一种变电站巡视机器人导航装置及导航方法与流程
本发明涉及巡检机器人,具体为一种变电站巡视机器人导航装置及导航方法。
背景技术:
1、随着高电压、大容量、大电网的迅速发展,电力系统的自动化程度越来越高,许多变电站都实现了无人值守。为了随时掌握变配电设备的运转情况,及时发现和消除设备存在的缺陷,确保电力设备的安全运行。
2、目前公开的专利号zl200410024231.2,名称为“电站设备智能自动巡检机器人”的专利中提出了一个采用机器人自动巡检变电设备运行状况的技术方案,该方案采用gps全球定位系统和激光测距传感器组成导航信息传递单元,其导航信息传递单元设备复杂,而且处在变配电设备的强电、磁场环境中,定位导航的精度较低,影响机器人的巡检工作质量。
技术实现思路
1、本部分的目的在于概述本发明的实施方式的一些方面以及简要介绍一些较佳实施方式。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、因此,本发明的目的是提供一种变电站巡视机器人导航装置及导航方法,采用rfid无源模块作为方向矫正节点,激光测距作为机器人在运行轨道中的位置辨识节点,二者相互补充机器人在轨道中的位置信息,从而实现维护成本较低的位置辨识与机器人导航。
3、为解决上述技术问题,根据本发明的一个方面,本发明提供了如下技术方案:
4、一种变电站巡视机器人导航装置,其包括:
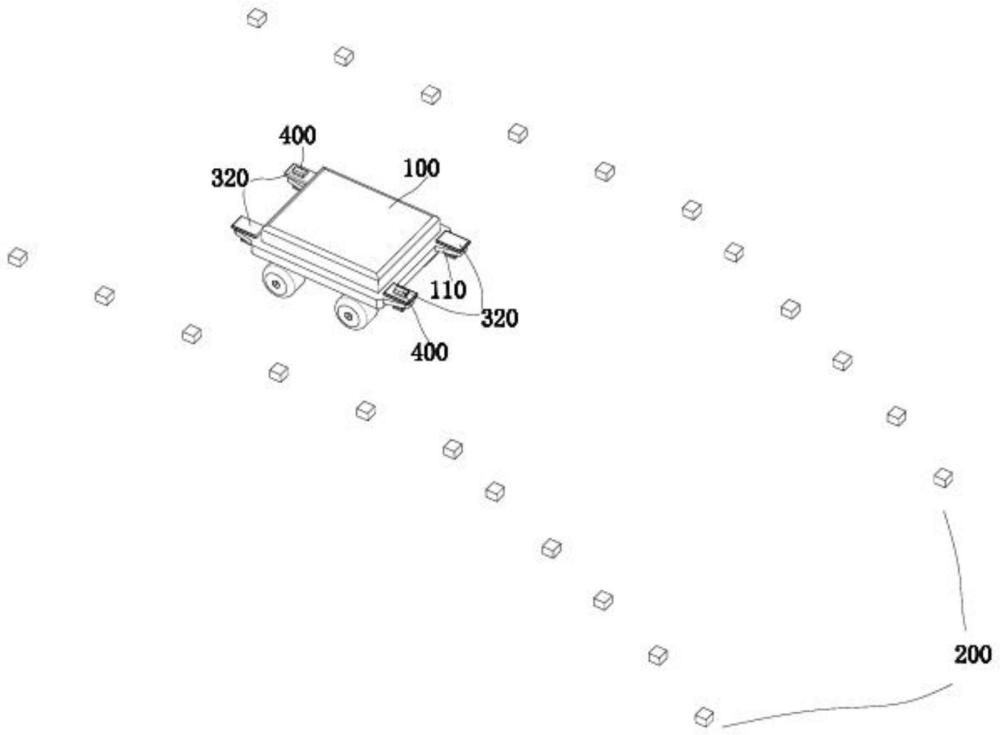
5、巡视机器人,其边部四角具有安装支架;
6、rfid标签,布置在所述巡视机器人的行走路径的道路两侧;
7、rfid读卡组件,包括安装在所述安装支架底部的旋转驱动电机和安装在所述旋转驱动电机的输出端的rfid标签读卡器;
8、激光测距传感器,安装在以巡视机器人中心对称的所述rfid标签读卡器的中心上侧;
9、其中,所述rfid标签读卡器为四个,所述激光测距传感器为两个。
10、作为本发明所述的一种变电站巡视机器人导航装置的一种优选方案,其中,所述rfid标签每8m的距离布置一对,每对rfid标签位于巡视机器人的行走路径的道路两侧。
11、作为本发明所述的一种变电站巡视机器人导航装置的一种优选方案,其中,所述rfid标签读卡器对所述rfid标签的读卡距离为0-5m。
12、一种变电站巡视机器人导航装置的导航方法,其包括导航过程中车身偏移角度的判断,具体步骤如下:
13、将机器人放置在道路中心位置,调整巡视机器人左上侧的rfid标签读卡器角度α2-α1,左下侧rfid标签读卡器角度α3-α4,其中α1=α4,α3=α2,调整标签安装角度,使得α2-α1为左上侧读卡器读卡范围角,α3-α4为左下侧读卡器范围角;
14、此时,当巡视机器人平行行走在轨道中心线时,rfid标签读卡器读卡边缘角α4、α1近似相等,通过调整α4、α1角度的对称性,可以判断巡视机器人车身方位角是否平行轨道中心线,当读卡器边缘角α1>α4,显然有车身右下偏移α1-α4度,可以调整巡视机器人车身,使得α1=α4;
15、其中,巡视机器人边缘角的判断可以根据rfid标签读卡器读卡数据的成功与否测量,当据rfid标签读卡器处于边缘角时,据rfid标签读卡器读卡失效,再正向微调0.5°角,据rfid标签读卡器即可读卡成功,此时,该角度就是读卡器边缘角,当车体向前运动时,据rfid标签读卡器的边缘角α1-α4角度减小。
16、作为本发明所述的一种变电站巡视机器人导航装置的导航方法的一种优选方案,其中,还包括机器人重启后车体读卡器边缘角跟踪步骤:
17、将四个rfid标签读卡器角度均偏转到0°角;
18、按0.1°角的步距,逐步加大rfid标签读卡器角度,每个角度位置停留100ms,等待读卡反馈,记录四个rfid标签读卡器的第一个读卡反馈角α01、α04,如角度运行到180°,四个rfid标签读卡器均未扫描到读卡反馈角,则出偏离运行轨道信息,等待人工处置,如角度运行到180°,前后对称的rfid标签读卡器只有一组扫描到读卡反馈角,则出轨迹点故障或读卡器故障信息,等待人工处置;
19、如果前后对称rfid标签读卡器两组均有读卡反馈,则按0.1°角的步距,逐步减少角度值,每个角度位置停留500ms,等待读卡反馈,直到读卡反馈消失后,读卡器旋转角再加0.1°角,分别标记该角度为α1、α4;
20、继续旋转rfid标签读卡器,返回到α01、α04,按0.1°角的步距,逐步增加角度值,每个角度位置停留500ms,等待读卡反馈,直到读卡反馈消失后,读卡器旋转角再减去0.1°角,分别标记该角度为α2、α3;
21、比较α1、α4,α2、α3差值,计算车身与轨道方位角;
22、如果|α1-α4|>0.5,调整车身轨道方位角,同时在读卡反馈消失后,每次微调α1、α4,步距0.1°角,每个角度位置停留500ms,直到读卡反馈获取,实现读卡器方位跟踪,直到|α1-α4|<0.5,则表示机器人方位正确。
23、作为本发明所述的一种变电站巡视机器人导航装置的导航方法的一种优选方案,其中,还包括机器人车体读卡器边缘角跟踪步骤:
24、如果|α1-α4|>0.5,调整车身轨道方位角,同时在读卡反馈消失后,每次微调α1、α4,步距0.1°角,每个角度位置停留500ms,直到读卡反馈获取,实现读卡器方位跟踪,直到|α1-α4|<0.5,则表示机器人车体读卡器边缘角跟踪及方位正确。
25、作为本发明所述的一种变电站巡视机器人导航装置的导航方法的一种优选方案,其中,还包括机器人导航方位及轨道中心偏离调整步骤:
26、当巡视机器人在车体读卡器边缘角时,激光测距传感器获取到激光测距信息l1和l2;
27、获取并计算车身倾斜角β2以及偏差信息dp;
28、当β2>0,则车体偏向右上侧,当dp<0,车体保持原方向,直到dp=0,当dp>0,车体向右偏转,直到β2=0,车体与中心轨道平行;
29、当β2<0,则车体偏向右下侧,当dp>0,车体保持原方向,直到dp=0,当dp<0,车体向左偏转,直到β2=0,车体与中心轨道平行;
30、当β2=0,若dp>0,车体向右偏转,直到dp=0,若dp<0,车体向左偏转,直到dp=0,当dp=0,若β2>0,车体向左偏转,直到β2=0,若β2<0,车体向右偏转,直到β2=0;
31、回到获取并计算车身倾斜角β2以及偏差信息dp步骤,反复调整,保持β2=0,dp=0,即沿着中心轨迹行走。
32、与现有技术相比,本发明具有的有益效果是:本发明充分应用rfid读卡器和rfid卡片安装形态的特征,获取相对精确的机器人移动行走位置以及方位角,从而实现其在指定轨道上的行走轨迹。结合rfid和激光两种廉价的定位源,可以快速部署机器人行走轨道。轨道定位点失磁情形下易于检测、也易于更换,激光测距进一步校准了机器人轨道中的行走位置,实现机器人毫米级的移动精准作业定位。
- 还没有人留言评论。精彩留言会获得点赞!