一种动态称重系统小样本跨设备故障诊断系统和方法
本发明涉及智能交通,具体涉及一种动态称重系统小样本跨设备故障诊断系统和方法。
背景技术:
1、作为公路治超称重和港口码头货物计量等领域中的重要保护和控制设备,动态称重系统的运行状态直接关乎着货物计量准确性和经济效益,甚至影响交通安全。然而由于其每天要承受上万次重型货车的加载与卸载循环冲击,易出现偏差故障、冲击故障、漂移故障、卡死故障以及精度下降故障等多种形式故障。为此加强对动态称重系统机械状态监测和故障诊断具有重要意义。
2、现有的动态称重系统故障诊断方法多是依靠人工测量,不仅过程繁琐,需要检测人员携带设备进入现场,还需要进行逐一排查,耗费人力物力,严重时还需要停止整个称重系统的运行,造成难以避免的经济损失。由于振动信号蕴含大量机械部件状态信息,利用非侵入式振动信号辨识机械状态的方法得到广泛研究。传统数据驱动故障诊断方法先通过特征工程构建故障表征特征而后通过分类器进行故障分类。虽然在其特定的研究对象上,该方法取得了一定的成效,但是特征工程依赖专家经验且上述方法泛化能力不强。
3、迁移学习是运用已有知识对不同但相关的领域问题进行求解的一种新的机器学习的方法。迁移学习虽然能够提升分类精度,大多为同类设备之间的跨设备迁移,无法从根源上解决现场数据匮乏的小样本故障诊断问题。
4、称重传感器是动态称重系统的关键组成部分,其通过并联方式,将多路称重传感器的输出信号累加,构成一个典型的多传感器系统。提出了一种新型动态称重系统小样本跨设备故障诊断系统和方法,所述方法中的跨传感器迁移是指通过利用单传感器设备的数据来增强或扩展多传感器系统的故障诊断能力。通过将单传感器数据迁移到多传感器系统,可以利用不同传感器之间的互补信息来提高故障诊断的准确性和鲁棒性。这种迁移过程可以帮助充分利用实验室条件下的可以人为设置的故障单传感器数据,并将其应用于更复杂且故障数据匮乏的多传感器环境中,从而提供更全面和可靠的故障诊断结果。
技术实现思路
1、本发明的目的在于解决上述问题,提供一种动态称重系统小样本跨设备故障诊断系统和方法。
2、为实现上述目的,本发明的技术方案是:一种动态称重系统小样本跨设备故障诊断系统,包括:一电动缸、一伺服电机、一伺服驱动器、一运动控制卡、二数据采集卡、一参考传感器、六称重传感器、一称台上面板、一称台下面板、一上位机;
3、所述伺服电机的编码线与所述伺服驱动器连接,伺服驱动器再与所述运动控制卡连接,完成伺服电机的运动控制;所述电动缸与所述伺服电机配合,完成运动的仿真;所述称重传感器和所述参考传感器分别与两个所述数据采集卡连接,完成信号的采集;两个所述数据采集卡与所述上位机连接,完成信号的处理和分析,实现故障的实时诊断;
4、所述上位机包括:
5、源域数据采集模块:用于称重传感器各种故障输出信号的采集,获得第一数据集;
6、目标域数据采集模块:用于动态称重系统输出信号的采集,获得第二数据集;
7、数据迁移模块:用于建立数据集之间互相迁移的实现,通过降低数据间的分布来提高数据的关联性;
8、故障诊断模块:对迁移后的数据进行学习,并实时检测,数据进行处理后得到数据样本,将数据样本输入训练后的故障诊断模型,最终得到动态称重系统的故障结果。
9、在本发明一实施例中,所述动态称重系统是一种能够动态称重的多传感器系统。
10、本发明还提供了一种动态称重系统小样本跨设备故障诊断方法,采用如上所述的一种新型动态称重系统小样本跨设备故障诊断系统,该方法包括以下步骤:
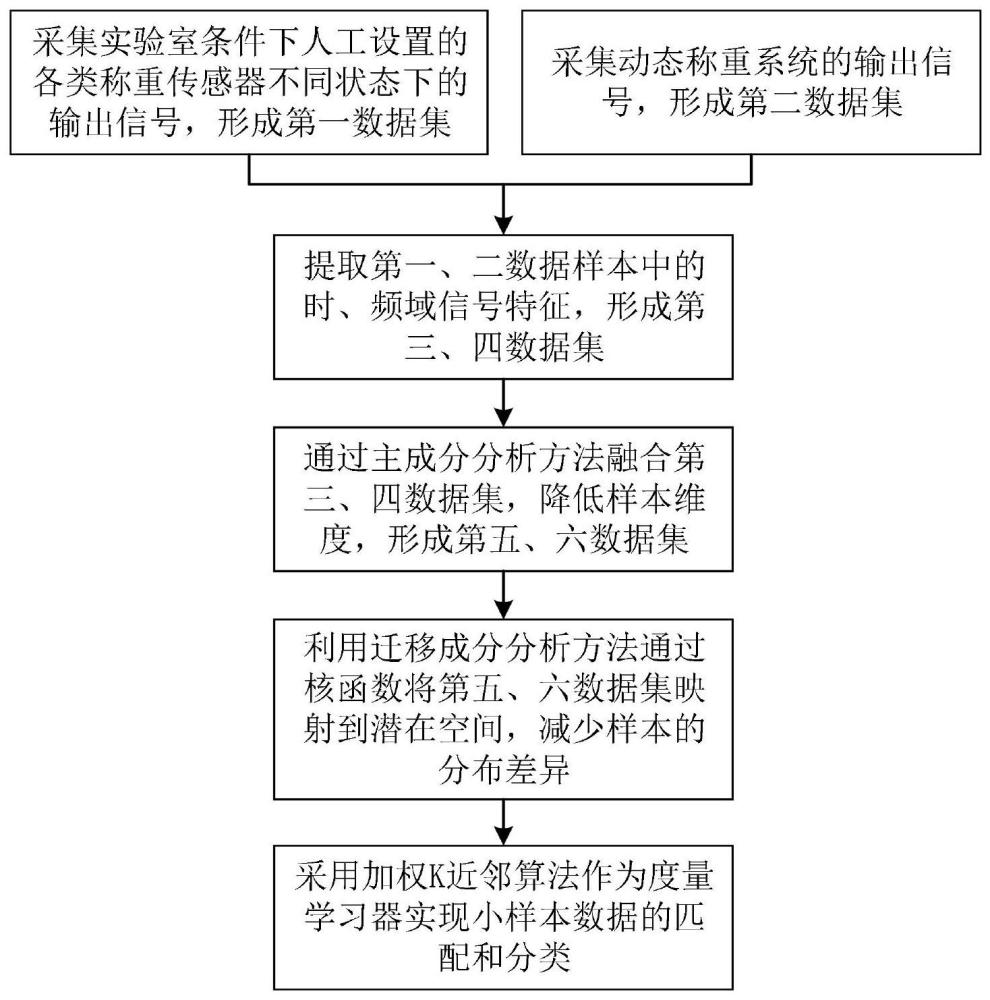
11、步骤1、采集实验室环境下人工设置的各类称重传感器不同故障状态下的输出信号和正常工作下的动态称重系统输出信号,再分别进行打标签处理,形成第一数据集和第二数据集;
12、步骤2、提取第一数据集、第二数据集数据样本中的时、频域信号特征形成第三数据集、第四数据集;
13、步骤3、通过主成分分析方法计算融合第三数据集、第四数据集,降低其样本维度,共同作为模型的输入特征向量,形成第五数据集、第六数据集;
14、步骤4、利用迁移成分分析方法通过核函数将第五数据集、第六数据集映射到潜在的希尔伯特空间,减少样本的分布差异性;
15、步骤5、采用加权k近邻算法作为度量学习器实现小样本数据的匹配和分类。
16、在本发明一实施例中,所述第一数据集、第二数据集分别为一个n×m和l×m的矩阵,其中,n、l为所测数据的样本数,且l<<n;m为样本维数,即样本的采集点数目。
17、在本发明一实施例中,所述方法中实现跨传感器迁移,是指通过利用单传感器设备的数据来增强或扩展多传感器系统的故障诊断能力;通过将单传感器数据迁移到多传感器系统,能够利用不同传感器之间的互补信息来提高故障诊断的准确性和鲁棒性。
18、在本发明一实施例中,所述不同故障状态包括正常、偏差故障、冲击故障、漂移故障、卡死故障以及精度下降故障这六种状态,且分别采用1、2、3、4、5、6来表示对应状态,并为其打标签。
19、在本发明一实施例中,所述步骤2具体实现如下:
20、第一数据集、第二数据集数据样本中的时、频域信号特征包括均方根值yrms、平均幅值y*、波形指标k、峰值指标c、脉冲指标i、峭度指标yq、裕度指标l、均值频率重心频率fmc、均方根频率frmsf、标准差频率frvf,其计算公式分别为:
21、
22、
23、
24、
25、
26、
27、
28、
29、
30、
31、
32、公式中,yi表示单样本中的采集点的值;m表示样本维度;fi表示功率谱第i条谱线的频率值;
33、得到的第三数据集、第四数据集为:
34、
35、
36、n、l为第一数据集、第二数据集所测数据的样本数;下标1、2、……、n、l分别表示第三数据集、第四数据集中第1、2、……、n、l个样本。
37、在本发明一实施例中,所述步骤4具体为:
38、步骤401、迁移成分分析方法tca利用最大均值差异mmd来计算源域即第五数据集和目标域即第六数据集之间的距离dtca(xs,xt):
39、
40、其中,xs,xt分别表示源域和目标域内的数据样本,ns,nt分别表示源域和目标域中的样本个数,h表示再生核希尔伯特空间,φtca为映射函数,xi、yi分别表示xs和xt中的第i和j个样本;
41、步骤402、当计算得到的距离dtca(xs,xt)越小,源域和目标域之间的通过映射后的数据分布就越相似;为求出最佳映射φtca,需从数学上引入核矩阵k进行变换,如下式所示:
42、
43、其中,ks.s、ks.t、kt,t分别表示通过映射φtca空间上的源域、跨域和目标域数据的核函数,kt.s=ks.t,s为参考矩阵;
44、步骤403、引入条件矩阵l,tca将迁移学习中的源域和目标域之间的距离转换为:
45、
46、其中,λ≥0,为权衡参数,tr是求矩阵的迹,是一种数学符号;
47、步骤404、通过统一核函数将两个样本集的特征映射到同一个核空间;首先在核空间上映射,核矩阵分解为:
48、k=(kk-1/2)(k-1/2k) (16)
49、步骤405、为简化核矩阵k,引入一个更低维度的矩阵将核映射到m维(m<<ns+nt)空间上,因此核矩阵转化成:
50、
51、其中,
52、步骤406、正则化项tr(wtw)来控制w的复杂度,为最小化上述方程,将核学习简化为:
53、
54、其中,μ为权衡参数;
55、综上,tca转化为一个优化问题,表示最小化源域和目标域之间的距离,且维持源于和目标域数据之间的散度不变;即tca的迁移目标:在保持源域和目标域之间原始数据的特性属性不变的基础上,尽可能的减少分布差异。
56、在本发明一实施例中,所述步骤5具体为:
57、步骤501、数据归一化处理:已有n个样本,每个样本包含d个具体特征值,对每个特征xid(i=1,2,...,n)进行正向化,其构成的矩阵记为
58、
59、对每一个特征xid(i=1,2,...,n)进行标准化,标准化后记为公式如下:
60、
61、max{|x1j|,...,|xnj|}代表正向化d维特征值中的最大值,min{|x1j|,...,|xnj|}对应为最小值;
62、步骤502、获取每一个特征值所占比重:计算特征值的比重,以概率的形式呈现,每一项特征值的概率以pij表示:
63、
64、步骤503、计算每一项特征值的熵值:利用概率pij来计算第j个特征值的信息熵ej,特征值的信息熵越大,则对算法的重要程度越低,反之则越高;
65、
66、步骤504、计算每一项特征值的权重:根据信息熵,得到每一项特征值指标的权重ωj为:
67、
68、相较于现有技术,本发明具有以下有益效果:本发明解决了实际情况下动态称重系统因故障数据不足而导致诊断精度下降的问题,解决了动态称重系统因样本限制而导致的同类设备之间无法实现数据迁移的问题,为动态称重系统的小样本故障诊断提供了一种基于人工智能的新方法,提高了安全生产效率和降低了经济损失。
- 还没有人留言评论。精彩留言会获得点赞!