基于偏振双向反射分布函数的水下偏振成像方法
本发明属于激光偏振成像,尤其是一种基于偏振双向反射分布函数的水下偏振成像方法。
背景技术:
1、水下环境复杂多变,光波在水下传输的过程中,除了水体对光的吸收外,水体中的泥沙和可溶性物质会对光产生散射作用,由于光波波长与其粒径大小相当,光波在水中的散射要比声波大的多。水体对光的吸收和散射作用,使得水下成像过程存在严重的“帷幔效应”,造成水下图像细节的大量丢失,图像对比度大幅度下降。
2、由于传统水下成像技术存在着成像系统体积大,成本高等问题,为水下探测工作带来了极大的困难。偏振成像凭借着其性价比高,设备简单,可以将目标信息光和背景光分离等优势,受到越来越多研究人员的青睐。但是,由于偏振成像过程中会出现许多不确定不可控的因素,因此对水下偏振成像过程进行可视化分析,直观的展示水下光学传输特性和目标反射特性对水下激光偏振成像系统的影响;全面地分析水下偏振成像系统偏振特性的变化规律。如何提前规避可能出现的问题,对系统进行优化设计,为实验平台的搭建提供参数支持是目前迫切需要解决的问题。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种基于偏振双向反射分布函数的水下偏振成像方法,其利用monte-carlo算法和oren-nayar偏振双向反射分布函数对水下偏振成像系统中水中光波散射过程和目标表面反射过程两部分进行数值仿真,精确模拟水下偏振成像过程,从而获取更加准确的偏振信息。
2、本发明解决现有的技术问题是采取以下技术方案实现的:
3、一种基于偏振双向反射分布函数的水下偏振成像方法,包括以下步骤:
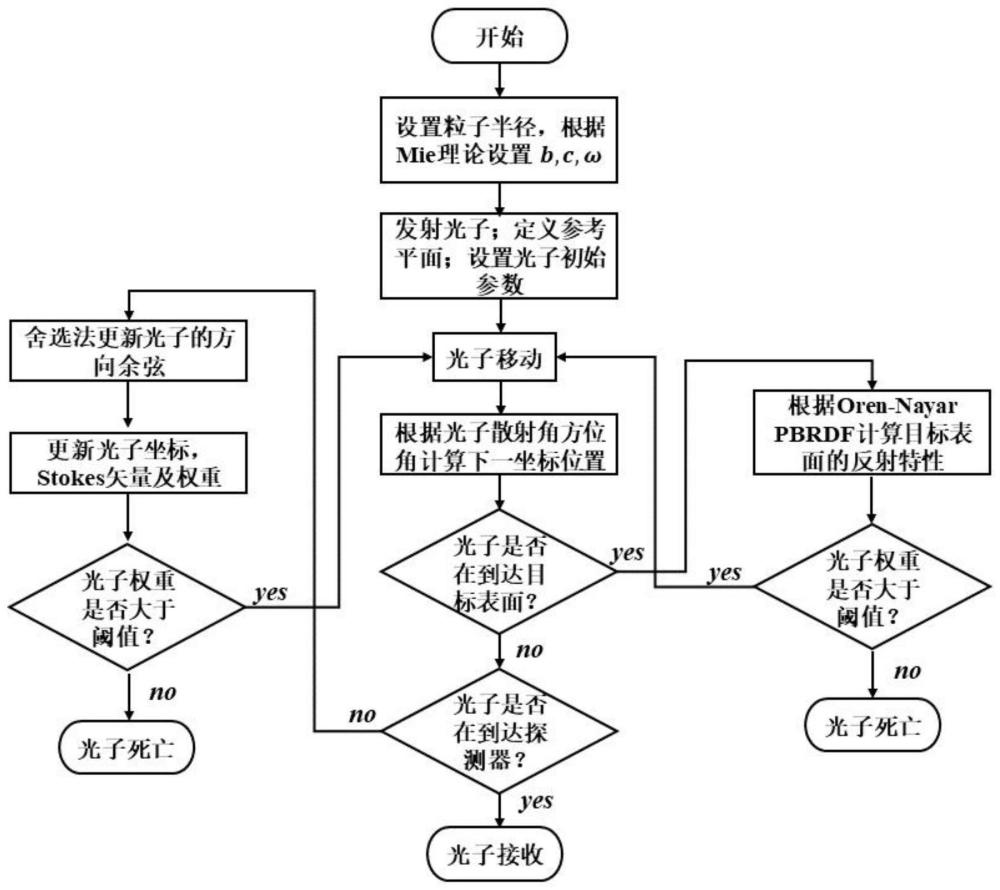
4、步骤1、设置水体环境:水中悬浮粒子和可溶性物质均匀分布在水体中,并且具有统一粒径和复折射率;根据给定粒子的尺度参数,计算水体的散射系数和消光系数;
5、步骤2:设置光子初始位置位于坐标原点,z轴正方向为光子传播方向;发射激光为具有特定发散半角和光束宽度的高斯光束,根据发散半角和光束宽度计算光束的焦距和光束半径的采样值;根据伪随机数计算入射光的散射角θ0和方位角获取光子的初始方向余弦;通过设定初始stokes矢量将发射光束转变为线偏振光;
6、步骤3、根据步骤1和步骤2设置的参数,利用monte-calor算法模拟光子在水介质中的传播过程,分析不同悬浮粒子半径下光子散射效应对光子偏振特性的影响;
7、步骤4、根据光子坐标判断光子是否到达目标表面,如未到达则继续传播;反之,则根据光子的散射角和方位角,利用oren-nayar偏振双向反射分布函数计算光子在目标表面反射过程中镜面反射部分和漫反射部分的取值;
8、步骤5、判断光子是否到达探测器表面,根据高斯物像公式获取目标二维强度图像。
9、进一步,所述步骤1中水中悬浮粒子和可溶性物质均为单个球型颗粒,其粒径分别为2μm、3μm或4μm,复折射率m=1.52-0.0001i,单位体积内水中粒子数为2×1010,粒子的尺度参数α=2πr/λ。
10、进一步,所述步骤1根据mie散射理论,计算水体的散射系数和消光系数,其计算公式为:
11、
12、其中,qsca为散射效率因子;qext为消光效率因子。
13、进一步,所述步骤2发射的激光参数如下:发散半角为0.1mrad和光束宽度为1mm的高斯光束,波长为532nm;光束的焦距为:fl=-wwidth/φdiv,光束半径的采样值为:其中wwidth为光束宽度,φdiv为发散半角,ξ为均匀分布在0~1之间的伪随机数,初始发射光子数为5×107。
14、进一步,所述步骤3的具体实现方法为:
15、步骤3-1、根据步骤1和步骤2设定的参数,使用光子进行单次散射,对光子自由程的概率密度函数进行抽样得到光子两次碰撞间的距离,确定下一散射点的坐标;
16、步骤3-2、更新光子方位角、散射角、stokes矢量;
17、步骤3-3、单次散射完成后,根据单次反照率更新的光子权重;若光子权重大于阈值,则继续传输;反之,判定光子死亡,停止传输。
18、进一步,所述步骤3-2根据散射角和旋转角的联合概率密度分布函数,利用舍选法对散射角和旋转角进行更新,其具体实现方法为:分别在0~π,0~2π,0~1的范围内随机选取散射角、旋转角和随机数,当联合概率密度函数取值高于随机数时,认为旋转角和散射角符合条件,下一次散射方向及下一散射点坐标由本次散射角和方位角确定,同时记录光子位置,判断其是否到达目标表面;利用穆勒矩阵和旋转矩阵对光子的stokes矢量进行更新,其表达式为:
19、
20、中θ为光子的散射角;β为散射前stokes矢量从参考面旋转到散射面的旋转角;γ为散射完成后stokes矢量从散射面旋转到新的参考面的旋转角。
21、进一步,所述步骤4的具体实现方法为:
22、步骤4-1、根据步骤3得到的结果计算光子到达目标表面的入射角和方位角,根据微平面理论,对微面的反射法线进行随机采样,根据微平面法线计算出射方向的方向余弦、出射角和方位角;利用各角度间的几何关系计算出偏振双向反射分布函数出射光场矢量和入射光场矢量间的琼斯矩阵,并通过转换关系得到相应的穆勒矩阵,最终得到镜面反射部分;
23、步骤4-2:利用oren-nayar模型,结合半球定向反射概念得到漫反射成分;
24、步骤4-3:考虑粗糙表面对能量的吸收以及物体表面镜面反射和漫反射分量,根据oren-nayar偏振双向反射分布函数的矩阵形式,更新光子stokes矢量及光子权重;若光子权重大于阈值,光子继续传输,进行多次散射;反之,判定光子死亡,停止传输。
25、进一步,所述步骤4-1得到的镜面反射部分表示为:
26、
27、其中,mj,k为4×4的穆勒矩阵;θi,分别为入射方向的天顶角和方位角;θr,为出射方向的天顶角和方位角;θn为微平面法线和目标表面法线间夹角;
28、所述步骤4-2得到的漫反射成分表示如下:
29、
30、其中,为目标表面镜面反射比;σ表示目标表面粗糙程度;为物体表面光子入射方向方位角,为物体表面光子出射方向方位角;a(σ)=1-0.5σ2/(σ2+0.33),b(σ)=0.45σ2/(σ2+0.09),c=max[θi,θr],d=min[θi,θr]。
31、本发明的优点和积极效果是:
32、1、本发明通过将monte-carlo算法和oren-nayar偏振双向反射分布函数相结合对水下偏振成像系统中水中光波散射过程和目标表面反射过程两部分进行数值仿真,精确模拟水下偏振成像过程,从而获取更加准确的偏振信息,并通过实验验证了该方法的有效性。
33、2、本发明能够对水下偏振成像系统进行可视化分析,能够直观地展示了浑浊水体的散射特性和目标表面的反射特性对水下偏振成像系统性能的影响,揭示了系统偏振特性随水体浑浊度和目标表面特性的变化规律,具有较高的实用性。
34、3、本发明采用oren-nayar模型计算粗糙目标表面的漫反射的成分,其充分考虑目标表面的镜面反射和漫反射效应,获得的偏振信息更为准确。
- 还没有人留言评论。精彩留言会获得点赞!