光学传感器的光衰自校准方法、基站及自移动设备与流程
本发明涉及光学传感器,具体而言涉及一种光学传感器的光衰自校准方法、基站及自移动设备。
背景技术:
1、随着技术的发展,自移动设备已越来越广泛地应用于各个领域,代替人工完成多项工作。在自移动设进行作业的过程时,可能会遇到有台阶、楼梯或者高度落差的区域,由此需要自移动设备在行进的过程中,能够准确检测到悬崖,并做出避让反应,以避免自移动设备发生跌落。
2、目前,通常利用安装在自移动设备的光学传感器来探测待作业区域是否存在悬崖,即利用光学传感器的光发射部向待作业区域发射光线,该出射光被待作业区域的表面反射后形成反射光,然后通过光学传感器的光接收部接收到的反射光的光强,就能够判定待作业区域是否存在悬崖。
3、但是,现有的光发射部随着使用时间的增长,会产生光衰现象,即光发射部所发出光线的光强会减弱,从而使得光接收部所接收到的反射光的光强也减弱,进而易导致待作业区域是否存在悬崖的判定结果错误,也就使光学传感器检测的准确性降低。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、第一方面,本发明实施例提供了一种光学传感器的光衰自修正方法,包括:
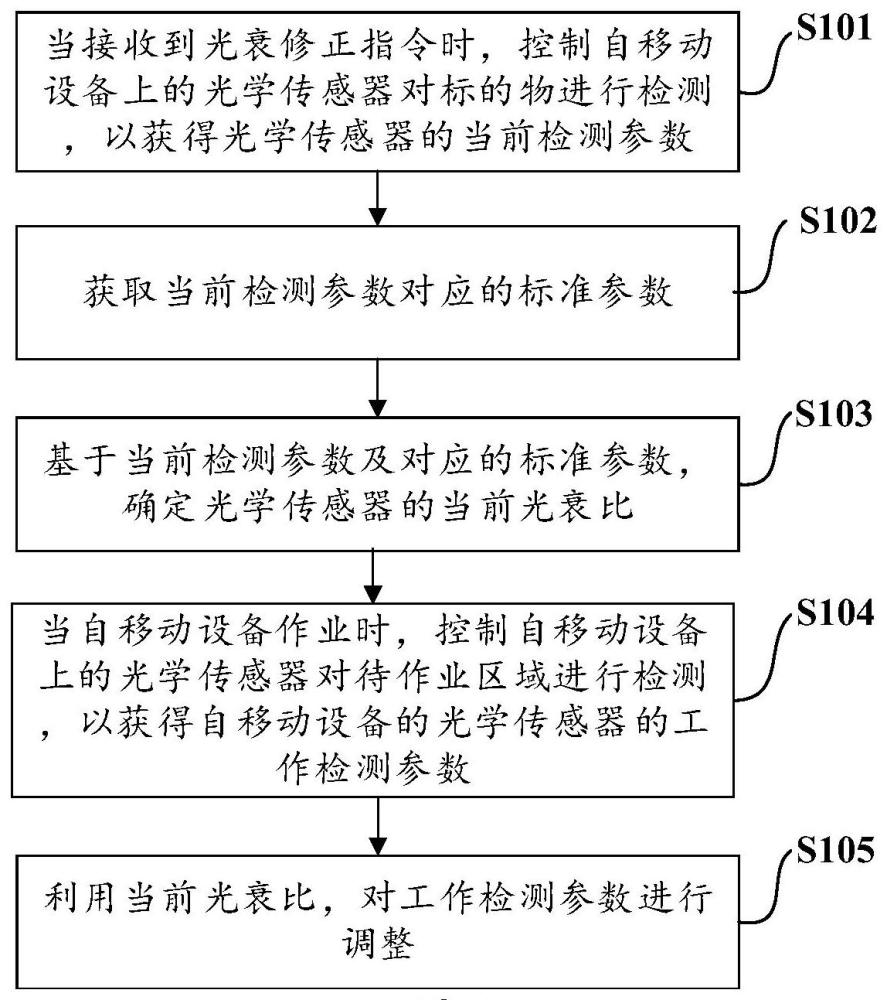
3、当接收到光衰修正指令时,控制自移动设备上的光学传感器对标的物进行检测,以获得所述光学传感器的当前检测参数;
4、获取所述当前检测参数对应的标准参数;
5、基于所述当前检测参数及对应的标准参数,确定所述光学传感器的当前光衰比;
6、当所述自移动设备作业时,控制所述自移动设备上的光学传感器对待作业区域进行检测,以获得所述自移动设备的光学传感器的工作检测参数;
7、利用所述当前光衰比,对所述工作检测参数进行调整。
8、可选地,所述控制自移动设备上的光学传感器对标的物进行检测,以获得所述光学传感器的当前检测参数,包括:
9、控制所述自移动设备的光学传感器运动至所述与标的物相对的位置;
10、控制所述光学传感器的光发射部,向所述标的物发射出射光线,以使所述光学传感器的光接收部接收到至少部分反射光线,所述反射光线为所述出射光线经由所述标的物表面反射而形成的光线;
11、获得所述光发射部的当前出射光强值,或者所述光接收部的当前接收光强值。
12、可选地,获取所述当前检测参数对应的标准参数之前,包括:
13、在所述自移动设备出厂前,使所述自移动设备的光学传感器处于与所述与检验位的标的物相对的位置;
14、控制所述光学传感器的光发射部,向所述检验位的标的物发射出射光线,以使所述光学传感器的光接收部接收到至少部分反射光线;
15、将所述光发射部的出射光线的光强值确定为标准发射光强值,以及将光接收部的接收光线的光强值确定为标准反射光强值。
16、可选地,所述标的物为设置在所述基站上的标准板或者至少部分坡道,所述标准板或者至少部分所述坡道位于在自移动设备与基站对接成功时所述基站上或所述坡道与所述光学传感器相对应的位置。
17、可选地,所述控制所述自移动设备的光学传感器运动至所述与标的物相对的位置,包括:
18、控制所述自移动设备移动至所述基站上;
19、当所述自移动设备与所述基站对接成功,或者自移动设备与所述基站的第一目标壁面之间的距离为预设距离时,确定所述自移动设备的光学传感器运动至所述与标的物相对的位置。
20、可选地,所述控制所述自移动设备移动至所述基站上之后,包括:
21、控制自移动设备对所述标的物表面的清洁度进行检测;
22、判断所述清洁度是否小于清洁度阈值,若是,则控制所述自移动设备的清洁头对所述标的物的表面进行清洁,或发出清洁提醒。
23、可选地,所述标的物为自移动设备内的第二目标壁面。
24、可选地,所述控制所述自移动设备的光学传感器运动至所述与标的物相对的位置,包括:
25、控制所述自移动设备的光学传感器向朝向所述第二目标壁面的方向转动预设角度或移动预设距离,以使所述光学传感器运动至所述与标的物相对的位置。
26、可选地,所述基于所述当前检测参数及对应的标准参数,确定对应的当前光衰比,包括:
27、计算所述当前出射光强值与所述标准发射光强值的第一比值;
28、将所述第一比值确定为第一当前光衰比;
29、或者,计算所述当前接收光强值与所述标准反射光强值的第二比值;
30、将所述第二比值确定为第二当前光衰比。
31、可选地,所述工作检测参数包括当前光强阈值;所述利用所述当前光衰比,对所述工作检测参数进行调整,包括:
32、将所述当前光强阈值乘以所述第一当前光衰比,得到所述校准光强阈值;
33、将当前光强阈值替换为所述校准光强阈值。
34、可选地,所述工作检测参数包括在所述自移动设备作业时,所述光学传感器向所述待作业区域发射的出射光的第一光强值;所述利用所述当前光衰比,对所述工作检测参数进行调整,包括:
35、将所述第一光强值除以所述第一光衰比,得到第一光强校准值;
36、根据所述第一光强校准值,增加所述光发射部的出射光线的光强值,直至达到所述第一光强校准值为止。
37、可选地,所述工作检测参数包括在所述自移动设备作业时,所述光学传感器的光接收部接收到的第二光强值;所述利用所述当前光衰比,对所述工作检测参数进行调整,包括:
38、将所述第二光强值除以所述第二光衰比,得到第二光强校准值;
39、将所述第二光强值替换为第二光强校准值。
40、第二方面,本发明实施例提供了一种自移动设备,包括主体,所述主体上设有光学传感器;所述光学传感器包括光发射部、光接收部以及控制器;
41、其中,所述光接收部用于接收至少部分反射光,所述反射光为光发射部的出射光线经由所述标的物或待作业区域反射所形成的光线;所述控制器用于执行上述的光学传感器的光衰自修正方法。
42、第三方面,本发明实施例提供了一种自移动设备,包括主体,所述主体上设有标的物以及可转动的光学传感器;所述光学传感器包括运动驱动部件、光发射部、光接收部以及控制器;
43、其中,所述运动驱动部件用于驱动所述光发射部以及光接收部转动预设角度或移动预设距离,所述光接收部用于接收至少部分反射光,所述反射光为光发射部的出射光线经由所述标的物或待作业区域反射所形成的光线;所述控制器用于执行上述的光学传感器的光衰自修正方法。
44、可选地,所述标的物为自移动设备内的第二目标壁面。
45、第四方面,本发明实施例提供了一种基站,包括基体,所述基体上设有标的物。
46、可选地,所述标的物为标准板或者至少部分坡道。
47、可选地,所述标准板或者至少部分所述坡道位于在自移动设备与基站对接成功时所述基站上或坡道与自移动设备上的光学传感器相对应的位置。
48、根据本发明实施例所提供的一种光学传感器的光衰自校准方法、基站及自移动设备,当接收到光衰修正指令时,控制自移动设备上的光学传感器对标的物进行检测,以获得光学传感器的当前检测参数;获取当前检测参数对应的标准参数;基于当前检测参数及对应的标准参数,确定光学传感器的当前光衰比,从而使得光学传感器的当前光衰比与光学传感器的实际光衰情况更加相符;然后当自移动设备作业时,控制自移动设备上的光学传感器对待作业区域进行检测,以获得自移动设备的光学传感器的工作检测参数;利用当前光衰比,对工作检测参数进行调整,以消除光学传感器的光衰或光学传感器光衰的影响,从而避免了光发射因出射光线的光强减弱,而导致待作业区域是否存在悬崖的判定结果错误的情况发生,进而保证光学传感器检测在长时间使用的情况下,仍具有较高的检测精度。
- 还没有人留言评论。精彩留言会获得点赞!