水下监测传感器系统及其工作方法与流程
本发明属于水下监测系统,尤其涉及一种水下监测传感器系统及其工作方法。
背景技术:
1、水下监测应用广泛,离线监测通常由固定安装在水下的监测设备完成,由于监测对象分散,一般需要布设很多监测设备。离线监测的工作方式通常是,监测设备自动定时测量并存储数据,而后,由rov/auv等定期潜入水下,与监测设备对接,收取本次对接与上一次对接之间监测设备的所有测量数据,还可启动监测设备立即测量,以得到最新的测量数据。
2、为满足监测的需要,当前水下定点离线监测设备通常由控制、测量、存储、通讯、电池、电源管理、耐压壳体等部分构成。水下环境条件特殊,维护困难,对监测设备可靠性要求很高,当前监测设备主要存在以下不足:
3、1、设备复杂:一个功能单元异常,将导致整台设备无法正常运行,监测设备由多个单元相互协同工作,功能单元种类多,显著影响了设备整体的可靠性;
4、2、设备供电困难:常见供电方式有一次性电池供电、外部有线供电、无线充电等。一次性电池供电模式,当电池耗尽后必须更换电池,或更换整个设备;外部有线供电模式,必须为每台设备铺设供电电缆,成本高,并且监测设备分布范围较广时,电缆布设难度大;当前还提出了一种水下无线充电的供电方法,由水下机器人携带无线充电装置航行到监测设备处,而后调整水下机器人位置,使得水下机器人保持悬停,并且其充电端与水下固定监测设备的受电端对正,将无线充电装置中的电能通过无线充电的方式充入监测设备,充电期间,需要始终保持两者对正状态,由于充电时间较长,并且存在洋流环境,水下机器人难以在洋流扰动下保持稳定的悬停,从而难以长时间保持对正状态,无线充电因此容易中断,影响充电的稳定性,进一步增加充电时间,为了缩短充电时间,需要增大充电功率,导致受电端和充电端体积增加,进而使两者对正的要求更为严苛,损耗增大,充电效率降低,水下机器人在充电期间不能离开,也就无法进行其他作业,使得水下机器人利用率降低,作业效率不佳;由于水下环境复杂、维护困难,这些方式的应用均存在较大的局限性;
5、3、数据接收困难:数据接收可以采用有线和无线两种方式,无线方式还包括水声通信、光通信和电磁通信等。有线通讯需要与监测设备湿连接,连接装置结构复杂,成本高,操作复杂,可靠性差;水声通信和电磁通信速率一般,接收较多数据时需要的时间长,需要较长时间与设备良好对接;光通信速率高,但要求水质良好,且对接准确,当本次对接与上一次对接之间的监测数据较多时,现有通讯方式数据接收困难;
6、4、设备升级困难:为了更好的完成监测工作,设备在使用期间可能需要进行升级,现有的方式,通常只能将监测设备整体回收后进行升级,由于监测设备固定在水下,并与被检测物的特定要求进行了连接,监测设备的拆除不仅需要在水下进行,而且还要断开多个与被检测物的连接,整体回收升级实现困难。
技术实现思路
1、针对相关技术中存在的不足之处,本发明提供了一种水下监测传感器系统及其工作方法,以解决当前水下的监测系统设备复杂、供电困难、数据接收困难以及设备升级困难的问题。
2、本发明提供水下监测传感器系统,包括测量装置、主机装置、传感器以及固定在水下的固定座;
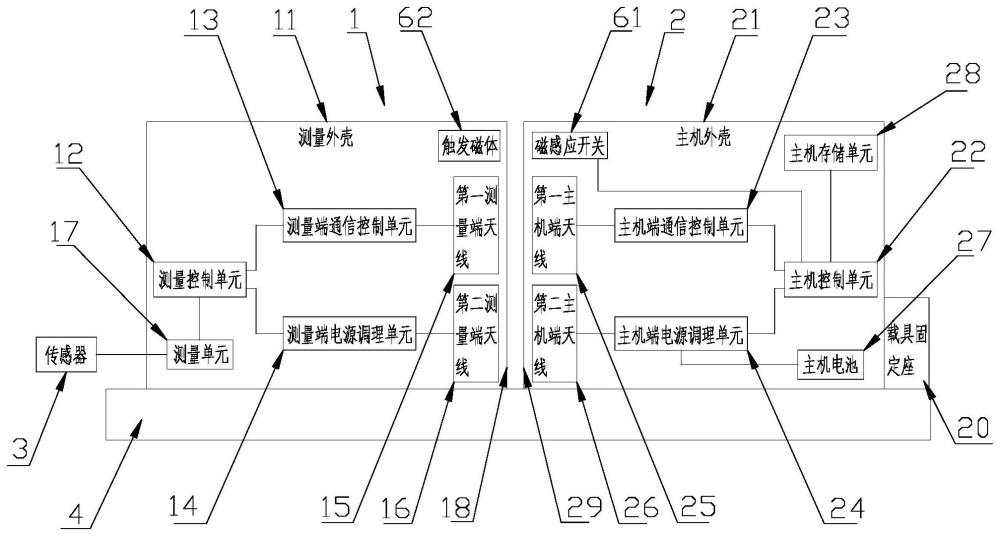
3、所述测量装置固定在所述固定座上,包括测量外壳,所述测量外壳内装设有测量控制单元、测量端通信控制单元、测量端电源调理单元、第一测量端天线、第二测量端天线以及测量单元;
4、所述测量单元、所述测量端通信控制单元和所述测量端电源调理单元均与所述测量控制单元电连接,所述测量端通信控制单元和所述测量端电源调理单元分别与所述第一测量端天线和所述第二测量端天线电连接,所述传感器与所述测量单元电连接,所述测量外壳的一端设为第一传输端,所述第一测量端天线和所述第二测量端天线均位于所述第一传输端;
5、所述主机装置叠设在所述固定座上,包括主机外壳,所述主机外壳内装设有主机控制单元、主机端通信控制单元、主机端电源调理单元、第一主机端天线、第二主机端天线、主机电池以及主机存储单元;
6、所述主机端通信控制单元、所述主机端电源调理单元和所述主机存储单元均与所述主机控制单元电连接,所述主机端通信控制单元和所述主机端电源调理单元分别与所述第一主机端天线和所述第二主机端天线电连接,所述主机电池与所述主机端电源调理单元电连接,所述主机外壳的一端设为第二传输端,所述第一主机端天线和所述第二主机端天线均位于所述第二传输端;
7、所述第一传输端与所述第二传输端相对设置,用以使所述第一测量端天线对准所述第一主机端天线,所述第二测量端天线对准所述第二主机端天线。
8、在其中一些实施例中,主机外壳上装设有载具固定座。
9、在其中一些实施例中,将固定座替换为对接装置,主机装置通过对接装置可拆卸连接在固定安装的测量装置上。
10、在其中一些实施例中,对接装置包括固定座和固定头,固定座装设在测量外壳上,固定头装设在主机外壳上,固定头与固定座可拆卸连接。
11、在其中一些实施例中,固定头通过设置的插头插接在固定座设置的插槽中。
12、在其中一些实施例中,固定头设置的磁铁吸附在固定座设置的铁板上。
13、在其中一些实施例中,第二传输端上装设有磁感应开关,磁感应开关与主机控制单元电连接,第一传输端上装设有触发磁体,触发磁体与磁感应开关相对齐。
14、本发明还提供一种水下监测传感器系统的使用方法,采用上述水下监测传感器系统,具体步骤如下:
15、s10:主机装置的主机控制单元控制主机端电源调理单元,主机端电源调理单元提取主机电池中的电能为主机装置供电,主机端电源调理单元将主机电池中的电能处理转换为模拟的输电信号,发送至第二主机端天线;
16、s20:第二主机端天线将输电信号发出,第二测量端天线接收输电信号;
17、s30:测量端电源调理单元将第二测量端天线接收到的输电信号处理转换为电能,并传输至测量控制单元,测量控制单元开始运行;
18、s40:主机装置的主机控制单元发出控制指令,控制指令经由主机端通信控制单元由数字信号调制转换为模拟的磁耦合通信信号,发送至第一主机端天线;
19、s60:第一主机端天线将控制指令的磁耦合通信信号发出,第一测量端天线接收控制指令的磁耦合通信信号;
20、s70:测量控制单元控制测量端通信控制单元将第一测量端天线接收到的磁耦合通信信号转换为数字信号的控制指令,并发送至测量控制单元;
21、s80:测量控制单元根据控制指令对测量单元进行控制,测量单元通过传感器进行数据采集;
22、s90:测量单元将通过传感器测量得到的模拟信号通过模数转换转为数字信号的测量数据,并将其发送至测量控制单元;
23、s100:测量控制单元控制测量端通信控制单元将测量数据由数字信号调制转换为模拟的磁耦合通信信号,并将其发送至第一测量端天线;
24、s110:第一测量端天线将测量数据的磁耦合通信信号发出,第一主机端天线接收测量数据的磁耦合通信信号;
25、s120:主机控制单元控制主机端通信控制单元将第一主机端天线接收到的磁耦合通信信号转换为数字信号的测量数据,并发送至主机控制单元;
26、s130:主机控制单元将测量数据发送至主机存储单元中存储。
27、在其中一些实施例中,步骤s130之后,进一步包括如下步骤:
28、s140:水下机器人携带替换主机装置到达测量装置所处位置,水下机器人的机械手将当前主机装置从固定座的主机机位上移开;
29、s150:水下机器人的机械手将携带的替换主机装置安放至固定座的主机机位上。
30、在其中一些实施例中,第二传输端和第一传输端分别装设有磁感应开关和触发磁体,磁感应开关与主机控制单元电连接,触发磁体与磁感应开关相对齐;
31、步骤s10之前,进一步包括步骤s0;
32、s0:触发磁体的磁场将磁感应开关接通,接通的磁感应开关启动主机控制单元。
33、基于上述技术方案,本发明实施例中将监测设备采用分体结构,分为连接了传感器的测量装置以及具有功能单元的主机装置,主机装置通过天线之间的无线充电对测量装置进行供电,主机装置通过天线之间的磁耦合通信向测量装置发送控制指令,测量装置在供电启动和收到控制指令后,按照控制指令利用传感器进行数据采集,采集到的测量数据通过天线之间的磁耦合通信上传至主机装置中的存储单元,在功能单元异常时,通过更换主机装置即可解决,测量装置和传感器保持固定在水下,从而保持与被检测物特定的连接要求;电池内置在主机装置中,通过无线充电的方式持续性的为测量装置供电,无需布设电缆,从而解决了因布设电缆导致的成本高、设备大范围分布时布设难度大的问题,主机装置与测量装置在固定座上保持固定对齐,容易维持无线充电和无线通讯稳定,水下机器人将当前主机装置取走,将替换主机装置安放,即可离开,不会长时间占用;测量数据存储在主机装置的存储单元中,由于主机装置可更换,可直接将存有测量数据的主机装置移至水上,进行近距离的有线数据上传,操作容易,数据上传速度快且无干扰,水下新更换的主机装置则保持监测设备的连续性运行;通过进行主机装置的更换,能够将水下的主机装置移至水上,并对其进行设备升级,操作容易,解决了当前水下的监测系统设备复杂、供电困难、数据接收困难以及设备升级困难的问题。
- 还没有人留言评论。精彩留言会获得点赞!