一种基于机器视觉的施肥无人机航迹规划方法及系统
本发明属于无人机,具体涉及一种基于机器视觉的施肥无人机航迹规划方法及系统。
背景技术:
1、曹亮的《基于无人机遥感监测的施肥控制技术探究》描述了无人机中施肥存在的液滴跃现象,而牛鲁燕等人的《基于无人机多光谱遥感的小麦长势监测研究》表述了如何通过无人机对农作物长势的监测方式,施肥无人机在航测时能够通过多光谱传感器以及视觉摄像头实现对飞行轨迹下方的农作物长势进行监测,生产航迹图,之后施肥无人机根据航迹图对农作物进行定量施肥即可;
2、液滴跃现象是无人机喷洒的肥料液滴在着陆时与目标表面(通常是农作物的叶面或土壤表面)发生强烈的碰撞并迅速反弹的现象,这种跃起通常发生在肥料液滴与表面接触时,由于撞击力较大,液滴会以一定高度反弹,并可能再次着陆或在周围区域飞溅,从而导致不均匀的施肥分布,液滴跃的发生可能对施肥的效率和均匀性造成负面影响,因为跃起的液滴可能会被风吹散,也可能落在不需要肥料的地方,浪费资源;
3、但是上述方案存在以下不足:现有的无人机航测只能简单的对农作物的冠层进行视觉监测,难以对农作物的叶片疏密度以及环境因素进行了解,进而在后续喷洒液体肥料时,雾化出来的肥液颗粒会被侧向环境风带偏预设位置,以及在液滴跃的现象下使肥料不均匀分布,如何对机器视觉施肥无人机作出进一步改进,使施肥无人机在获取农作物航迹图的基础上,能够根据环境因素、农作物上肥料液的液滴跃分布情况对航迹图进行动态调整,使航迹图的调整程度进行分级设置,以提高航迹规划带来的施肥效果是当下需要改进的方向。
技术实现思路
1、本发明的目的在于提供一种基于机器视觉的施肥无人机航迹规划方法及系统,以解决上述背景技术中存在的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于机器视觉的施肥无人机航迹规划方法,包括如下步骤:
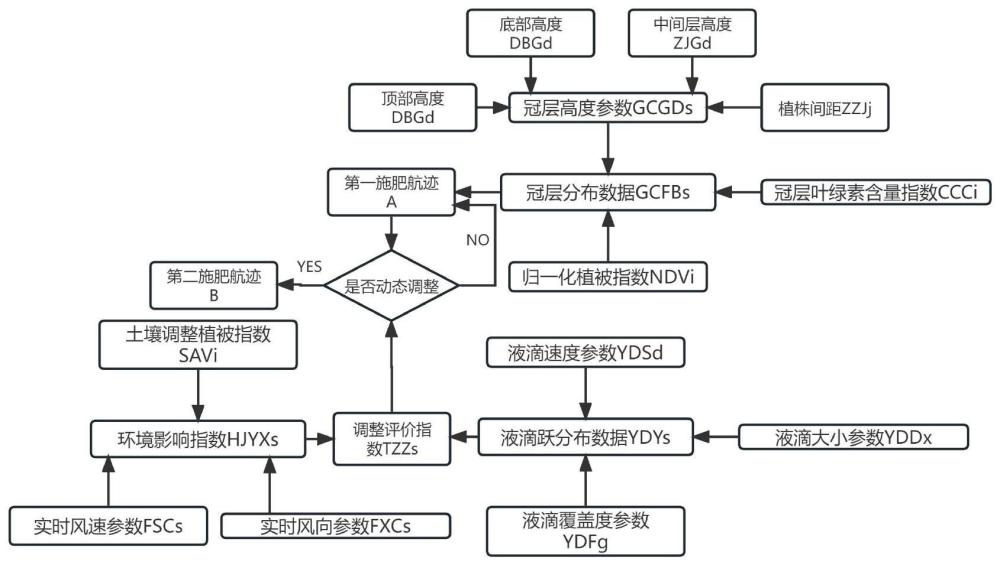
3、采集航测生成航迹图中农作物植被的冠层分布数据gcfbs,并实时获取液体肥料在植被冠层上施肥后的液滴跃分布数据ydys以及周边的环境影响指数hjyxs;
4、接收冠层分布数据gcfbs并进行分析生成第一施肥航迹a,实时获取液滴跃分布数据ydys和环境影响指数hjyxs并进行分析生成用于对第一施肥航迹a进行修改的调整评价指数tzzs;
5、处理调整评价指数tzzs与对应评估阈值进行分析比对,以对第一施肥航迹a进行分级调整并形成动态的第二施肥航迹b。
6、优选的,所述冠层分布数据gcfbs由归一化植被指数ndvi、冠层高度参数gcgds和冠层叶绿素含量指数ccci构成,
7、
8、其中δ、ε和θ为修正因子,且取值范围分别为:0.2≤δ≤0.65,0.32≤ε≤0.85,0.42≤θ≤0.75;
9、所述归一化植被指数ndvi由施肥无人机上多光谱视觉相机获取第一施肥航迹a中农作物冠层的近红外波段pnir与可见光红波段pred光谱反射率之差与两者之和的比值构成,具体公式如下:
10、
11、且—1≤ndvi≤1,冠层为绿色植被区时的ndvi取值在(0.2,1)区间;
12、所述冠层高度参数gcgds包含农作物冠层顶部高度dbgd、底部高度dbgd、中间层高度zjgd和植株间距zzjj的分布,计算公式如下:
13、gcgds=(w1×dbgd)+(w2×dbgd)+(w3×zjgd)+(w4×zjjj)
14、其中w1、w2、w3、w4均为对应的加权平均值,且0.1≤w1≤0.9,0.12≤w2≤0.85,0.21≤w3≤0.95,0.06≤w4≤0.88;
15、所述冠层叶绿素含量指数ccci在归一化植被指数ndvi的基础上将红边波段prededce代替了红色波段pred,见如下公式:
16、
17、且-1≤ccci≤1,冠层为绿色植被区时的ccci取值在(0.2,1)区间;
18、对获取的归一化植被指数ndvi、冠层高度参数gcgds和冠层叶绿素含量指数ccci进行分析处理获得第一施肥航迹a。
19、优选的,所述液滴跃分布数据ydys由液滴速度参数ydsd、液滴大小参数yddx和液滴覆盖度参数ydfg构成:
20、
21、其中a1、a2、a3为修正因子,0.12≤a1≤0.55,0.18≤a2≤0.58,0.23≤a3≤0.75;
22、所述液滴速度参数ydsd与液滴大小参数yddx通过高速摄像机获取后并进行图像分析获取,
23、液滴速度参数ydsd包括植被冠层覆盖区域的液滴速度参数ydsdgc和液滴跃至植被冠层覆盖区域外侧的液滴速度参数ydsdwc,
24、ydsd=(ydsdgc×b1)+(ydsdwc×b2)
25、其中b1和b2为权重因子,0.33≤b1≤0.45,0.62≤b2≤0.75;
26、液滴大小参数yddx包括植被冠层覆盖区域的液滴速度参数yddxgc和液滴跃至植被冠层覆盖区域外侧的液滴速度参数yddxwc,
27、yddx=(yddxgc×c1)+(yddxwc×c2)
28、其中c1和c2为权重因子,0.27≤c1≤0.59,0.38≤c2≤0.65;
29、所述液滴覆盖度参数ydfg由计算液滴实际投射在冠层表面上的面积sjbm与总表面积zmj的比例获得,具体公式如下:
30、
31、其中c为修正常数,c为正数。
32、优选的,所述环境影响指数hjyxs由土壤调整植被指数savi、实时风速参数fscs和实时风向参数fxcs构成,并获得如下计算公式:
33、
34、其中d1、d、d3为修正因子,0.24≤d1≤0.53,0.16≤d2≤0.51,0.33≤d3≤0.75;
35、所述土壤调整植被指数savi的计算公式如下:
36、
37、其中l是土壤调节系数,用来减少植被指数对不同土壤反射变化的敏感性,当l为0时,savi表示为ndvi,对于中等植被覆盖度区,l接近于0.5,乘法因子(1+l)为修订因子,使savi值与ndvi值均介于-1.0~1.0之间;
38、所述实时风速参数fscs和实时风向参数fxcs在施肥无人机施肥过程中通过外置风速、风向传感器获取。
39、优选的,所述调整评价指数tzzs的计算公式如下:
40、
41、其中m1、m2为修正因子,且取值范围分别为:0.21≤m1≤0.48,0.18≤m2≤0.88;
42、设定调整评价指数tzzs的评估阈值集合为tzzspg=(pg1、pg2…pgn),且pgn表示第n级的评估阈值范围区间值,限定1≤tzzspg≤10,设定ydys正常阈值范围为ydyszc,环境影响指数hjyxs正常阈值范围为hjyxszc;
43、当1≤tzzspg<2时,表示液滴速度参数ydsd、液滴大小参数yddx和液滴覆盖度参数ydfg构成的液滴跃分布数据ydys在正常阈值范围ydyszc内;
44、土壤调整植被指数savi、实时风速参数fscs和实时风向参数fxcs构成的环境影响指数hjyxs在正常阈值范围为hjyxszc内,施肥无人机的航迹以第一施肥航迹a为准;
45、当2≤tzzspg<4时,表示液滴速度参数ydsd、液滴大小参数yddx和液滴覆盖度参数ydfg中任意一个数值异常,构成的液滴跃分布数据ydys在正常阈值范围ydyszc之外;
46、土壤调整植被指数savi、实时风速参数fscs和实时风向参数fxcs构成的环境影响指数hjyxs在正常阈值范围为hjyxszc内,施肥无人机的航迹通过调整评价指数tzzs的评估阈值集合为tzzspg=(pg1、pg2…pgn)对应值,以调整后的第二施肥航迹b为准;
47、当4≤tzzspg<6时,表示液滴速度参数ydsd、液滴大小参数yddx和液滴覆盖度参数ydfg构成的液滴跃分布数据ydys在正常阈值范围ydyszc之内;
48、土壤调整植被指数savi、实时风速参数fscs和实时风向参数fxcs中任意一个数值异常,构成的环境影响指数hjyxs在正常阈值范围为hjyxszc之外,施肥无人机的航迹通过调整评价指数tzzs的评估阈值集合为tzzspg=(pg1、pg1…pgn)对应值,以调整后的第二施肥航迹b为准;
49、当6≤tzzspg<8时,表示液滴速度参数ydsd、液滴大小参数yddx和液滴覆盖度参数ydfg中任意一个数值异常,构成的液滴跃分布数据ydys在正常阈值范围ydyszc之外;
50、土壤调整植被指数savi、实时风速参数fscs和实时风向参数fxcs中任意一个数值异常,构成的环境影响指数hjyxs在正常阈值范围为hjyxszc之外,施肥无人机的航迹通过调整评价指数tzzs的评估阈值集合为tzzspg=(pg1、pg1…pgn)对应值,以调整后的第二施肥航迹b为准;
51、当8≤tzzspg≤10时,表示液滴速度参数ydsd、液滴大小参数yddx和液滴覆盖度参数ydfg中任意至少两个数值异常,构成的液滴跃分布数据ydys在正常阈值范围ydyszc之外;
52、土壤调整植被指数savi、实时风速参数fscs和实时风向参数fxcs中任意至少两个数值异常,构成的环境影响指数hjyxs在正常阈值范围为hjyxszc之外,施肥无人机的航迹通过调整评价指数tzzs的评估阈值集合为tzzspg=(pg1、pg1…pgn)对应值,以调整后的第二施肥航迹b为准。
53、一种系统,用于执行上述的基于机器视觉的施肥无人机航迹规划方法,包括:
54、预采集模块:用于采集航测生成航迹图中农作物植被的冠层分布数据gcfbs,并实时获取液体肥料在植被冠层上施肥后的液滴跃分布数据ydys以及周边的环境影响指数hjyxs;
55、预处理模块:用于接收冠层分布数据gcfbs并进行分析生成第一施肥航迹a,实时获取液滴跃分布数据ydys和环境影响指数hjyxs并进行分析生成用于对第一施肥航迹a进行修改的调整评价指数tzzs;
56、动态航迹生成模块:用于处理调整评价指数tzzs与对应评估阈值进行分析比对,以对第一施肥航迹a进行分级调整并形成动态的第二施肥航迹b。
57、与现有技术相比,本发明的有益效果是:采集航测生成航迹图中农作物植被的冠层分布数据gcfbs并进行分析生成第一施肥航迹a,实时获取液体肥料在植被冠层上施肥后的液滴跃分布数据ydys以及周边的环境影响指数hjyxs并进行分析生成用于对第一施肥航迹a进行修改的调整评价指数tzzs,根据调整评价指数tzzs与对应评估阈值进行分析比对,能够根据环境因素、农作物上肥料液的液滴跃分布情况对航迹图进行动态调整,使航迹图的调整程度进行分级设置,以提高航迹规划带来的施肥效果。
- 还没有人留言评论。精彩留言会获得点赞!