第一输入信号从而输出延时后第一输入信号,所述或逻辑门用于对所述第一输入信号和所述延时后第一输入信号进行或逻辑计算从而得到第三输入信号,所述第三输入信号被耦接到所述第二预驱动模块的输入端,所述第二预驱动模块的偏置电压是所述参考电压值,所述第二预驱动模块的接地端直接接地,所述第二预驱动模块用于生成第二控制信号,所述第二控制信号被耦接到第二功率开关管的控制端,所述第一功率开关管的负载端的电压用于偏置所述第二功率开关管,所述第二功率开关管用于生成用于下拉所述第一功率开关管的负载端的电压的电流,所述第二功率开关管的类型与所述第一功率开关管的类型相反。
- 还没有人留言评论。精彩留言会获得点赞!