一种分裂波束数据处理方法、装置、电子设备和介质
本技术涉及海洋地球物理勘探,具体涉及一种分裂波束数据处理方法、装置、电子设备和介质。
背景技术:
1、水下目标的回声信号特性研究具有非常重要的理论价值和广泛的实际应用背景,国内外都围绕这个问题进行了广泛而深入的研究。从上世纪初,人们就开始对水下目标回声特性进行研究,随着计算机技术的发展及电子仪器性能的提高,水声学探测目前已成为海洋资源研究的重要手段之一。分裂波束声学探测系统是海洋生物研究不可或缺的仪器设备,将它安装在现代大型综合科考船的船底,在航行中可以不受海况影响对水体中的反射物进行探测,不仅可以对反射物进行定位,而且可以分析其反射强度。
2、分裂波束声学探测系统通常具有很宽的工作频带,具有声学多普勒流速剖面仪功能的系统,它主要用于探测鱼类、沉水植物、海底可燃冰、冷泉、热液等形成的羽状流、气泡团等的探测。
3、分裂波束声学探测系统运用4个象限的换能器,将电信号转换成声脉冲并发射到水中,声波在水中传播过程中遇到障碍物时,部分反向散射至换能器。每个象限换能器可独立接收声波,如果信号水平超过用户选择的阈值,将被换能器接收并生成回波图。根据声波发射与收到回波的时间间隔和声波在水中的传播速度,利用分裂波束技术可测得目标所处的位置;现代分裂波束声学探测系统已经由过去单一的探鱼发展到全面水体探测,同时作为地球探测类仪器,极限距离分辨率和改进的目标特征使其具有广泛的海洋学应用,尤其可与多波束一起工作从而对水层特性分析。与海洋地震勘探数据类似,所记录的采集数据往往夹杂着大量噪音,目标层或目标体难以准确识别。在盐水中,吸收率随频率而大幅增加。 对于最大观察范围,通常应选择低工作频率、大换能器和最大发射功率,与观察范围和工作频率有关的关键事实是:当工作频率降低时,观察范围会增加,当工作频率增加时,分辨率会增加,而对于深水中工作,则需要低工作频率,分辨率会降低,比如冷泉、内波等追踪一般采用38 khz的低频。因此,需要一种适用于分裂波束的数据处理方法,以从信号的瞬时属性中获取更多的有用信息,提高深水低频信号的分辨率。
技术实现思路
1、本发明的目的在于提供一种分裂波束数据处理方法、装置、电子设备和介质,能够在保留原信号有效分量的同时,最大程度地压制各个频带的噪音,尤其是高频噪音。
2、第一方面,本技术提供了一种分裂波束数据处理方法,包括:
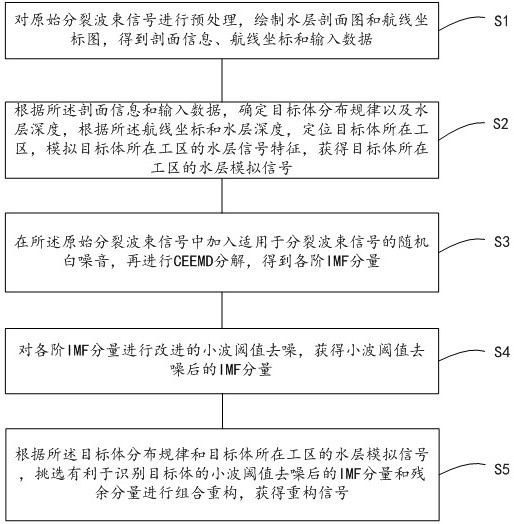
3、步骤s1:对原始分裂波束信号进行预处理,绘制水层剖面图和航线坐标图,得到剖面信息、航线坐标和输入数据;
4、步骤s2:根据所述剖面信息和输入数据,确定目标体分布规律以及水层深度,根据所述航线坐标和水层深度,定位目标体所在工区,模拟目标体所在工区的水层信号特征,获得目标体所在工区的水层模拟信号;
5、步骤s3:在所述原始分裂波束信号中加入适用于分裂波束信号的随机白噪音,再进行ceemd分解,得到各阶imf分量;
6、步骤s4:对各阶imf分量进行改进的小波阈值去噪,获得小波阈值去噪后的imf分量;
7、步骤s5:根据所述目标体分布规律和目标体所在工区的水层模拟信号,挑选有利于识别目标体的小波阈值去噪后的imf分量和残余分量进行组合重构,获得重构信号。
8、进一步地,当采集方式为分段采集时,读取各采集段内分裂波束声学探测系统不同频率通道的分段原始分裂波束信号,根据坐标对所述分段原始分裂波束信号进行拼接处理,获得原始分裂波束信号,再进行预处理。
9、进一步地,所述步骤s3包括:
10、步骤s3.1:在原始分裂波束信号中添加正随机白噪音和负随机白噪音,得到新信号,所述新信号为:
11、其中,为第次添加的随机白噪音,为随机白噪音的幅度,为时间,的取值决定着随机白噪音的正负性,,为正负白噪音的初始化总体平均次数;
12、步骤s3.2:将所述新信号作为输入数据,对所述输入数据进行emd分解,输出和残差,其中,为本征模态函数;所述步骤s3.2包括:
13、步骤s3.2.1:确定所述输入数据的单调区间、所有局部极大值点和极小值点;利用三次样条曲线连接所有极大值点,形成上包络线,连接所有极小值点形成下包络线;计算上下包络线的均值;
14、计算所述输入数据与上下包络线的均值的差作为中间信号,计算公式如下:
15、其中,表示输入数据,表示上下包络线的均值,表示中间信号;
16、步骤s3.2.2:对所述中间信号进行imf条件判定,得到差值信号,具体为:
17、判断所述中间信号是否满足imf的两个定义条件:一是在完整数据中,极值点和过零点的数目仅存在相等或两者差值为1两种情况;二是对于任何点,用局部极大值确定的包络和用局部极小值确定的包络计算平均值并让其等于零;
18、如果满足,则将所述中间信号作为本征模态函数,记为;
19、如果不满足,则将所述中间信号作为输入数据,重复步骤s3.2,重新确定单调区间,得到新的中间信号,并判断新的中间信号是否满足imf的两个定义条件,持续进行循环迭代计算,直至得到的中间信号满足imf的两个定义条件,此时的中间信号作为本征模态函数,记为;
20、步骤s3.2.3:残差判定,具体为:
21、将所述本征模态函数从所述输入数据中分离出来,得到一个具有单调性质的差值信号,计算公式如下:
22、其中,表示差值信号,表示输入数据,表示本征模态函数;
23、如果所述差值信号不是单调函数,则将所述差值信号作为输入数据,重复步骤s3.2.1-步骤s3.2.3,累计进行循环迭代,直至差值信号为单调函数;
24、步骤s3.3:重复循环步骤s3.1—步骤s3.2,直到达到正负白噪音的初始化总体平均次数的2倍,对所述本征模态函数进行平均,得到各阶imf分量,其中,为第阶imf分量,为本征模态函数,为添加随机白噪音的次数,为时间,为正负白噪音的初始化总体平均次数;
25、残差信号的计算公式为:
26、其中,表示残差信号,表示差值信号,为添加随机白噪音的次数,为时间,为正负白噪音的初始化总体平均次数;
27、根据各阶imf分量和残差信号,计算分解信号,所述分解信号的计算公式为:
28、其中,为分解信号,为第阶imf分量,为所分解的本征模态函数的总阶数,表示残差信号。
29、进一步地,所述随机白噪音满足如下规律:
30、其中,为集合的次数,为随机白噪音的幅值,为原始分裂波束信号和重构信号的偏离误差。
31、进一步地,所述随机白噪音为带限随机白噪音,所述带限随机白噪音的计算公式为:
32、其中,为带限随机白噪音,表示原始随机白噪音,表示信号频率,为分裂波束声学探测系统的换能器接收信号的不同主频,为用于改变噪音频宽的参数,, i表示第 i个频段, n表示滤波器对随机白噪音所划的频段总数量。
33、进一步地,所述步骤s4包括:
34、步骤s4.1:对各阶imf分量进行小波分析,获取低频imf分量和高频imf分量;
35、步骤s4.2:采用改进的小波阈值去噪方法,对所述高频imf分量进行小波阈值去噪处理,改进的小波阈值去噪方法的计算公式为:
36、其中,为小波阈值去噪后的高频imf分量,,,为符号函数,为高频imf分量,为小波阈值;
37、步骤s4.3:计算的峭度值,根据所述峭度值优化小波阈值的取值,将优化后的小波阈值代入步骤s4.2,获得小波阈值去噪后的imf分量;
38、所述峭度值的计算公式为:
39、其中,为峭度值,为信号均值,为信号标准差,为信号值。
40、进一步地,所述步骤s5包括:
41、根据所述目标体分布规律和目标体所在工区的水层模拟信号,对所述小波阈值去噪后的imf分量进行筛选,获得有利于识别目标体的小波阈值去噪后的imf分量;
42、将所述有利于识别目标体的小波阈值去噪后的imf分量和残余分量进行组合重构,获得重构信号,所述重构信号为:
43、其中,为重构信号,为有利于识别目标体的小波阈值去噪后的imf分量,表示残余分量。
44、第二方面,本技术提供了一种分裂波束数据处理装置,包括:
45、数据预处理模块,用于对原始分裂波束信号进行预处理,绘制水层剖面图和航线坐标图,得到剖面信息、航线坐标和输入数据;
46、水层模拟信号获取模块,用于根据所述剖面信息和输入数据,确定目标体分布规律以及水层深度,根据所述航线坐标和水层深度,定位目标体所在工区,模拟目标体所在工区的水层信号特征,获得目标体所在工区的水层模拟信号;
47、模态分量获取模块,用于在所述原始分裂波束信号中加入适用于分裂波束信号的随机白噪音,再进行ceemd分解,得到各阶imf分量;
48、小波阈值去噪模块,用于对各阶imf分量进行改进的小波阈值去噪,获得小波阈值去噪后的imf分量;
49、数据重构模块,用于根据所述目标体分布规律和目标体所在工区的水层模拟信号,挑选有利于识别目标体的小波阈值去噪后的imf分量和残余分量进行组合重构,获得重构信号。
50、第三方面,本技术提供了一种电子设备,包括:
51、处理器;
52、存储器;
53、以及计算机程序,其中所述计算机程序被存储在所述存储器中,所述计算机程序包括指令,当所述指令被所述处理器执行时,使得所述电子设备执行第一方面中任意一项所述的方法。
54、第四方面,本技术提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行第一方面中任意一项所述的方法。
55、本技术根据分裂波束的分频特性,提出一种适用于分裂波束的数据处理方法,通过设计带限随机白噪音,以及改进模态分解流程,将模态分解与分裂波束的分频性质很好的结合起来,并且通过改进的小波阈值方法,结合峭度值进一步优化小波阈值方法,进行小波阈值去噪,在提高去噪效果的同时,提高了重构信号与真实信号逼近程度。最后根据所述目标体分布规律和目标体所在工区的水层模拟信号,挑选有利于识别目标体的小波阈值去噪后的imf分量和残余分量进行组合重构,获得重构信号,进一步提高了重构信号的精度。综上,本技术的方法,结合分裂波束特性,将采集的声学信号进行平稳化处理,将不同尺度下波动或变化趋势逐级分解开来,最大限度压制了高频噪音,提高了分裂波束数据的信噪比,从信号的瞬时属性中获取了更多的有用信息,提高了目标体边界分辨度,目标体识别特征更加清晰,最终获得真实水层信息。
- 还没有人留言评论。精彩留言会获得点赞!