多点三维扫描激光缺陷测量系统及方法与流程
本发明涉及激光振动测量,具体涉及一种多点三维扫描激光缺陷测量系统及方法。
背景技术:
1、激光多普勒测量技术是一种高精度的非接触式测量技术,它利用相干激光光波照射在物体表面,通过测量微小区域反射回的光波的多普勒频率来精确获取该测点的振动速度及物体表面的振动状态。这一技术的优势在于无需直接接触目标物体,能够提供准确而细致的振动信息。工程中的许多结构和部件的振动是三维的,即物体表面某一点的振动(速度)可被分解成两个面内分量(vx,vy)和一个离面分量vz,当进行三维的激光振动测量时,需要使用三束激光照射被测点。如图1所示,在光路布置中,光束zz沿z轴方向,用于测量vz,从而可得:
2、vzx=vzcosθ+vxsinθ (1)
3、vzy=vzcosψ+vysinψ (2)
4、由(1)式、(2)式可得:
5、vx=(vzx-vzcosθ)/sinθ (3)
6、vy=(vzy-vzcosψ)/sinψ (4)
7、利用多普勒频移测量速度的最直接的方法是使用高分辨率的光谱仪分析来自振动物体的散射光。由于物体实际的振动速度比光速小得多,例如,当波长l为6328×10-10米/秒、振动物体的速度为10米/秒时,可获得he-ne激光的多普勒频移的最大值,按(1)-(4)计算,可得d=31.6mhz df,而激光本身的频率f很高(约为4.74′1014hz),即dfd/f=6.67′10-8。
8、因此,直接测量多普勒频率dfd是不切实际的。然而,在多普勒频移足够大的情况下,可以利用高分辨率的法布里-珀罗干涉仪(fabry-perot)进行测量。一般而言,大多数物体振动引起的多普勒频移通常在几十千赫兹到几十兆赫兹的范围内,这超出了光谱仪的分辨率。为了应对这一挑战,光学差拍和参考光技术成为必要手段,以实现对多普勒频移的精确测量。这种方法能够有效应对高频振动,并提供更为精准的激光多普勒测量结果。
9、另外,在传统的激光振动测量技术中,不论是单点测量还是整个表面的扫描测量,通常只提供了物体的结构振动特性,而未能提供物体整体的三维振动特性。近年来出现的三维激光振动测量技术通过三个单点激光振动仪器发出三束光束,以监测被测物体在三个方向上的振动。然而,这种测量技术存在一些缺陷,其中之一是需要多台激光振动仪,而且所测得的物体运动状态参数并非实时的。实时性的不足意味着需要通过投影计算后才能获取某一时刻被测物体在三维方向上的运动参数。
技术实现思路
1、本发明的目的在于提供一种多点三维扫描激光缺陷测量系统及方法,用以解决现有技术中的三维激光振动测量中遇到的问题。
2、本发明一方面提供了一种多点三维扫描激光缺陷测量方法,单一的激光光源发出激光光束,所述激光光束经过光学发射系统进行分光处理后,形成多束测量光束,所述多束测量光束包括x、y、z三个方向的测量光,所述多束测量光束同时照射在被测物体上并经所述被测物体反射,形成多束反射光束,所述反射光束携带所述被测物体在三维方向的运动信息,所述反射光束经光学接收系统接收处理后,传送到光学处理系统,获取反映被测物体运动姿态的光电信号及图像,通过单一的激光光源,经光学发射系统的处理将光束分割成x、y、z三个方向的测量光,以获取更全面和准确的振动信息,实时测得被测物体在三维方向的振动信息和运动姿态。
3、进一步的,所述多束测量光束具体为五束,其中:两束为测量被测物体x方向运动参数的测量光束,两束为测量被测物体y方向运动参数的测量光束,一束为测量被测物体z方向运动参数的测量光束。
4、进一步的,所述激光光束经过光学发射系统进行分光处理后还形成一束与所述测量光束进行对比的参照光束,所述参照光束直接传送到光学处理系统。
5、进一步的,所述光学发射系统对激光光束的处理还包括移频、聚焦和透射处理;所述光学接收系统对反射光束的处理还包括透射、反射、聚焦和分光处理;所述光学处理系统还包括对被测物体成像的处理。
6、进一步的,所述测量光束在照射到被测物体上前与激励脉冲激光经共光路元件共光路,测量光束和激励脉冲激光同时到达被测物体表面,利用激励脉冲激光使被测物体表面产生超声振动,测量光束探测由激励脉冲激光导致的超声振动,从而判断被测物体表面是否有缺陷,实现非接触式测量。
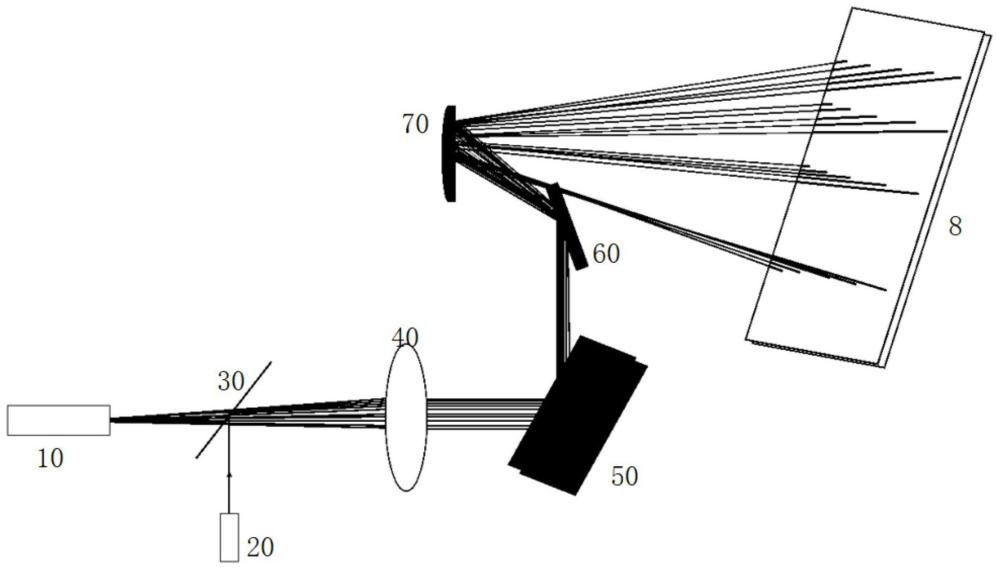
7、本发明另一方面提供一种多点三维扫描激光缺陷测量系统,包括光学发射系统、光学接收系统和光学处理系统,所述光学发射系统包括激光光源、第一分光元件组、第一聚焦元件组,激光光源发出激光光束经第一分光元件组、第一聚焦元件组处理后形成多束x、y、z三个方向的测量光束,测量光束照射到被测物体上,并经被测物体反射形成多束反射光束,所述光学接收系统包括第二分光元件组和第二聚焦元件组,所述光学处理系统包括光电探测器,反射光束经第二分光元件组和第二聚焦元件组处理后传送到光电探测器,还包括提供照明的led。
8、进一步的,所述第一分光元件组包括第一直角棱镜和沿第一直角棱镜的光输出方向直线排列的第一分光棱镜a、第一分光棱镜b、第一分光棱镜c,激光光源发出的单束激光光束经第一直角棱镜转向、第一分光棱镜a、第一分光棱镜b、第一分光棱镜c分光后,将单束激光光束分为x、y、z三个方向的三束测量光束,所述第一分光棱镜a、第一分光棱镜b、第一分光棱镜c的光输出方向分别设置第一分光移频元件a、第一分光移频元件b、第一分光移频元件c,所述第一分光移频元件a的输出光分两路,在两个光输出方向分别设置第一分光元件a和第一分光元件b,x方向的测量光束经过第一分光移频元件a后分成两束固定模式的光,并产生频移,经第一分光元件a和第一分光元件b后形成两束平行光输出,所述第一分光移频元件b的光输出方向顺序设置第一分光元件c、第二直角棱镜和第二分光棱镜,y方向的测量光束经第一分光移频元件b后分成两束固定模式的光束,并产生频移,经第一分光元件c后两束光平行输出,经过第二直角棱镜改变光束方向、及第二分光棱镜的反射后输出,所述第一分光移频元件c的光输出方向设置第三分光棱镜,所述第三分光棱镜的输出光分两路,一路沿光输出方向设置第四分光棱镜,另一路沿光输出方向顺序设置第三直角棱镜、第四直角棱镜和第五分光棱镜,z方向的测量光束经第一分光移频元件c后分成两束固定模式的光,并产生频移,经过第三分光棱镜把z方向测量光束分成参考光束和z方向测量光束,z方向测量光束经第四分光棱镜改变光路传播方向后输出,参考光束经第三直角棱镜、第四直角棱镜和第五分光棱镜改变光路传播方向后输出,所述第一分光元件a、第一分光元件b、第二分光棱镜和第四分光棱镜的光输出方向设置第一聚焦元件组;
9、所述第一聚焦元件组包括沿测量光束入射方向顺序设置的第一聚焦透镜、第二聚焦透镜和物镜,所述第二聚焦透镜和物镜之间设置第一扫描激光振镜,所述被测物体设置在物镜的测量光束输出方向,第一分光元件组输出的x、y、z三个方向的三束测量光束,再经过第一聚焦透镜、第二聚焦透镜聚焦及扫描激光振镜透射后,通过物镜把光束聚焦到被测物体的测量点上,被测物体反射光束,形成携带被测物体x、y、z三个方向振动信息的反射光束;
10、所述第二聚焦元件组包括沿反射光束入射方向顺序设置的物镜、第三聚焦透镜、第四聚焦透镜,所述物镜和第三聚焦透镜之间设置第一扫描激光振镜,所述第四聚焦透镜的光输出方向设置第二分光元件组,携带被测物体x、y、z三个方向振动信息的反射光束,经物镜的透射、扫描激光振镜的反射、第三聚焦透镜、第四聚焦透镜的聚焦将反射光束输出至第二分光元件组;
11、所述第二分光元件组包括沿反射光束入射方向顺序设置的第六分光棱镜,分光镜和第七分光棱镜,携带被测物体x方向振动信息的反射光束经第六分光棱镜分光后输出至光电探测器,携带被测物体y、z两个方向振动信息的反射光束经第六分光棱镜,分光镜和第七分光棱镜分光后输出至光电探测器,所述第七分光棱镜设置于第五分光棱镜的光输出方向,参考光束经第七分光棱镜分光后输出至光电探测器。
12、进一步的,所述光电探测器包括第一光电探测器和第二光电探测器,所述第一光电探测器用于探测被测物体在x方向运动信息的光束,并将其转换成电信号,所述第二光电探测器用于探测被测物体在y和z方向运动信息的光束,并将其转化成电信号,所述第一光电探测器设置于所述第六分光棱镜的反射光输出方向,所述第二光电探测器设置于所述第七分光棱镜的投射光输出方向。
13、进一步的,还包括激励脉冲激光,所述激励脉冲激光和第一聚焦元件组输出的测试光束经共光路元件共光路,所述共光路元件包括沿光的入射方向顺序设置的半透半反镜、激光整形透镜组、激光反射镜、第一可控振镜、第二可控振镜,激励脉冲激光和第一聚焦元件组输出的测试光束半透半反镜、激光整形透镜组、激光反射镜、第一可控振镜、第二可控振镜实现共光路,同时到达被测物体表面,让打在背测表面物体上的激励脉冲激光和测量激光光束更加接近,更加准确;另外,让激励脉冲激光和测量激光光束同时在被测物体表面上扫描,实现了多点激励、多点测量的同时进行。
14、进一步的,所述光学处理系统还包括电荷耦合元件,用于接收反射光束并对被测物体进行成像处理,所述第七分光棱镜的反射光束反射方向设置透镜,所述电荷耦合元件设置于所述透镜的光输出方向。
15、采用上述本发明技术方案的有益效果是:
16、本发明通过单一激光光源,经过分光元件等处理后形成五束x、y、z三个方向的测量光束发射到被测物体上,能够实时测量被测物体在三维方向的振动信息及运动姿态,且动态测量范围广、测量精度高;
17、利用激励脉冲激光使被测物体表面产生超声振动,测量光束探测由激励脉冲激光导致的超声振动,从而判断被测物体表面是否有缺陷,实现非接触式测量;
18、激励脉冲激光和测量激光光束共光路,同时到达被测物体表面,让打在背测表面物体上的激励脉冲激光和测量激光光束更加接近,更加准确;另外,让激励脉冲激光和测量激光光束同时在被测物体表面上扫描,实现了多点激励、多点测量的同时进行。
- 还没有人留言评论。精彩留言会获得点赞!