一种基于转速传感器结合多信号分析的旋转方向识别方法与流程
本技术涉及传感器,尤其是一种基于转速传感器结合多信号分析的旋转方向识别方法。
背景技术:
1、随着汽车电子技术的发展,越来越多的智能传感器出现,这类智能传感器简化了产品整体结构的设计复杂度,但是对信号的采集处理功能提出了更多的要求。
2、其中,转速传感器是一类常用的传感器类型,新型的智能转速传感器不仅具备转速采集功能,还支持旋转方向的判断,这类智能转速传感器一般包括两个感应探头,两个感应探头1和2都安装在旋转组件3的径向方向上,一般在安装时,请参考图1所示的示意图,感应探头1正对旋转组件3的其中一个齿安装,感应探头2不正对齿安装而是与齿的正对角度存在一个齿距偏差。则在图1的这种安装结构中,当旋转组件3顺时针正向旋转时,感应探头2的pwm信号(pwm2)就会比感应探头1的pwm信号(pwm1)提前相位θ;当旋转组件3逆时针反向旋转时,感应探头1的pwm信号(pwm1)就会比感应探头2的pwm信号(pwm2)提前相位θ。需要说明的是,一般以pwm信号的一个周期对应360°相位,因此图1中的相位θ表示的是相应时长对应的相位。常见的一般在安装时令两个感应探头相对齿的位置相差1/4个齿距,使得两个霍尔探头1和2产生的pwm信号就会相差1/4个周期,也即使得相位θ为90°。因此通过检测两个霍尔探头的pwm信号,并判断两路pwm信号的相位关系即能确定旋转组件3的旋转方向。
3、为了对上述智能转速传感器进行采集处理以识别旋转方向,目前常见的有三种实现方式:
4、(1)通过一个普通的mcu的pwm采集模块进行信号的采集,然后把相位的识别功能通过单独的硬件模块进行识别。这种方法需要增加非常复杂的硬件设计电路,不仅仅增加成本而且针对不同的智能转速传感器还需要大量的工作进行电路的重新调整设计,使用不便。
5、(2)同时利用两个普通的mcu自带的pwm采集模块,分别采集两个霍尔探头的两路pwm波,然后进行相位的判断以确定旋转方向。这种设计方案相比于(1)在硬件设计上得到了简化,依赖于mcu所带有的pwm采集模块以及对应的计数器来进行信号的判断。通过mcu上的两个pwm捕捉通道采集信号,然后从软件的层面借助于定时器的时间戳进行相位的判断。但是该方案在实施上,完整捕捉了两路pwm波,中间会产生大量的信号触发中断,这对整个系统的可靠性、实时性以及算力都带来了一定的负担。此外,不同mcu自带的pwm采集模块的方案也有很大的差异,如果两路pwm通道没有相同的定时器,在软件的实现上会更加复杂。而mcu上的pwm通道数目通常也十分有限,这样会较大的增加mcu相应的资源占用。
6、(3)利用带有相位处理硬件模块的更高端的mcu来进行相位判断和旋转方向的识别,这是目前信号识别最为精准的方案,但是使用高端mcu导致该方法难以被广泛使用,而且,不同厂家的mcu所需要的软件并不通用,在产品改正或者升级的过程中难免会带来新的软件开发工作。
技术实现思路
1、本技术针对上述问题及技术需求,提出了一种基于转速传感器结合多信号分析的旋转方向识别方法,本技术的技术方案如下:
2、一种基于转速传感器结合多信号分析的旋转方向识别方法,该旋转方向识别方法包括:
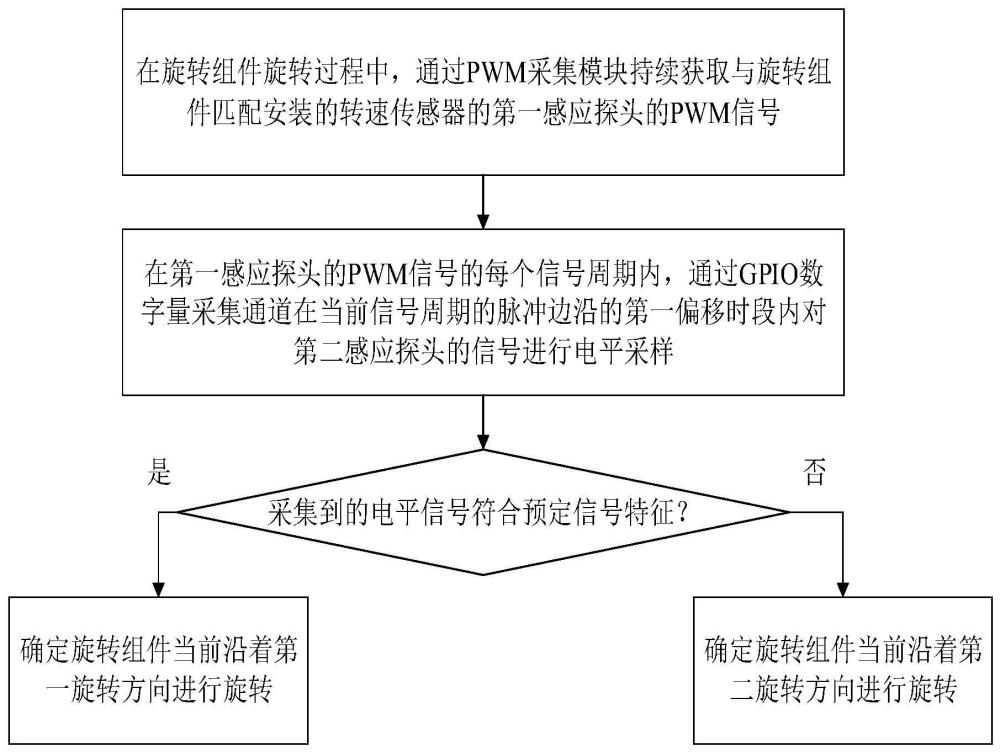
3、在旋转组件旋转过程中,通过pwm采集模块持续获取与旋转组件匹配安装的转速传感器的第一感应探头的pwm信号;
4、在第一感应探头的pwm信号的每个信号周期内,通过gpio数字量采集通道在当前信号周期的脉冲边沿的第一偏移时段内对第二感应探头的信号进行电平采样,第一偏移时段与第一旋转方向的标准偏移相位相匹配,第一旋转方向的标准偏移相位是旋转组件沿着第一旋转方向旋转时第二感应探头的pwm信号相对于第一感应探头的pwm信号的滞后相位;
5、当通过gpio数字量采集通道在当前信号周期的脉冲边沿的第一偏移时段内采集到的电平信号符合预定信号特征时,确定旋转组件当前沿着第一旋转方向进行旋转,否则确定旋转组件当前沿着第二旋转方向进行旋转;其中,第一旋转方向为正转方向或反转方向,第二旋转方向与第一旋转方向相反。
6、其进一步的技术方案为,第一偏移时段覆盖从当前信号周期的脉冲边沿开始、也与当前信号周期的脉冲边沿间隔时长为范围内的时段;其中,t是第一感应探头的pwm信号的单个周期时长,是相位偏移误差。
7、其进一步的技术方案为,检测采集到的电平信号是否符合预定信号特征包括:
8、当通过gpio数字量采集通道在当前信号周期的上升沿的第一偏移时段内采集到的电平信号从低电平切换到高电平时,确定检测采集到的电平信号是否符合预定信号特征;
9、或者,
10、当通过gpio数字量采集通道在当前信号周期的下降沿的第一偏移时段内采集到的电平信号从高电平切换到低电平时,确定检测采集到的电平信号是否符合预定信号特征。
11、其进一步的技术方案为,旋转方向识别方法还包括:
12、当通过gpio数字量采集通道在当前信号周期的脉冲边沿的第一偏移时段内采集到的电平信号符合预定信号特征时,确定当前信号周期的候选识别结果为第一旋转方向,否则确定当前信号周期的候选识别结果为第二旋转方向;
13、在第一感应探头的pwm信号的连续多个信号周期内进行检测并得到候选识别结果,根据连续k个信号周期的候选识别结果确定旋转组件当前沿着正转方向或反转方向进行旋转,其中,k为整数参数且k≥2。
14、其进一步的技术方案为,根据连续多个信号周期的候选识别结果确定旋转组件当前沿着正转方向或反转方向进行旋转包括:
15、当连续k个信号周期的候选识别结果都指示正转方向时,确定旋转组件当前沿着正转方向进行旋转;
16、当连续k个信号周期的候选识别结果都指示反转方向时,确定旋转组件当前沿着反转方向进行旋转;
17、当连续k个信号周期的候选识别结果中部分指示正转方向、部分指示反转方向时,重新执行在第一感应探头的pwm信号的连续多个信号周期内进行检测并得到候选识别结果的步骤。
18、其进一步的技术方案为,在第一感应探头的pwm信号的连续多个信号周期内进行检测包括:
19、对于任意连续的两个信号周期,在其中一个信号周期内以第一旋转方向为正转方向进行检测、在另一个信号周期内以第一旋转方向为反转方向进行检测。
20、其进一步的技术方案为,旋转方向识别方法包括:
21、当确定当前处于第一工作模式时,在每个信号周期内都以相同的第一旋转方向进行检测;
22、当确定当前处于第二工作模式时,在相邻的信号周期内分别以不同的第一旋转方向进行检测。
23、其进一步的技术方案为,旋转方向识别方法还包括:
24、当检测到进入预定工况时,确定采用第二工作模式,否则确定采用第一工作模式。
25、其进一步的技术方案为,旋转方向识别方法还包括:
26、当通过转速传感器的第一感应探头的pwm信号检测到旋转组件的转速小于转速阈值时确定进入预定工况。
27、其进一步的技术方案为,旋转方向识别方法还包括:
28、接收模式配置参数,根据模式配置参数确定当前处于第一工作模式或处于第二工作模式。
29、本技术的有益技术效果是:
30、本技术公开了一种基于转速传感器结合多信号分析的旋转方向识别方法,该方法通过采集一路pwm信号,再结合gpio的数字量采集的触发方式结合相应的识别方法即可实现对旋转方向的识别,只需占用mcu中的一个pwm采集模块,结合数量更多、更为常见的gpio数字量采集通道即可实现,无需借用外部硬件电路也无需占用两个pwm采集模块,更无需使用高端mcu产品,可以在准确识别旋转方向的基础上,降低对硬件资源的占用。
31、该方法提供两种不同的工作模式,可以满足不同应用场景下对算力和可靠性的要求,并在实际使用时可以人工会自动识别进行灵活切换,适应不同场景的应用需要。
32、该方法的gpio的数字量采集的触发方式采用定时器的服务来实现,这部分功能可以借用于系统中的rtos的服务来实现,从而将信号采集的中断频次降低为双路pwm采集的一半,从来带来了系统更高的可靠性与实时性。
- 还没有人留言评论。精彩留言会获得点赞!