一种基于航迹负反馈的点云密度增强方法及系统与流程
本技术涉及雷达信号处理,尤其是涉及一种基于航迹负反馈的点云密度增强方法及系统。
背景技术:
1、交通雷达是一种常用的传感器,用于在交通领域中实现目标检测、跟踪和航迹稳定等功能,然而,为了提升雷达的最远探测距离,常常会降低雷达的距离分辨率,导致目标的点云密度变差,同时,雷达的散射点会随着目标的运动发生改变,聚类结果容易造成目标分裂和误差较大的问题。
2、在实际的雷达工作中,雷达的带宽是一个已经确定的参数,决定了雷达的距离分辨率。距离分辨率表示雷达能够分辨的两个不同目标之间的最小距离,一般来说,较高的距离分辨率能够提供更精细的目标距离测量,但同时也限制了雷达的最远探测距离。
3、由于距离分辨率的限制,目标的点云密度在远距离上会变得很差,无法满足航迹稳定度和跟踪精度的要求,此外,目标的运动会导致雷达散射点的动态变化,这在进行目标聚类时容易造成目标分裂和误差较大的问题。
4、目前尚无一种能够提升雷达点云密度的方式或方法,因为雷达的距离分辨率已经在实际工作中确定,并由雷达的工作带宽决定。因此,需要在设计和优化雷达系统时权衡最远探测距离和点云密度之间的折衷,并寻求其他方法来改善目标的跟踪和航迹稳定性。
技术实现思路
1、针对上述技术问题,本技术提出一种基于航迹负反馈的点云密度增强方法及系统。
2、第一方面,本技术提供一种基于航迹负反馈的点云密度增强方法,包括:
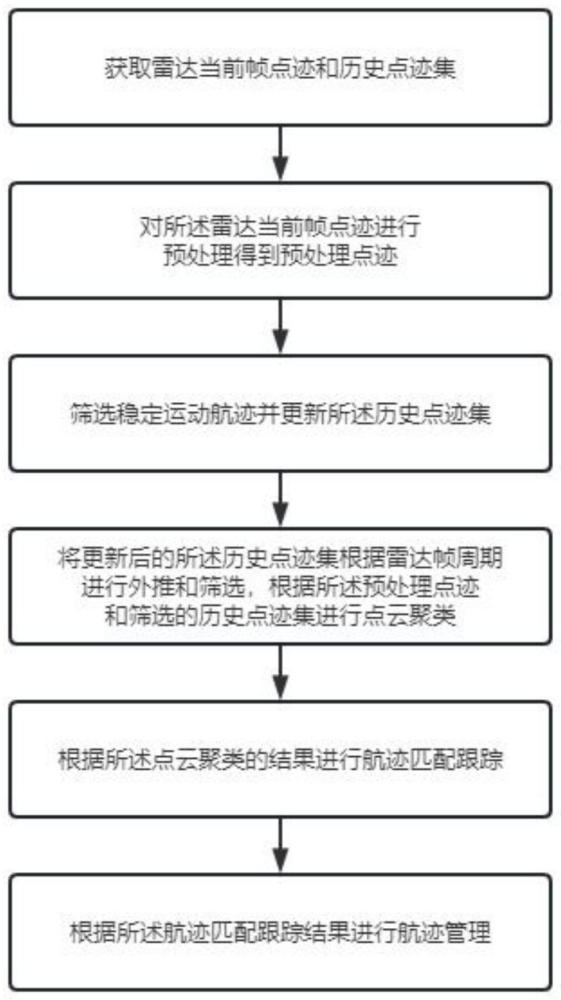
3、s1:获取雷达当前帧点迹和历史点迹集。
4、s2:对所述雷达当前帧点迹进行预处理得到预处理点迹。
5、优选地,所述预处理,具体为:去除无效点迹和跳动点迹,将雷达当前帧的点迹从雷达坐标系转换到目标坐标系,进行点迹信息的运动补偿及物体特征提取;
6、其中,根据雷达设备的特性和预设条件,如设置信噪比阈值、动态范围等方式进行判定和剔除信号过弱或不符合条件的无效点迹;通过采用滤波算法,如卡尔曼滤波、中值滤波等方式对点迹进行平滑处理,去除不符合物体运动规律的跳动点迹;目标坐标系可以是平面直角坐标系或经纬度坐标系;根据点迹携带的速度信息,对点迹位置进行运动补偿,修正点迹位置,提高点迹的准确性;从预处理后的点迹中提取物体的特征信息,如位置、速度、加速度等,可用于后续的目标追踪、识别、分类等。
7、s3:筛选稳定运动航迹并更新所述历史点迹集。
8、优选地,所述步骤s3,具体为:
9、s301:获取稳定运动航迹对应的点迹;
10、s302:基于所述点迹的存在时间或持续观测的帧数,计算所述点迹的生存周期;其中,所述点迹的生存周期指点迹在连续帧中存在的帧数;
11、s303:设置第一生存周期阈值,筛选生命周期大于所述生命周期阈值的航迹;
12、进一步的,若生命周期大于第一生存周期阈值,则将其认定为稳定的运动航迹对应的点迹;
13、s304:将大于生命周期阈值的所述航迹所对应的点迹信息更新到历史点迹集;其中,所述点迹信息至少包括位置和速度;
14、进一步的,对于未被筛选出来的航迹,可以根据具体需求进行相应处理,如移除、标记或进行进一步分析;
15、s305:将大于生命周期阈值的所述航迹的点迹的生存周期设置为1。
16、s4:将更新后的所述历史点迹集根据雷达帧周期进行外推和筛选,根据所述预处理点迹和筛选的历史点迹集进行点云聚类。
17、优选地,所述将更新后的所述历史点迹集根据雷达帧周期进行外推,具体为:
18、s401:获取雷达帧周期及更新后的历史点迹集中的每个点迹的当前位置和速度;
19、s402:根据所述速度和雷达帧周期间隔的乘积,得到在所述雷达帧周期间隔内每个点迹的位移;
20、s403:将点迹的当前位置和位移相加,得到点迹在下一帧中的位置,更新至历史点迹集;
21、s404:外推后的历史点迹集的每个点迹生存周期增加1;
22、进一步的,将其生命周期加1,表示点迹的生存周期延长了一个帧周期。
23、优选地,所述将更新后的所述历史点迹集根据雷达帧周期进行筛选,具体为:遍历外推后的历史点迹集中的每个点迹,设置第二生命周期阈值,判断所述每个点迹的生命周期是否小于等于第二生命周期阈值,若点迹的生命周期小于等于第二生命周期阈值,则保留该点迹至历史点迹集,否则剔除该点迹。
24、优选地,所述根据所述预处理点迹和筛选的历史点迹集进行点云聚类,具体为:将所述预处理点迹和筛选的历史点迹集合并为一个点云数据集,使用点云dbscan聚类对所述点云数据集进行聚类,将密度相似的点划分为不同的聚类簇,并将未被访问的点识别为噪声点。
25、优选地,dbscan是一种基于密度的聚类算法,可以将密度相邻的点分为一个簇。
26、优选地,dbscan聚类算法的调整参数至少包括最小样本数(minpts)和邻域半径(ε)。
27、优选地,所述根据所述预处理点迹和筛选的历史点迹集进行点云聚类,还包括:遍历所述点云数据集中的每个聚类簇,计算并输出聚类簇中的数学均值中心点;
28、其中,对于每个聚类簇,初始化设定位置累加变量和点迹计数变量为0,遍历所述聚类簇中的每个点迹,若点迹与当前聚类簇匹配,则将所述点迹的位置信息累加初始化的所述位置累加变量,同时增加初始化的所述点迹计数变量,所述数学均值中心点等于累加后的点迹的位置信息除以累加后的点迹计数变量。
29、s5:根据所述点云聚类的结果进行航迹匹配跟踪。
30、优选地,所述步骤s5,具体为:
31、s501:初始化航迹列表,通过创建一个空的航迹列表,用于存储当前帧中的航迹信息;
32、s502:获取每个聚类簇的数学均值中心点;
33、s503:遍历所述航迹列表中的每个航迹;
34、s504:计算航迹与当前聚类簇的数学均值中心点之间的距离,找到距离最短的航迹;
35、其中,通过使用适当的距离度量,如欧式距离、马氏距离等找到距离最短的航迹
36、s505:通过设定最大距离阈值,判断所述距离最短的航迹是否小于所述最大距离阈值,若所述距离最短的航迹是否小于所述最大距离阈值,则当前聚类簇与该航迹匹配,更新该航迹的状态信息,否则不匹配,将未匹配的聚类簇视为新的航迹;
37、s506:将未匹配的航迹其添加到所述航迹列表中进行扩充;
38、其中,将未匹配的聚类簇视为新的航迹,将其添加到航迹列表中,进行进一步的追踪;
39、s507:定时清理过时航迹;
40、其中,根据航迹的更新时间或其他设定的过时条件,定时清理超过一定时间或不再满足条件的航迹,以确保航迹列表中保持最新和有效的航迹信息。
41、s6:根据所述航迹匹配跟踪结果进行航迹管理。
42、优选地,所述航迹管理包括航迹更新、航迹关联、航迹生成与终止、航迹分析与预测、航迹存储和查询等。
43、第二方面,本技术还提供一种基于航迹负反馈的点云密度增强系统,所述系统包括:
44、点迹获取模块,用于获取雷达当前帧的点迹;
45、点迹预处理模块,去除无效点迹和跳动点迹,将雷达当前帧的点迹从雷达坐标系转换到目标坐标系,进行点迹信息的运动补偿及物体特征提取,得到精确可靠的点迹信息以及连续的航迹信息;
46、历史点迹集更新模块;根据稳定的运动航迹和根据雷达周期实现历史点迹集的更新;
47、航迹匹配跟踪模块:可以连续的跟踪并更新目标的运动状态;
48、航迹管理模块,用于管理和维护航迹信息。
49、第三方面,本技术还提供一种计算机可读存储介质,其上存储有计算机程序,包括:
50、所述计算机程序被处理器执行时实现如上任一项所述的一种基于航迹负反馈的点云密度增强方法。
51、综上所述,本技术提出一种基于航迹负反馈的点云密度增强方法及系统,所述方法包括获取雷达当前帧点迹和历史点迹集,对所述雷达当前帧点迹进行预处理得到预处理点迹,筛选稳定运动航迹并更新所述历史点迹集,将更新后的所述历史点迹集根据雷达帧周期进行外推和筛选,根据所述预处理点迹和筛选的历史点迹集进行点云聚类,根据所述点云聚类的结果进行航迹匹配跟踪,根据所述航迹匹配跟踪结果进行航迹管理。
52、相比于现有技术,本技术具备以下技术效果:
53、本技术通过跟踪稳定的运动航迹所对应的历史点迹保留并根据其运动状态进行位置外推,将外推的后的点迹参与到当前帧的聚类和跟踪处理,能够增加点云密度,有助于提高聚类算法的准确性,同时可以有效抑制由于目标运动造成的散射点变化,提升航迹的稳定性,减少航迹追踪的误差增长,提高航迹追踪的精度。
- 还没有人留言评论。精彩留言会获得点赞!