基于四象限传感器的激光光斑定位方法、系统及实验平台与流程
本发明涉及激光定位检测,尤其涉及一种基于四象限传感器的激光光斑定位方法、系统及实验平台。
背景技术:
1、激光定位检测技术在激光制导、空间光通信、大尺寸精密测量等领域有着广泛的应用。与无线传感器网络、惯性导航定位等其他非接触式定位方法相比,激光跟踪定位具有精度高、环境适应性强等优点。目前,激光跟踪仪已广泛应用于运动目标跟踪;其测距精度已超过亚微米尺度,测量距离可达数百米。但随着科技发展和工业进步,越来越多的工况检测领域需要更高精度的激光定位技术方能满足其实际需求。
2、激光定位检测技术通常是将包含位置信息的光信号转换成电信号后进行算法处理以获得传感器光敏面上光斑质心实际位置的一种检测技术。通过激光器发射激光脉冲,照射到被测物体后反射激光信号,原路返回的反射激光信号照射在四象限传感器的中心。但是当被测物体发生移动时,反射光会经过光路在四象限传感器上产生一个偏离值,即光斑偏移量。通过光电转换电路,接收检测目标反射的光信号,并将其转换为对应的电信号。由控制器对光斑偏移量进行求解后,基于初始光斑位置,通过操作舵机控制光斑质心始终保持在四象限传感器光敏面的中心位置,完成实时性闭环定位。
3、四象限传感器是一种可满足激光准直和定位跟踪等要求的特定光电位置传感器,它利用光刻技术将传感器光敏面分成形状相同面积相等的四块也就是笛卡尔坐标系,形成四个象限。当激光光斑映射在四象限传感器的光敏面上时,各象限会将入射光强转换成相应的光电信号输出,通过对四象限信号进行算法处理,可确定入射光斑的偏移量,实现光斑的定位。现有的光斑偏移量计算方法包括解析法、中心近似检测法、多项式拟合法、数据库查询法和几何近似法等。这些方法将光斑视为理想圆斑时,忽略带材暗区,未考虑系统随机误差的影响,导致通过现有方法确定的光斑位置与实际光斑位置存在一定误差,精度较低。
4、以上背景技术内容的公开仅用于辅助理解本发明的发明构思及技术方案,其并不必然属于本专利申请的现有技术,也不必然会给出技术教导;在没有明确的证据表明上述内容在本专利申请的申请日之前已经公开的情况下,上述背景技术不应当用于评价本技术的新颖性和创造性。
技术实现思路
1、本发明的目的是提供一种基于四象限传感器的激光光斑定位方法及系统,能够精确、实时地计算光斑偏移量,提高激光器的定位精度和定位速度。
2、为达到上述目的,本发明采用的技术方案如下:
3、一种基于四象限传感器的激光光斑定位方法,包括以下步骤:
4、以四象限传感器的光敏面的中心为原点,以通过所述光敏面的中心的两条垂直线为x轴和y轴确定四象限传感器坐标系xoy,配置一激光照射在所述光敏面上,在所述光敏面上获取一光斑;
5、获取所述四象限传感器的四个象限的光电流信号,并根据所述光电流信号确定所述光斑投射在所述坐标系xoy的第一象限、第二象限、第三象限和第四象限的光斑面积s1、s2、s3和s4,以及确定所述光斑的中心坐标(x0,y0)和半径r;
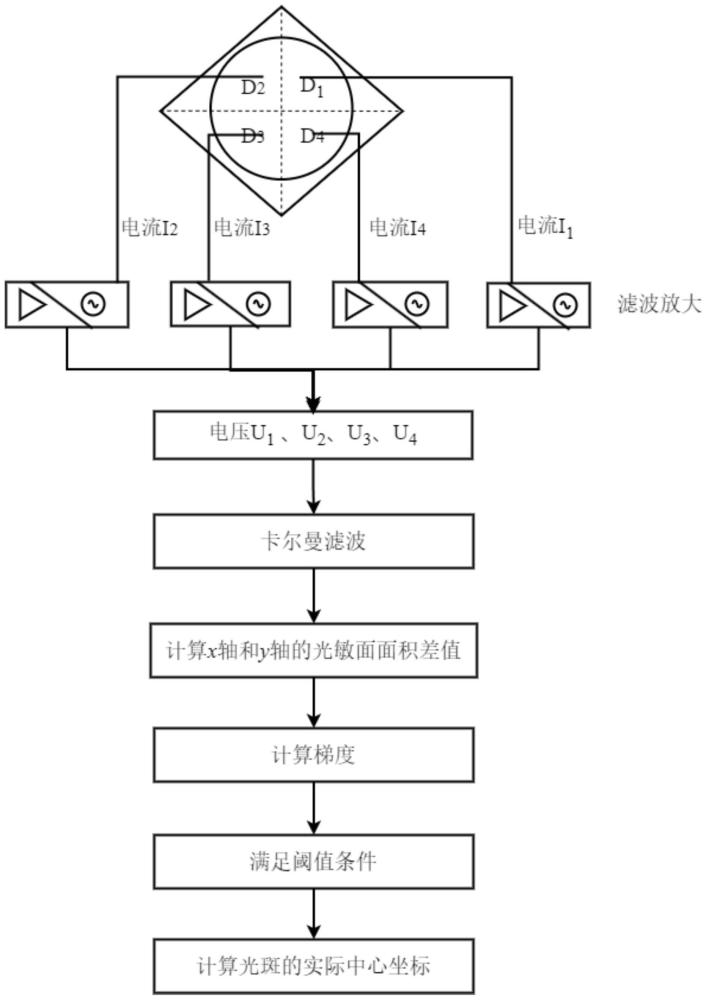
6、确定所述光斑在x轴方向光面积差值sx和y轴方向的光面积差值sy,其中,sx=(s1+s4)-(s2+s3),sy=(s1+s2)-(s3+s4);
7、根据x轴方向光面积差值sx和y轴方向的光面积差值sy确定所述光斑的中心的梯度大小mag(x0,y0)和梯度方向α(x0,y0);
8、若所述光斑的中心的梯度大小mag(x0,y0)大于预设的梯度阈值,则基于所述光斑的中心的梯度大小mag(x0,y0)和梯度方向α(x0,y0)对所述中心坐标(x0,y0)进行修正,以获得所述光斑的实际中心坐标(δx,δy),其中,δx=x0+rcos(α(x0,y0)),δy=y0+rsin(α(x0,y0))。
9、进一步地,承前所述的任一技术方案或多个技术方案的组合,通过以下方式确定所述光斑的中心的梯度大小mag(x0,y0)和梯度方向α(x0,y0):
10、根据x轴方向光面积差值sx和y轴方向的光面积差值sy确定所述光斑的梯度其中,其为所述光斑在x方向的梯度,其为所述光斑在y方向的梯度;
11、确定所述光斑的中心的梯度大小mag(x0,y0)和梯度方向α(x0,y0),其中,α(x0,y0)=arctan(gx(x0,y0)/gy(x0,y0))。
12、进一步地,承前所述的任一技术方案或多个技术方案的组合,在确定所述光斑的实际中心坐标(δx,δy)之后,还包括以下步骤:
13、调节所述激光的照射方向相对于所述坐标系xoy偏移(-δx,-δy),以使所述激光照射在所述光敏面的中心。
14、进一步地,承前所述的任一技术方案或多个技术方案的组合,若所述光斑的中心的梯度大小mag(x0,y0)不大于预设的梯度阈值,则重新配置一激光照射在所述光敏面上,并重新获取所述光斑的实际中心坐标(δx,δy)。
15、进一步地,承前所述的任一技术方案或多个技术方案的组合,获取所述四象限传感器的四个象限的光电流信号,并根据基于所述光电流信号确定所述光斑投射在所述坐标系xoy的第一象限、第二象限、第三象限和第四象限的光斑面积s1、s2、s3和s4,包括以下步骤:
16、获取所述四象限传感器的第一象限、第二象限、第三象限和第四象限分别输出的光电流信号i1、i2、i3和i4;
17、对所述光电流信号i1、i2、i3和i4进行放大处理并转换为电压信号u1、u2、u3和u4,uj=βij(j=1,2,3,4),其中,β为增益;
18、基于所述四象限传感器各象限的光电流信号与激光投射在光敏面上的面积成正比,确定所述光斑面积s1、s2、s3和s4与各象限输出电压u1、u2、u3和u4之间的关系为uj=βksj(j=1,2,3,4),其中,k为光电流信号和光斑面积的比例系数。
19、进一步地,承前所述的任一技术方案或多个技术方案的组合,对所述光电流信号进行放大处理并转换为电压信号之后,还包括对所述电压信号进行卡尔曼滤波处理。
20、进一步地,承前所述的任一技术方案或多个技术方案的组合,所述光斑面积s1、s2、s3和s4与所述光斑的中心坐标(x0,y0)和半径r满足以下关系:
21、
22、
23、
24、
25、进一步地,承前所述的任一技术方案或多个技术方案的组合,还包括通过以下方式验证所述激光光斑定位方法的定位精度:
26、配置四象限传感器在一精密转台上,并且配置所述四象限传感器的坐标系xoy与所述精密转台的坐标系mon相重合;
27、配置激光器向所述四象限传感器的光敏面的中心照射激光,在所述光敏面的中心处形成一光斑;
28、配置所述精密转台控制所述四象限传感器沿x轴方向和/或y轴方向偏移距离(δx0,δy0);
29、采集所述四象限传感器的四个象限分别输出的光电流信号,并对所述光电流信号进行放大处理、转换为电压信号以及卡尔曼滤波处理,获得四象限对应的电压信号;
30、采用所述四象限传感器的激光光斑定位方法,根据所述电压信号计算所述光斑的实际中心坐标(δx,δy);
31、对比所述光斑的实际中心坐标(δx,δy)和所述四象限传感器的偏移距离(δx0,δy0),确定所述的基于四象限传感器的激光光斑定位方法的定位精度。
32、进一步地,承前所述的任一技术方案或多个技术方案的组合,所述光斑中各点的光强相同;和/或,
33、所述光斑的边界为一中心坐标为(x0,y0)、半径为r的圆,所述光斑中任意一点(x,y)满足以下关系式:(x-x0)2+(y-y0)2≤r2。
34、根据本发明的另一方面,本发明提供了一种基于四象限传感器的激光光斑定位系统,,利用如上任一技术方案或多个技术方案的组合所述的基于四象限传感器的激光光斑定位方法确定四象限传感器的光敏面上的光斑的实际中心坐标,所述系统包括激光器、光束调整模块、四象限传感器、电流电压转换模块和控制模块,其中:
35、所述激光器,其被配置为向所述四象限传感器的光敏面发射一束激光,以使所述光敏面获取光斑;
36、所述四象限传感器,其输出端与所述电流电压转换模块的输入端电连接,其被配置为向所述电流电压转换模块输出其四个象限的光电流信号;
37、所述电流电压转换模块,其输出端与所述控制模块的输入端电连接,其被配置为将所述光电流信号放大并转换为电压信号,并且将所述电压信号传输至所述控制模块;
38、所述控制模块,其输出端与所述光束调整模块的输入端电连接,其被配置为根据所述电压信号确定所述光斑的实际中心坐标(δx,δy),并向所述光束调整模块输出控制指令;
39、所述光束调整模块,包括用于调节激光光路的舵机,所述舵机被配置为响应于接收到所述控制指令后转动,以调节所述激光器的照射方向相对于四象限传感器坐标系偏移(-δx,-δy)。
40、进一步地,承前所述的任一技术方案或多个技术方案的组合,所述系统还包括卡尔曼滤波模块,所述卡尔曼滤波模块的输入端与所述电流电压转换模块的输出端电连接,其输出端与所述控制模块的输入端电连接,其被配置为对所述电压信号进行卡尔曼滤波处理并传输至所述控制模块,以滤除背景光噪声和暗电流噪声。
41、进一步地,承前所述的任一技术方案或多个技术方案的组合,,所述控制模块根据所述电压信号确定所述光斑的实际中心坐标(δx,δy),包括以下步骤:
42、根据所述电压信号确定所述光斑投射在四象限传感器坐标系xoy的第一象限、第二象限、第三象限和第四象限的光斑面积s1、s2、s3和s4,以及确定所述光斑的中心坐标(x0,y0)和半径r;
43、确定所述光斑在x轴方向光面积差值sx和y轴方向的光面积差值sy,其中,sx=(s1+s4)-(s2+s3),sy=(s1+s2)-(s3+s4);
44、根据x轴方向光面积差值sx和y轴方向的光面积差值sy确定所述光斑的中心的梯度大小mag(x0,y0)和梯度方向α(x0,y0);
45、若所述光斑的中心的梯度大小mag(x0,y0)大于预设的梯度阈值,则基于所述光斑的中心的梯度大小mag(x0,y0)和梯度方向α(x0,y0)对所述中心坐标(x0,y0)进行修正,以获得所述光斑的实际中心坐标(δx,δy),其中,δx=x0+rcos(α(x0,y0)),δy=y0+rsin(α(x0,y0))。
46、进一步地,承前所述的任一技术方案或多个技术方案的组合,所述系统还包括模数转换模块,所述模数转换模块的输入端与所述卡尔曼滤波模块的输出端电连接,其输出端与所述控制模块的输入端,其被配置为将卡尔曼滤波处理后的电压信号从模拟信号转换为数字信号并传输至所述控制模块;和/或,
47、所述系统还包括光路系统、透镜和光学镜头,所述激光器的发射光依次通过所述光路系统、所述透镜和所述光学镜头后照射在所述四象限传感器的光敏面上;所述光路系统的光传递路径可调节,所述光束调整模块被配置为调节所述光路系统的光传递路径,以使所述激光器的照射方向为目标照射方向。
48、根据本发明的另一方面,本发明提供了一种基于四象限传感器的激光光斑定位实验平台,包括激光器、光路系统、四象限传感器、精密转台、信号处理模块和计算机,所述实验平台按照以下方法对如上任一技术方案或多个技术方案的组合所述的基于四象限传感器的激光光斑定位方法进行验证,包括:
49、所述四象限传感器设置在所述精密转台上,配置所述四象限传感器的坐标系xoy与所述精密转台的坐标系mon相重合;
50、配置所述激光器向所述四象限传感器发射一束照射光,所述照射光经过所述光路系统照射在所述四象限传感器的光敏面的中心处,在所述光敏面的中心处形成一光斑;
51、配置所述精密转台控制所述四象限传感器沿x轴方向和/或y轴方向偏移距离(δx0,δy0);
52、通过所述信号处理模块采集所述四象限传感器的四个象限输出的光电流信号,并对所述光电流信号进行放大处理、转换为电压信号和卡尔曼滤波处理得到四个象限对应输出的电压信号,并将所述电压信号输出至所述计算机;
53、所述计算机利用所述的基于四象限传感器的激光光斑定位方法计算所述光斑的实际中心坐标(δx,δy);
54、对比所述光斑的实际中心坐标(δx,δy)和所述四象限传感器的偏移距离(δx0,δy0),确定所述的基于四象限传感器的激光光斑定位方法的定位精度。
55、本发明提供的技术方案带来的有益效果如下:
56、a.本发明提供的激光光斑定位方法根据四象限传感器的四个象限输出的光电流信号获取光斑在x轴和y轴的光面积差值,并基于光面积差值计算光斑的梯度,将光斑的中心的梯度值与预设的梯度值进行比对,针对光斑的中心的梯度值大于预设的梯度值,利用梯度对光斑的中心坐标进行修正,能够获得更接近真实值的光斑的实际中心坐标,能够提高光斑偏移量的计算精度,提高激光光斑的定位精度;
57、b.本发明将光斑的中心的梯度值不大于预设的梯度值对应的数据舍弃,能够剔除无效数据,进一步提高激光光斑的定位精度;
58、c.本发明提供的激光光斑定位方法算法简单,易于实现,能够实时地获得更接近真实值的光斑的实际中心坐标即光斑的偏移量,提高光斑定位速度;
59、d.本发明通过对电压信号进行卡尔曼滤波处理,能够从一系列有随机误差的数据中得到最佳的电压信号,从而降低计算误差,提高光斑位置的计算精度。
- 还没有人留言评论。精彩留言会获得点赞!