一种基于双基地MIMO雷达的定位方法
本发明属于双基地mimo雷达定位,主要涉及一种基于双基地mimo雷达的定位方法。
背景技术:
1、mimo(multiple input multiple output)雷达是一种新型雷达,mimo的技术引自于通信技术,一直是近十年来国内外研究的热点。mimo雷达使用多个发射和接收天线来同时发送相互正交的波形和接收信号,利用阵列元素之间固有的信号正交性,使得虚拟阵列具有比物理可用天线更大的容量。这一特点为mimo雷达增强了孔径扩展和空间自由度(dof),提供了高分辨率、多目标检测和抗干扰能力等优势。mimo雷达可分为集中式雷达和分布式雷达,集中式雷达包括双基地雷达和单基地雷达。双基地mimo雷达是集中式mimo雷达的一种,它利用横向或前向散射进行目标检测,与单基地雷达相比,可以产生更一致的雷达散射截面积(rcs)以便更好获取目标信息。
2、在双基地mimo雷达中,定位问题主要是对目标的到达角(doa)、出发角(dod)、距离和速度进行估计,角度估计对于目标参数估计十分重要。然而传统的角度估计方法往往无法超过“瑞利限”。为解决这一问题,各种超分辨doa估计技术应运而生。例如,子空间类方法多信号分类(music)算法被提出用于doa和dod估计。为了进一步提高精度,引入压缩感知(cs)类算法如正交匹配追踪(omp)算法进行角度估计。受制于cs中离网误差和字典存储等挑战,原子范数最小化(anm)被用于克服此类问题。anm通常将问题建立为半正定规划(sdp)问题,并通过凸优化进行求解。然而,使用sdp会带来较高的计算复杂度,这使得它无法处理大规模mimo阵列的参数估计问题。
3、在双基地mimo雷达中,通常不是解决某个单一的估计问题,而是角度、速度或距离的多参数联合估计。由于在多参数联合估计中各维度间互相耦合、建模场景较为复杂,因此需要先将接收信号中各参数解耦后再进行估计。在二维联合估计中,常用解耦原子范数进行估计;然而当面临三维或者更高维度参数联合估计时,需要考虑引入张量分解(pd)对接收信号进行处理。
4、因此,研究一种适用于双基地mimo雷达的定位估计算法,使其保持高精度的同时有效降低计算复杂度,并且能够适用于大规模阵列,具有重大实用价值和研究意义。
技术实现思路
1、为解决上述背景技术中存在的问题,本发明提出一种基于双基地mimo雷达的高效定位方法,作为一种区别于传统多参数估计的方法,提高精度的同时,降低了复杂度,并能够在复杂大规模mimo阵列中得到运用。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种基于双基地mimo雷达的定位方法,包括如下步骤:
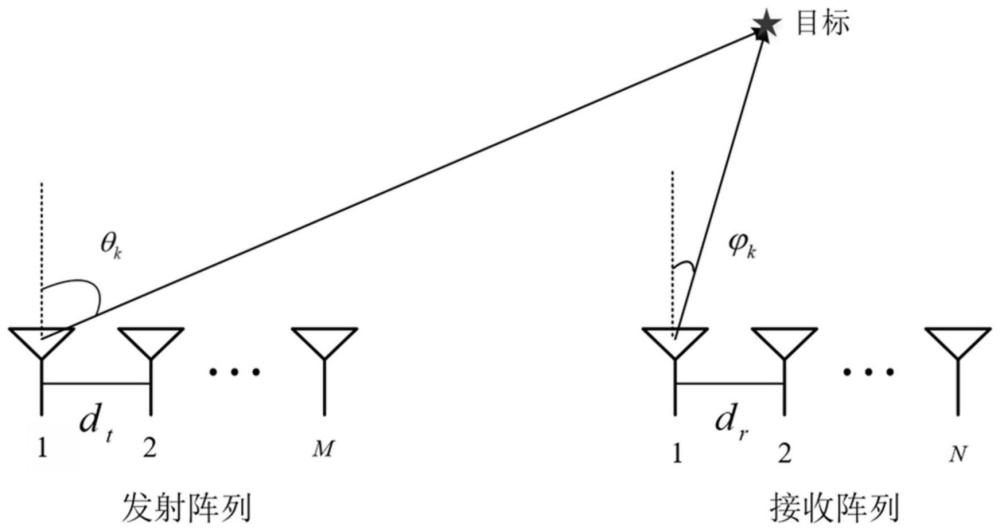
4、步骤一、双基地mimo雷达发射阵列发射多个正交脉冲;雷达接收阵列获取含有目标发射角度θk、到达角度以及速度νk特征的原始信号数据;
5、步骤二、在获得含有目标发射角度θk、到达角度以及速度νk特征的原始信号数据后,利用发射波形的正交特性,对原始信号数据做正交处理,并通过匹配滤波后,得到一个快拍情况下的二维接收信号模型;
6、步骤三、收集步骤二中发射脉冲周期内所有快拍下得到的二维接收信号模型,对二维接收信号模型堆叠处理,将二维接收信号模型变成包含目标所有信息的三维接收张量模型;
7、步骤四、对步骤三中得到的包含目标多参数的三维接收张量模型进行张量分解,得到目标中包含每一参数维度的信号矩阵;
8、步骤五、对步骤四得到的信号矩阵,采用基于原子范数最小化的快速迭代算法,估计出多目标的参数信息,完成对目标的定位。
9、步骤五包括:
10、估计目标的发射角度信息,包括:
11、对步骤四中得到的仅含发射角度信息的信号矩阵构建原子范数最小化问题,并转化为半正定规划问题;
12、提出基于原子范数最小化的快速迭代算法,将上述半正定规划问题重新转述为无约束问题,通过迭代和原子软阈值收缩,求得目标的发射角度信息;
13、估计目标的到达角度信息,包括:
14、对步骤四中得到的仅含到达角度信息的信号矩阵构建原子范数最小化问题,并转化为半正定规划问题;
15、提出基于原子范数最小化的快速迭代算法,将上述半正定规划问题重新转述为无约束问题,通过迭代和原子软阈值收缩,求得目标的到达角度信息;
16、估计目标的速度信息,包括:
17、对步骤四中得到的仅含速度信息的信号矩阵构建原子范数最小化问题,并转化为半正定规划问题;
18、提出基于原子范数最小化的快速迭代算法,将上述半正定规划问题重新转述为无约束问题,通过迭代和原子软阈值收缩,求得目标的速度信息。
19、步骤二得到的二维接收信号模型yl由接收信号xl通过变形得来:
20、xl=bσlats+wl
21、yl=(1/l)xlsh=bσlat+nl
22、其中,其中,a和b分别为发射和接收的导向矩阵,上标t表示转置,上标h表示共轭;σl表示第l快拍时目标的雷达散射截面积和多普勒频移效应的影响,l=1,2,…l,l为快拍数,wl为高斯白噪声,s为发射阵列发出正交波形;利用发射信号的正交性,对接收信号xl右乘sh从而得到简化后的二维接收信号模型yl。
23、步骤三中,对二维接收信号模型堆叠处理,将二维接收信号模型变成包含目标所有信息的三维接收张量模型:三维接收张量模型为:
24、
25、其中,为三维接收张量模型;符号表示张量外积;dk是第k个目标的快拍维的矩阵;是噪声张量,m为发射传感器个数,n为接收传感器个数;a(θk)为发射的导向向量,θk表示第k个目标的发射角度(dod);为接收的导向向量,表示第k个目标的到达角度(doa)。
26、步骤四张量分解得到目标中包含每一参数维度的信号矩阵的过程如下:
27、引入张量分解的定理,对于由k个目标分量和三个参数维度组成的三维接收张量模型其目标是计算出其最接近的分解,即:
28、且
29、其中,min为最小化函数,为三维接收张量模型的近似估计值;b,a,d为分解后每一参数维度的信号矩阵,b表示包含目标到达角信息的矩阵,a表示包含目标发射角信息的矩阵,d表示包含目标速度信息的矩阵。
30、步骤五包括:
31、将张量分解后的解耦模型通过快速迭代算法,输出精确估计的矩阵t;
32、将t按照vandermonde分解,即可得到精确估计的第k个目标的dod角度信息、第k个目标的doa信息和速度信息νk。
33、建立als分解后一维参数估计的模型:
34、ak=x+w
35、其中,ak为dod维度信号矩阵近似估计值a中第k个目标;x为理想情况下dod的因子;w为张量分量后残余的噪声;
36、定义ak的原子集为:
37、
38、其中,a(θ)为原子集的组成元素;
39、为精确从ak中估计x,建立anm模型为:
40、
41、其中,inf{·}表示下界,a(θl)为(θ)中基向量元素,ηl为利用a(θl)进行重构x的系数;
42、将上述问题转化为半正定规划问题,μ代表正则化参数;
43、
44、
45、其中,min为最小化函数,f范数为矩阵的欧式范数,即矩阵所有元素的平方和的算术平方根;v表示理想情况下dod因子x中的第一个元素,m为参数矩阵a的维度,tr(·)表示矩阵迹的运算符,t(u)为toeplitz矩阵,其中包含a的关键信息,为待求信息项;
46、基于apg算法,提取出anm的三个重要的性质,并通过迭代和原子软阈值收缩,将问题重新表述为无约束问题:
47、
48、其中,c(z)是惩罚函数;当z≥0时,c(z)=0;否则c(z)=∞;可微;
49、基于anm的快速迭代算法,其中包含了提取anm的vandermonde分解、半正定结构和低秩性的过程;
50、vandermonde分解:对于任意toeplitz结构的矩阵t,如果维度为m×m的厄米特toeplitz矩阵t是半正定的,且其秩满足r≤m,则被分解为:
51、
52、半正定结构:根据舒尔补定理,由sdp问题中的psd性质说明:
53、v≥0,t≥v-1xxh
54、低秩性:由vandermonde分解和半正定结构可知,矩阵t的任意特征值λi≥0;因此anm最小化问题中部分转化为:
55、mintr(t)≡min||λ||1
56、通过转化最小化问题,得到矩阵t的低秩特性解。
57、与现有技术相比,本发明的有益效果具体体现在:
58、1)本发明通过构建双基地mimo雷达的三维系统模型,相对于双基地mimo雷达的二维系统模型而言,可以同时估计出目标的dod角度、doa角度以及运动速度。
59、2)本发明采用张量分解对接收信号进行多参数解耦,相比传统的二维解耦方法,减小解耦分离多参数过程的误差。
60、3)本发明采用基于anm的快速迭代算法对解耦后参数进行进一步估计,相比于cs类算法没有网格失配效应,相比于传统anm算法,保留精度的同时降低了算法复杂度。
61、4)本发明的高效定位算法,通过后续实验表明,可适用于超大规模mimo阵列进行定位估计,具有研究意义。
- 还没有人留言评论。精彩留言会获得点赞!