基于人工智能的北斗定位数据处理方法及系统与流程
本技术涉及北斗定位,具体而言,涉及一种基于人工智能的北斗定位数据处理方法及系统。
背景技术:
1、在当前的北斗定位系统中,由于多种外部因素(如信号干扰、建筑物遮挡、天气变化等)的影响,定位精度可能会受到不同程度的影响。为了确保北斗定位系统的稳定性和准确性,需要对北斗定位系统进行监测和异常定位处理。传统的异常定位方法可能无法充分利用历史先验数据来预测和识别潜在的异常阶段,且对即时位置偏差的响应可能不够及时或精确。此外,现有技术可能没有一个有效的机制来自动更新异常定位观测机制以适应环境的变化。
技术实现思路
1、为了至少克服现有技术中的上述不足,本技术的目的在于提供一种基于人工智能的北斗定位数据处理方法及系统。
2、第一方面,本技术提供一种基于人工智能的北斗定位数据处理方法,应用于北斗定位云服务系统,所述方法包括:
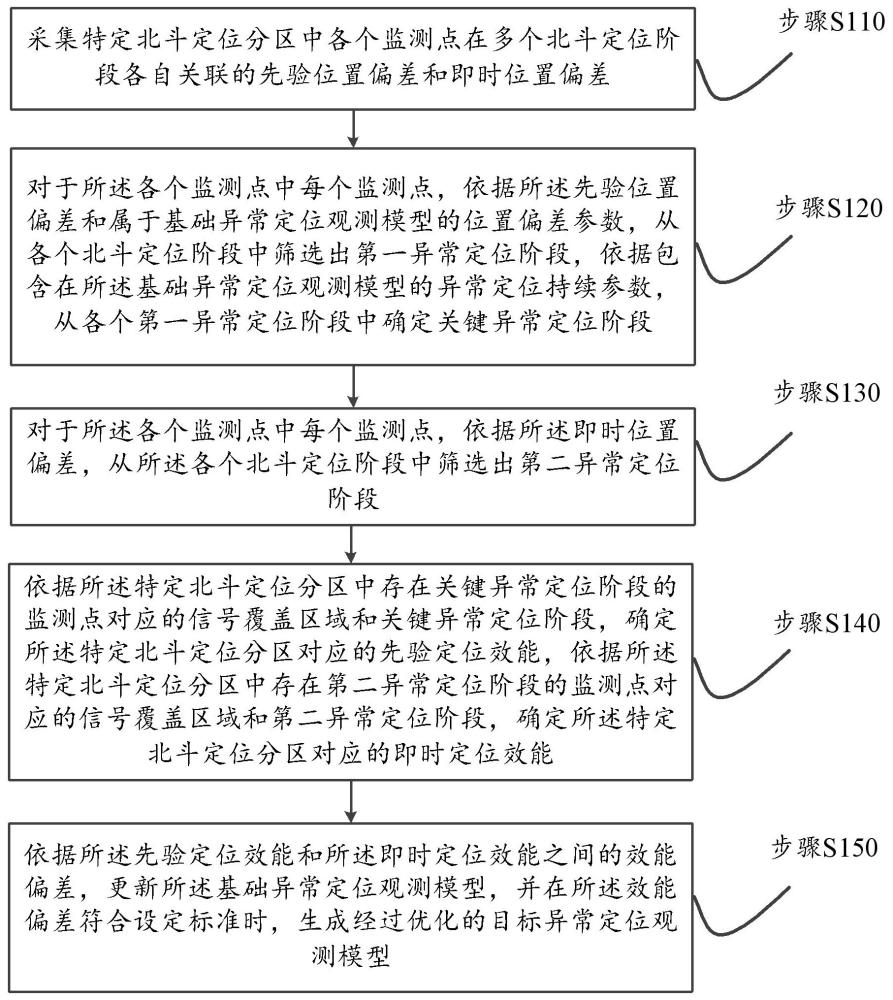
3、采集特定北斗定位分区中各个监测点在多个北斗定位阶段各自关联的先验位置偏差和即时位置偏差;
4、对于所述各个监测点中每个监测点,依据所述先验位置偏差和属于基础异常定位观测模型的位置偏差参数,从各个北斗定位阶段中筛选出第一异常定位阶段,依据包含在所述基础异常定位观测模型的异常定位持续参数,从各个第一异常定位阶段中确定关键异常定位阶段;
5、对于所述各个监测点中每个监测点,依据所述即时位置偏差,从所述各个北斗定位阶段中筛选出第二异常定位阶段;
6、依据所述特定北斗定位分区中存在关键异常定位阶段的监测点对应的信号覆盖区域和关键异常定位阶段,确定所述特定北斗定位分区对应的先验定位效能,依据所述特定北斗定位分区中存在第二异常定位阶段的监测点对应的信号覆盖区域和第二异常定位阶段,确定所述特定北斗定位分区对应的即时定位效能;
7、依据所述先验定位效能和所述即时定位效能之间的效能偏差,更新所述基础异常定位观测模型,并在所述效能偏差符合设定标准时,生成经过优化的目标异常定位观测模型;所述经过优化的目标异常定位观测模型,用于依据所述即时位置偏差估计所述特定北斗定位分区中存在关键异常定位阶段的监测点。
8、在第一方面的一种可能的实施方式中,所述采集特定北斗定位分区中各个监测点在多个北斗定位阶段各自关联的先验位置偏差和即时位置偏差,包括:
9、将特定北斗定位分区中各个监测点分别作为目标监测点;
10、获取目标监测点在多个北斗定位阶段各自关联的多个先验定位精度;同一个北斗定位阶段对应的多个先验定位精度是同一个北斗定位阶段在多个先验数据记录间隔各自关联的定位精度;
11、对于各个北斗定位阶段中每个北斗定位阶段,确定各个先验定位精度各自关联的定位精度标签,依据定位精度标签为目标精准性评价标签的先验定位精度的精度统计量在全局精度统计量中的权重,确定目标监测点在北斗定位阶段对应的先验位置偏差;
12、获取目标监测点在所述各个北斗定位阶段各自关联的即时定位精度作为目标监测点在所述各个北斗定位阶段各自关联的即时位置偏差;所述即时定位精度是在即时数据记录间隔对应的定位精度。
13、在第一方面的一种可能的实施方式中,所述对于所述各个监测点中每个监测点,依据所述先验位置偏差和属于基础异常定位观测模型的位置偏差参数,从各个北斗定位阶段中筛选出第一异常定位阶段,依据包含在所述基础异常定位观测模型的异常定位持续参数,从各个第一异常定位阶段中确定关键异常定位阶段,包括:
14、对于即时监测点,依据所述先验位置偏差和属于基础异常定位观测模型的位置偏差参数,将各个北斗定位阶段区分成第一异常定位阶段和第一非异常定位阶段;所述第一异常定位阶段对应的先验位置偏差不小于所述位置偏差参数;
15、将所述即时监测点对应的各个第一异常定位阶段和第一非异常定位阶段依据阶段次序进行整理,生成基础北斗定位阶段簇;
16、从所述即时监测点对应的基础北斗定位阶段簇中,获取按照顺序进展的各个第一异常定位阶段构建第一北斗定位阶段簇,确定所述第一北斗定位阶段簇的全局阶段参数作为第一累积异常阶段参数;
17、从所述即时监测点对应的各个第一北斗定位阶段簇中,将所述第一累积异常阶段参数不小于包含在所述基础异常定位观测模型的异常定位持续参数的第一北斗定位阶段簇作为第一目标北斗定位阶段簇,将所述第一目标北斗定位阶段簇中各个第一异常定位阶段作为所述即时监测点对应的关键异常定位阶段。
18、在第一方面的一种可能的实施方式中,所述方法还包括:
19、从所述即时监测点对应的基础北斗定位阶段簇中,确定在关联的两个第一异常定位阶段之间按照顺序进展的各个第一非异常定位阶段的全局阶段参数作为第一正常阶段参数,在所述第一正常阶段参数不大于包含在所述基础异常定位观测模型的非异常定位持续参数时,将所述第一正常阶段参数对应的各个第一非异常定位阶段转换成第一异常定位阶段,生成第一优化北斗定位阶段集合;
20、在所述即时监测点对应的第一优化北斗定位阶段集合中,获取按照顺序进展的各个第一异常定位阶段构建第二北斗定位阶段簇,确定所述第二北斗定位阶段簇的全局阶段参数作为第二累积异常阶段参数;
21、从所述即时监测点对应的各个第二北斗定位阶段簇中,将所述第二累积异常阶段参数不小于所述异常定位持续参数的第二北斗定位阶段簇作为第二目标北斗定位阶段簇,将所述第二目标北斗定位阶段簇中各个第一异常定位阶段作为所述即时监测点对应的关键异常定位阶段。
22、在第一方面的一种可能的实施方式中,所述方法还包括:
23、从所述即时监测点对应的基础北斗定位阶段簇中,将所述先验位置偏差不小于调整后偏移参数的第一非异常定位阶段作为候选非异常定位阶段;所述调整后偏移参数是依据所述基础异常定位观测模型中的异常定位更新参数,缩减所述位置偏差参数获得的;
24、从所述即时监测点对应的基础北斗定位阶段簇中,确定在关联的两个第一异常定位阶段之间按照顺序进展的各个候选非异常定位阶段的全局阶段参数作为第二正常阶段参数,在所述第二正常阶段参数不大于包含在所述基础异常定位观测模型的非异常定位持续参数时,将所述第二正常阶段参数对应的各个候选非异常定位阶段转换成第一异常定位阶段,生成第二优化北斗定位阶段集合;
25、在所述即时监测点对应的第二优化北斗定位阶段集合中,获取按照顺序进展的各个第一异常定位阶段构建第三北斗定位阶段簇,确定所述第三北斗定位阶段簇的全局阶段参数作为第三累积异常阶段参数;
26、从所述即时监测点对应的各个第三北斗定位阶段簇中,将所述第三累积异常阶段参数不小于所述异常定位持续参数的第三北斗定位阶段簇作为第三目标北斗定位阶段簇,将所述第三目标北斗定位阶段簇中各个第一异常定位阶段作为所述即时监测点对应的关键异常定位阶段。
27、在第一方面的一种可能的实施方式中,所述对于所述各个监测点中每个监测点,依据所述即时位置偏差,从所述各个北斗定位阶段中筛选出第二异常定位阶段,包括:
28、对于即时监测点,确定各个即时位置偏差各自关联的定位精度标签,生成所述各个北斗定位阶段各自关联的即时定位精度标签,将即时定位精度标签为目标精准性评价标签的北斗定位阶段作为所述即时监测点对应的第二异常定位阶段。
29、在第一方面的一种可能的实施方式中,所述依据所述特定北斗定位分区中存在关键异常定位阶段的监测点对应的信号覆盖区域和关键异常定位阶段,确定所述特定北斗定位分区对应的先验定位效能,包括:
30、对于所述特定北斗定位分区中存在关键异常定位阶段的监测点,确定监测点对应的各个关键异常定位阶段的全局阶段参数作为监测点对应的目标异常定位阶段参数,融合监测点对应的信号覆盖区域和目标异常定位阶段参数,生成监测点对应的先验定位效能;
31、依据所述特定北斗定位分区中各个存在关键异常定位阶段的监测点各自关联的先验定位效能,生成所述特定北斗定位分区对应的先验定位效能。
32、在第一方面的一种可能的实施方式中,所述依据所述特定北斗定位分区中存在第二异常定位阶段的监测点对应的信号覆盖区域和第二异常定位阶段,确定所述特定北斗定位分区对应的即时定位效能,包括:
33、对于所述特定北斗定位分区中同时存在关键异常定位阶段和第二异常定位阶段的监测点,从监测点对应的各个关键异常定位阶段和第二异常定位阶段中确定共享异常定位阶段,确定监测点对应的各个共享异常定位阶段的全局阶段参数作为监测点对应的共享异常定位阶段参数,融合监测点对应的信号覆盖区域和共享异常定位阶段参数,生成监测点对应的即时定位效能;
34、依据所述特定北斗定位分区中各个同时存在关键异常定位阶段和第二异常定位阶段的监测点各自关联的即时定位效能,生成所述特定北斗定位分区对应的即时定位效能;
35、所述依据所述先验定位效能和所述即时定位效能之间的效能偏差,更新所述基础异常定位观测模型,并在所述效能偏差符合设定标准时,生成经过优化的目标异常定位观测模型,包括:
36、对于所述特定北斗定位分区中存在即时定位效能的监测点,依据同一个监测点对应的即时定位效能和先验定位效能之间的效能偏差,分别得到各个监测点对应的效能偏差;
37、对于所述特定北斗定位分区中存在即时定位效能的监测点,依据各个监测点各自关联的效能偏差的平均偏差,生成所述特定北斗定位分区对应的效能偏差;
38、依据所述特定北斗定位分区对应的效能偏差,更新所述基础异常定位观测模型,直至所述特定北斗定位分区对应的效能偏差小于设定偏差值,生成经过优化的目标异常定位观测模型。
39、在第一方面的一种可能的实施方式中,所述方法还包括:
40、依据所述各个监测点在所述各个北斗定位阶段各自关联的即时位置偏差,确定所述各个监测点在所述各个北斗定位阶段各自关联的目标位置偏差;
41、对于所述各个监测点中每个监测点,在依据所述目标位置偏差和所述经过优化的目标异常定位观测模型,从所述各个北斗定位阶段中估计出关键异常定位阶段时,确定监测点为目标异常定位监测点;
42、依据所述目标异常定位监测点和所述目标异常定位监测点对应的关键异常定位阶段,生成所述特定北斗定位分区对应的异常定位提示信息。
43、第二方面,本技术实施例还提供一种北斗定位云服务系统,所述北斗定位云服务系统包括处理器和机器可读存储介质,所述机器可读存储介质中存储有计算机程序,所述计算机程序结合该处理器加载并执行以实现以上第一方面的基于人工智能的北斗定位数据处理方法。
44、依据以上任意方面的技术方案,可以更加精确地估计并处理特定北斗定位分区中的异常定位阶段,首先通过采集各个监测点在不同北斗定位阶段的先验位置偏差和即时位置偏差,可以综合考虑长期和短期的定位数据。随后,利用先验位置偏差和基础异常定位观测模型中的位置偏差参数,筛选出第一异常定位阶段。通过进一步结合异常定位持续参数,确定关键异常定位阶段。同时,依据即时位置偏差筛选出第二异常定位阶段。接着,依据特定北斗定位分区中的信号覆盖区域和关键异常定位阶段,确定该区域的先验定位效能;类似地,依据存在第二异常定位阶段的监测点的信号覆盖区域和阶段,确定即时定位效能。最后,通过比较先验定位效能与即时定位效能之间的效能偏差,本发明能够更新基础异常定位观测模型。当效能偏差符合设定标准时,生成经过优化的目标异常定位观测模型,可用于更精确地估计存在关键异常定位阶段的监测点,从而提升整体定位系统的响应可靠性和准确度。通过这种方式,能够动态适应北斗定位分区内的变化,及时修正和优化异常定位观测机制,以便于后续提高特定区域内的定位效能和北斗定位可靠性。
- 还没有人留言评论。精彩留言会获得点赞!