适用于光纤捷联惯导系统的陀螺实时动态温补方法与流程
本发明属于惯性导航,具体涉及一种适用于光纤捷联惯导系统的陀螺实时动态温补方法。
背景技术:
1、光纤陀螺作为光纤捷联惯导系统的核心器件,测量系统的角速度,但对于周围环境温度的变化十分敏感,温度变化会导致陀螺产生较大的偏置漂移。温度补偿是提高光纤陀螺输出精度必须进行的步骤,其直接影响最终系统的导航解算精度,是决定光纤惯导系统性能的补偿技术之一。传统方法是将光纤捷联惯导系统放置于温箱中,在多个温度点下对温箱进行保温后,按两位置、四位置标定方法计算各温度点下的陀螺偏置漂移,根据曲线拟合出偏置漂移与温度的变化关系进行补偿。该方法仅考虑温度,属静态模型温补方法,在不同的温度点采集陀螺数据完成温度与陀螺输出数据的曲线拟合进行温补,为保证温补精度,温度点间隔最大不超过20℃,对于-55℃~70℃的陀螺温补而言则至少需要7个温度点,而每个温度点需保温4h后再采集不小于30min的数据,耗费总时间超过30h,且在每个温度点时间内由于系统散热等问题,光纤陀螺输出随温度较快变化,因此得到的偏置漂移不是在同一温度点求解的,导致最后的补偿结果并不准确。同时,该方法涉及温度点多,且需要转位等操作,人工操作易出错。因此,在实际产品交付中,如何设计一种数据采集时间短、补偿模型可靠性高、易操作、软件存储空间占用率少的光纤捷联惯导系统陀螺实时动态温补方法,是惯性导航领域需解决的问题。
技术实现思路
1、本发明解决的技术问题:提供一种适用于光纤捷联惯导系统的陀螺实时动态温补方法,本发明目的在于设计一种数据采集时间短、补偿模型可靠性高、易操作、软件存储空间占用率少的光纤捷联惯导系统陀螺实时动态温补方法,提高光纤捷联惯导系统导航解算精度,解决光纤陀螺对周围环境温度变化敏感带来的温度漂移问题。
2、为达到上述目的,本发明采用的技术方案:
3、适用于光纤捷联惯导系统的陀螺实时动态温补方法,包括以下步骤:
4、步骤(1):设计温度漂移试验,使光纤捷联惯导系统中陀螺内部一直具有系统温度的梯度分布,该过程中采集光纤捷联惯导系统各轴陀螺输出及温度数据;
5、步骤(2):将陀螺输出及温度数据进行预处理,剔除由于电源扰动、温箱振动、测试误差等因素导致的陀螺数据和温度的异常输出;
6、步骤(3):数据预处理后,建立各轴实时陀螺偏置漂移随温度、温度梯度变化的动态温补模型,得到温补参数;
7、步骤(4):在光纤捷联惯导系统导航解算过程中对温度数据进行实时处理存储,存储温度数据计算实时动态温补模型的自变量信息;
8、步骤(5):按照步骤(4)将温度数据处理完成后,定时对动态温补模型的自变量信息更新计算,然后利用步骤(3)中得到的动态温补模型参数对光纤捷联惯导系统的各轴陀螺进行实时的温度补偿。
9、上述步骤(1)中,所述温度漂移试验测试过程如下:
10、1)将光纤捷联惯导系统通过安装夹具固定在水平的温控转台中,转动转台,使光纤捷联惯导系统按方位角45°±20°放置,连接测试电缆,测试设备,系统通电,按1hz采样频率采集-55℃~70℃温变过程中光纤捷联惯导系统实时输出的温度数据和陀螺数据;
11、2)设置温箱变温速率为0.5℃/min,使光纤捷联惯导系统由室温降温至-55℃,保温1h,再以0.5℃/min变温速度升温至70℃,保温1h,最后按照0.5℃/min变温速度降温至25℃,保温1h,系统断电。
12、上述步骤(2)中数据预处理的具体过程如下:
13、1)计算各轴陀螺的标准偏差σk及均值根据三西格玛准则去除各轴陀螺异常点数据,既满足下式时,则认为此时刻三轴陀螺输出为含有粗大误差值的异常点,筛选出来由前一帧数据替代;
14、
15、其中:k表示陀螺不同的轴向,即x轴、y轴、z轴;表示光纤捷联惯导系统的k轴陀螺输出;i系为惯性坐标系;b系为机体坐标系。
16、2)由于温箱变温速率为0.5℃/min,前后两帧采集的温度值不会有太大偏差,按下式判断筛选温度异常点,由前一帧数据替代;
17、|ti-ti-1|>1且|ti-ti+1|>1
18、其中:ti为当前时刻温度;ti-1为前一时刻温度;ti+1为后一时刻温度。
19、上述步骤(3)中,数据预处理后,以各轴陀螺的输出均值为基准,计算全温状态下陀螺各个数据点偏置漂移dk0_n,同时对各轴温度数据处理得到实时温度t_kn和温度梯度dtkn,最后建立以t_kn和dtkn为自变量,dk0_n为因变量的二次多项式拟合动态温补模型;具体过程如下:
20、1)由于在启动段初期,光纤捷联惯导系统内部电路发热陀螺温度变化较快,但该变化并未完全形成陀螺内部光路温度梯度分布和电路整体实际温升,不具备补偿的实际意义,因此将前10s数据整体剔除;
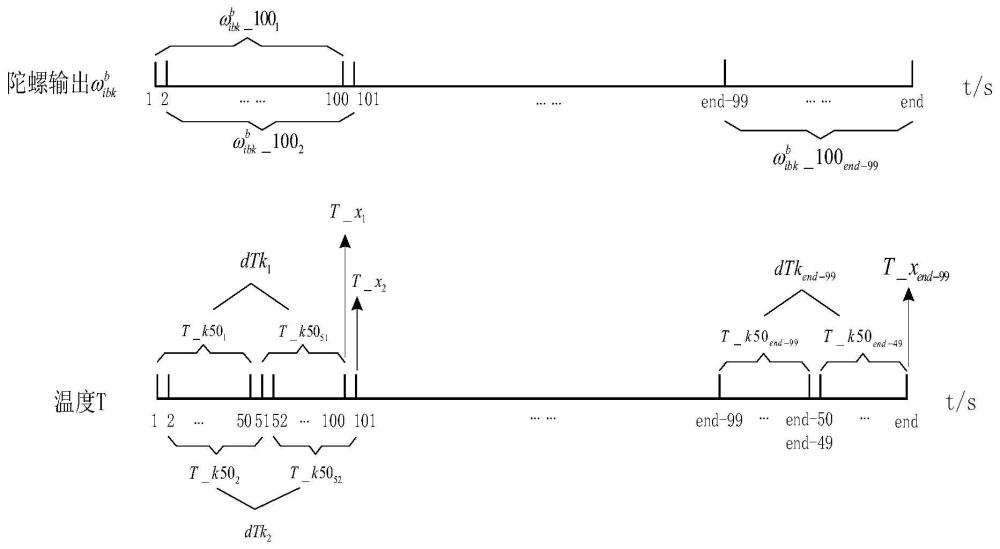
21、2)将经过步骤(2)预处理后的各轴陀螺数据进行100s平滑,得到新的数列其中n=1、2、3、4、5……;
22、3)以各轴陀螺的输出均值为基准,计算全温状态下陀螺各个数据点偏置漂移
23、4)取100s后的各轴温度数据t_kn,其中k=x、y、z,n=1、2、3、4、5……,既x轴陀螺100s、101s、102s时的温度数据分别为t_x1、t_x2、t_x3,以此类推;
24、5)对各轴温度数据进行50s平滑,得到新的数列t_k50n,再以此求得温度梯度dtkn=t_k5050+n-t_k50n;
25、6)将陀螺偏置漂移dk0_n和温度数据t_kn、温度梯度dtkn进行拟合,以t_kn和dtkn作为自变量,dk0_n作为因变量,建立二次多项式拟合的动态温补模型:
26、dk0_n=h1k·t_k+h2k·t_k2+h3k·dtk+h4k·dtk2
27、矩阵形式为:
28、
29、该式可化简为:
30、zk=akxk
31、其中:
32、根据最小二乘原理,则待求量的各轴陀螺温补模型参数h1k、h2k、h3k和h4k为:
33、xk=[aktak]-1aktzk。
34、其中:k表示陀螺不同的轴向,即x轴、y轴、z轴;t_kn表示第n个时间点时k轴陀螺温度数据;dk0_n表示第n个时间点时k轴陀螺偏置漂移;dtkn表示第n个时间点时k轴陀螺温度梯度;akt表示ak的转置。
35、上述步骤(4)中,将实时温度数据每隔1s计算平均温度数据并进行存储,共存储前100s温度数据即共100个数据点,用于温补模型的自变量信息计算,每1s可更新一次自变量信息,以系统解算周期10ms为例,具体方法如下:
36、
37、
38、
39、其中:tk_msn1~tk_msn100为第n个1s内每隔10ms光纤捷联惯导系统实时的k轴陀螺温度数据;tk_1sn为第n个1s的k轴陀螺温度数据均值,需存储于数据存储区中;tk_50s1为存储的前100s温度数据中第1s~50s的k轴陀螺温度数据均值;tk_50s1为存储的前100s温度数据中第51s~100s的k轴陀螺温度数据均值;k=x、y、z;n=1、2、3、4、5…100。
40、上述步骤(5)中,具体过程如下:按照步骤(4)将温度数据处理完成后,每1s进行一次动态温补模型的自变量信息t_k和dtk更新计算,然后利用步骤(3)得到的动态温补模型参数h1k、h2k、h3k和h4k,对光纤捷联惯导系统的各轴陀螺进行实时的温度补偿;
41、动态温补模型的自变量信息计算如下:
42、t_k=tk_1s100
43、dtk=tk_50s2-tk_50s1
44、动态温补模型估算光纤陀螺常值漂移如下:
45、dk0=h1k·t_k+h2k·t_k2+h3k·dtk+h4k·dtk2
46、陀螺常值漂移补偿方法如下:
47、
48、其中:表示光纤捷联导航系统实时补偿后的各轴陀螺数据输出;表示光纤捷联导航系统各轴陀螺数据实时输出;dk0表示动态温补模型估算的各轴陀螺实时常值漂移。
49、本发明与现有技术相比的优点:
50、1、本方案针对光纤捷联惯导系统在工作过程中存在陀螺和温度数据异常输出影响动态温补模型建模的情况,设计了一种通过三西格玛原则判断陀螺异常输出,设置温度变化阈值门限判断温度异常输出的数据预处理方法,提高温补精度;
51、2、本方案中在连续变温环境下,以温度t_kn和温度梯度dtkn为自变量,陀螺偏置漂移dk0_n为因变量的二次多项式拟合动态温补模型,通过最小二乘计算得到温补模型补偿参数,该方法应用了动态温度信息,并进行二次项拟合,可进一步提高温补精度;
52、3、本方案设计了一种光纤捷联惯导系统陀螺实时动态温补过程中温度数据处理及存储方法,可将实时温补过程中计算机板数据存储区占用率大幅度降低(例:10ms采样周期降低100倍),同时保证实时动态温补过程计算精度;
53、4、本方案实现了一种适用于光纤捷联惯导系统陀螺实时动态温补方法,该方法温度适应性宽,在-55℃~70℃连续变温环境下,整个温补测试过程耗费总时间小于10h,大幅度降低温补建模时间;
54、5、本方案针对系统连续变温试验设计了单位置(水平放置、方位角为45°±20°)采样,并以各轴陀螺输出均值为基准值的方法,在完成实时陀螺偏置漂移计算的同时还可避免陀螺角速度在0°附近的死区效应影响,无需按照传统方法进行两位置、四位置标定实时计算陀螺偏置漂移,极大降低了传统方法对温控转台精度要求;
55、6、本方案是针对光纤捷联惯导系统的一种数据采集时间短、补偿模型可靠性高、易操作、软件存储空间占用率少的光纤捷联惯导系统陀螺实时动态温补方法,提高光纤捷联惯导系统导航解算精度,解决光纤陀螺对周围环境温度变化敏感带来的温度漂移问题。
- 还没有人留言评论。精彩留言会获得点赞!