一种室外多角度偏振光谱特征检测装置及方法
:本发明涉及近地面伪装目标的光学特性检测领域,尤其是涉及一种室外多角偏振光谱特征检测装置及方法,特别适用于撒布地雷。
背景技术
0、
背景技术:
1、偏振光谱技术是近几年迅速发展的一种新型的检测技术。偏振是光波的基本属性之一,物体在反射、散射入射光的过程中,会产生与其自身内在属性及表面状态相关的偏振特征信息,并且物体表面的偏振特征会随着探测条件如观测角度、波长的不同而变化;光谱成像技术则是能够同时获取图像的2维空间信息和1维光谱信息,具有图谱合一和光谱连续的特点。因此,通过对近地面特定伪装目标的多角度、多光谱偏振特征采集,能够针对性建立特定目标(典型撒布地雷)的偏振特征数据库,通过对照各个角度、各个光谱波段的被测目标同周边常见背景的偏振特征差异,力求揭示特定伪装目标(撒布地雷)的最佳观测方位及偏振敏感波段,进而借助偏振特征实现低照度复杂环境下对近地伪装目标的识别检测。
2、目前已有的多角度双向反射测量装置大部分都基于实验室室内环境下针对某种特定材料的小范围测量,实验室标定结果与实际室外测量结果仍存在不小的模型误差。
3、专利文献cn111948148a所公开的一种多光场多角度多维度光谱偏振特性测量装置是以半球形滑动支架作为底座而设计的,其结构决定该装置需要较大面积的水平地面作为开展前提,不宜做成大型装置,所以仅适用于实验室室内对特定材料样品切片进行观测实验,难以实现室外情况对特定实际目标进行大范围的空间观测实验。从方法实现上,该方法需要在相应波段的光源照射下实现对特定光谱波段的偏振特征采集,距离室外日光、夜间环境光下实现多波段的偏振特征采集还存在一定的困难,在偏振图像采集方面,需要采集偏振角为(0°、45°、90°、135°)4张图片。
技术实现思路
0、
技术实现要素:
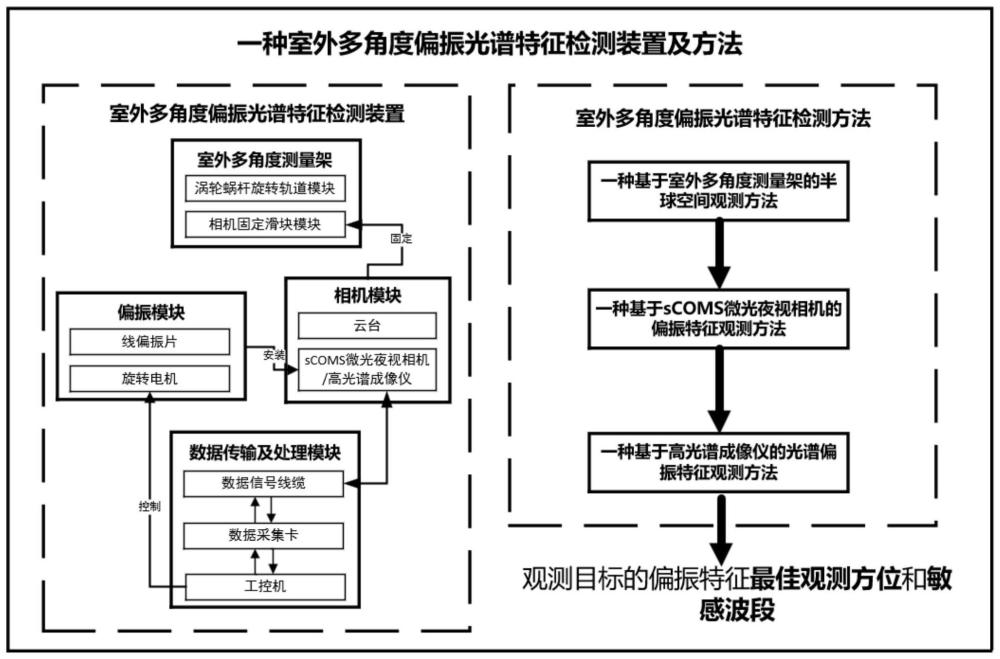
1、针对现有尚无专用于近地面目标的室外多角度偏振观测装置问题,本发明提供室外多角偏振光谱特征检测装置及方法,装置以室外多角度测量架为主体。并在此基础上提出一种基于室外多角度测量架的地雷目标半球空间观测方法,方法能够实现探测器在半径2m的半球球面上灵活运动,并在任意一个角度实现探测器的固定。并结合夜视技术,本发明提出一种基于scoms微光夜视相机的地雷目标多角度偏振特性观测方法,方法通过对撒布地雷的多个观测方向上的偏振特征提取,寻求撒布地雷与周围典型环境偏振特征差异峰值时的观测方位,即为最佳观测方位。结合光谱成像技术,通过在最佳观测方位上对待测目标的连续光谱偏振特征提取,求得对于特定待测目标的最佳偏振特征敏感波段,使得该波段下,伪装目标同周边环境偏振特征值达到最大。
2、为达到上述目的,本发明采用下属技术方案:
3、一种室外多角度的偏振光谱特征检测装置,装置以室外多角度测量架为主体,搭载偏振模块、相机模块、通信及数据处理模块;其特点在于:
4、(ⅰ)所述室外多角度测量架,由涡轮蜗杆旋转轨道模块和相机固定滑块模块构成,所述涡轮蜗杆旋转轨道模块由手轮、键ⅰ、阻尼端盖、蜗轮蜗杆减速器、键ⅱ、轴ⅰ、键ⅲ、梅花弹性联轴器、键ⅳ、立式轴承座、轴ⅱ、对顶螺母、半圆轨道架、底座组成;所述手轮通过键ⅰ与涡轮蜗杆减速器连接;所述阻尼端盖通过螺钉与蜗轮蜗杆减速器连接;所述轴ⅰ通过键ⅱ与蜗轮蜗杆减速器输出端连接;所述弹性联轴器通过键ⅲ、键ⅳ连接轴ⅰ和轴ⅱ,所述立式轴承座穿过轴ⅱ与底座固定;所述半圆轨道架通过对顶螺母与轴ⅱ固定;所述相机固定滑块模块由锁紧卡扣、滑块、相机固定板、螺栓螺母、螺钉组成;所述锁紧卡扣安装于半圆轨道架上与滑块通过螺钉固定;所述相机固定板通过螺栓螺母与滑块连接;
5、(ⅱ)所述相机模块由相机和云台组成,相机可根据测量要求及测量环境选择高光谱成像仪或者scmos微光夜视相机安装于云台之上;所述云台安装于相机固定板上;
6、(ⅲ)所述偏振模块由线偏振片和旋转电机组成,所述线偏振片与旋转电机固定,所述旋转电机与相机通过卡扣连接;
7、(ⅳ)所述通信及数据处理模块由工控机、数据采集卡、数据信号线缆组成,所述数据采集卡通过pci-e接口与工控机连接,所述数据信号线缆连接数据采集卡和相机模块。
8、一种基于室外多角度测量架的半球空间观测方法,根据装置结构所述,室外多角度测量架可分为涡轮蜗杆旋转轨道模块和相机固定滑块模块构成;两个模块各自可提供一个空间旋转自由度,实现在撒布地雷目标的半球空间内任意角度方位固定观测,双旋转自由度具体实现过程如下:
9、(a)控制蜗轮蜗杆旋转轨道模块;通过手轮输入扭矩,传递给蜗轮蜗杆减速器,轴蜗轮蜗杆机构通过减速比放大输入扭矩传递给轴1,轴1与梅花联轴器通过键连接,进而将扭矩传递给联轴器的输出端,梅花联轴器的输出端与轴2通过键连接,经立式轴承座的定位,将扭矩传递给t型弯头,t型弯头通过对顶螺母与轴2上的阶梯预紧力压紧,输出扭矩实现半圆轨道绕轴2旋转中心的1个旋转自由度。在自锁涡轮蜗杆机构的前提下,为保证结构安全性,机构设计了阻尼机构,通过螺母预警减速器端盖而实现对输入轴的锁紧,保证机构不会因半圆轨道架倾斜而产生的扭矩反转;
10、(b)控制相机固定滑块模块;锁紧卡扣通过下表面铣出仿形平面与半圆轨道架贴合实现相机绕半圆轨道的滑动,从而提供与步骤(a)所述旋转自由度1正交的旋转自由度2。通过对滑块上的螺钉施加预紧力可实现观测方位的锁紧固定;
11、在室外测量过程中,旋转手轮控制蜗轮蜗杆旋转轨道模块使半圆轨道架绕旋转中心旋转同时配合相机滑块模块沿半圆轨道架中心轴滑动即可实现探测器双旋转自由度在半径为2m的半球平面内多角度固定测量。
12、一种基于scoms微光夜视相机的偏振特性观测方法,其特征在于,利用室外多角度测量架对被测目标进行多角度的偏振特征观测,力求取得被测目标的最佳观测方位;观测方法步骤大致如下:
13、(ⅰ)以撒布地雷目标作为半球球心搭建室外多角度测量架,安装方向要求月光与目标连线所在的铅垂平面与半圆轨道架竖直角度所在平面正交,以减少室外多角度架对于光照遮挡的影响,记录当前主要光源(月光)所在入射天顶角大小;
14、(ⅱ)将scoms微光夜视相机同云台固定,云台与相机固定板之间通过m6螺纹连接固定,将数据采集卡插入工控机主板的pci-e插槽,数据信号线缆一端与数据采集卡的camera link hs接口及电机驱动电路接口相连,另一端与scoms微光夜视相机接口及偏振模块连接,进而实现数据传输;
15、(ⅲ)给相机模块和工控机上电,启动工控机,打开图像采集软件,调用窗口实时显示成像图像,调整相机光圈、曝光、积分时间等参数至撒布地雷目标及周围物地背景能够清晰成像;
16、(ⅳ)将偏振模块同scoms微光夜视相机镜头连接,通过旋转手轮控制蜗轮蜗杆旋转轨道模块使半圆轨道架绕旋转中心旋转同时配合相机滑块模块沿半圆轨道架中心轴滑动,使相机模块固定在被测方位,工控机发出采集指令,旋转电机带动线偏振片旋转,根据fessenkov方法,线偏振片依次旋转至方向角为0°、60°、120°方位,保存3个偏振方向角的光强信息,存入数据库;
17、(ⅴ)调整观测方位,重复步骤(4)所述实验;要求观测天顶角范围为-75°~+75°,天顶角间隔15°测量一次;观测方位角范围为0°~180°,方位角间隔30°观测一次;每个观测方位上要求保存4个偏振方向上的光强信息,存入数据库;
18、(ⅵ)根据fessenkov方法,对各个观测方向上的3个偏振光强信息进行解析,得到偏振度(dolp)和偏振角(aolp)信息;提取撒布地雷目标和周围背景的偏振信息,对照各个方向上撒布地雷的偏振信息,力求取得撒布地雷的最佳观测方位(观测天顶角和观测方位角)。
19、一种基于高光谱成像仪的光谱偏振特性观测方法,其特征在于,对被测目标进行多个光谱波段的偏振特征观测,力求取得被观测目标偏振特征的敏感光谱波段,方法步骤如下:
20、(1)在光照充足的条件下(晴天中午),相机模块选用高光谱成像仪,安装在室外多角度测量架上,调整室外多角度测量架至最佳观测方位上;通过数据信号线缆连接数据采集卡和高光谱成像仪;
21、(2)对相机模块和工控机上电,启动工控机,打开图像采集软件,调用窗口实时显示成像图像,调整高光谱成像仪的镜头焦距、光圈大小至被测目标及周围环境能够清晰成像,将偏振模块安装至高光谱成像仪镜头前,将线偏振片旋转至方向角为0°方位;
22、(3)在最佳观测方位对撒布地雷进行连续光谱的偏振特征测量,光谱范围为420-750nm,扫描精度为1nm,记录并存储各个波段光强信息;
23、(4)通过旋转电机分别控制线偏振片旋转至60°、120°,重复步骤3所述,分别采集并存储420-750nm内各个波段的光强信息;
24、(5)根据fessenkov方法,对各个波段上的3个光强信息进行解析,得到各个波段的偏振度(dolp)和偏振角(aolp)指标;提取撒布地雷目标和周围背景的偏振信息,并通过对比不同波长条件下撒布地雷和背景之间的偏振特征差异,以求找到最佳观测光谱波段。
25、(6)相比于专利文献cn111948148a,本技术以室外多角度测量架为主体,同时室外多角度测量架又由涡轮蜗杆旋转轨道模块和相机固定滑块模块构成,各模块具有可拆卸性,便于室外的运输与二次组装,实现了对室外环境下,对特定被测目标2m为半径的空间目标内的空间偏振特性及光谱特性测量。本方法不需要相应波段的光源照明,即可实现室外正常光照环境下对特定实际目标的光谱偏振测量,且在目标偏振特性观测方面。装置通过模块化实现,通过更换特定的相机模块,结合高光谱相机模块可以实现在正常光照环境下(日光)对特定目标的空间连续光谱偏振特性的观测,得出特定目标的最佳观测方位及敏感光谱波段;结合微光夜视相机模块可以实现在夜间低照度下,对特定目标空间偏振特性分布的单独测量,得出目标的最佳偏振观测方位;本发明通过采集偏振角为(0°、60°、120°)3张图像,根据fessenkov方法计算偏振度(dolp)和偏振角(aolp)指标,进而判断目标的最佳偏振观测方位,从采样次数上要优于专利文献cn111948148a;从实现目标上来讲,本技术所提出的方法是为了更好的实现对特定目标的检测,所以在最佳观测角度方向上的观测实验,本方法更加侧重于针对具体目标与特定地面背景的偏振度(dolp)和偏振角(aolp)差异(差值)来实现确定针对具体目标的最佳观测角度。
- 还没有人留言评论。精彩留言会获得点赞!