一种人工智能AR导航定位路线纠偏方法与流程
本发明涉及车辆导航,特别涉及一种人工智能ar导航定位路线纠偏方法。
背景技术:
1、在ar导航技术方面,已有相关专利,比如申请号cn202010242193.7公开了一种ar导航方法及装置,包括:获取车辆的位置定位信息,根据所述位置定位信息,确定所述车辆的当前所处车道;根据所述位置定位信息以及所述车辆的导航路径规划信息,确定标准车道;获取所述车辆的摄像头拍摄的实景图像;在所述实景图像中确定所述当前所处车道,在所述实景图像中确定所述标准车道;在所述实景图像上叠加一条由所述当前所处车道指向所述标准车道的指引箭头,得到ar导航图像,并在所述车辆的显示屏上显示所述ar导航图像。该专利使用ar导航图像对驾驶员进行行车方向指导,更为直观,驾驶员更容易理解ar导航图像所指代的导航意图,从而避免了走错路的情况发生。
2、上述专利其实在实际的操作中还存在以下问题:
3、1、在对ar导航时,往往会反复发生路线错误并调整路线的问题,ar导航定位路线往往会因为定位问题导致难以对车辆当前的行驶位置进行准确的的定位,从而不便于后续对路线进行重新定位和纠偏。
4、2、在对车辆进行定位导航纠偏时,需要结合车辆行驶的数据进行结合分析比较,现有技术下在数据收集时往往会存在异常数据,从而影响分析结果。
技术实现思路
1、本发明的目的在于提供一种人工智能ar导航定位路线纠偏方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种人工智能ar导航定位路线纠偏方法,所述方法包括:
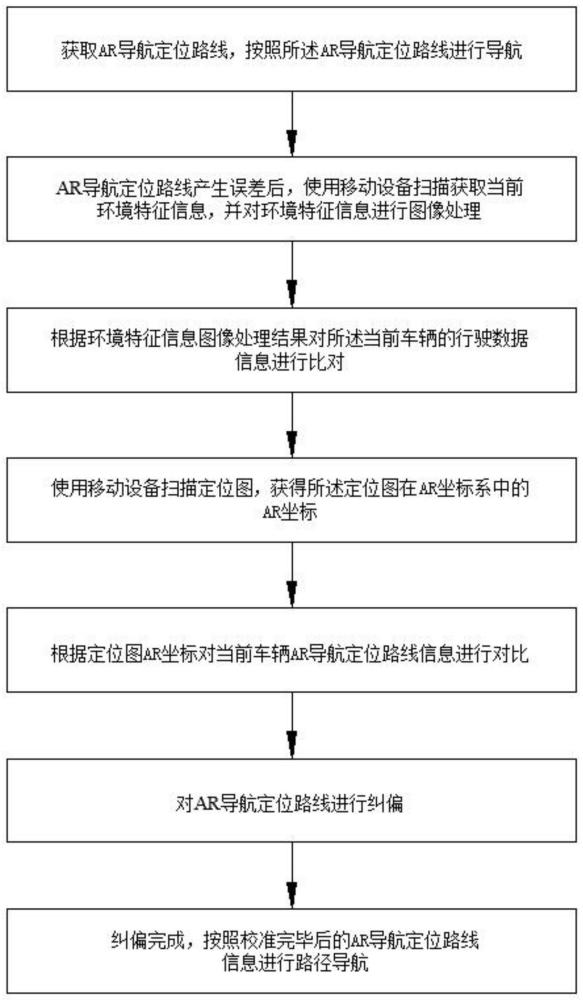
3、获取ar导航定位路线,按照所述ar导航定位路线进行导航;
4、ar导航定位路线产生误差后,使用移动设备扫描获取当前环境特征信息,并对环境特征信息进行图像处理;
5、根据环境特征信息图像处理结果对所述当前车辆的行驶数据信息进行比对;
6、使用移动设备扫描定位图,获得所述定位图在ar坐标系中的ar坐标;
7、根据定位图ar坐标对当前车辆ar导航定位路线信息进行对比;
8、对ar导航定位路线进行纠偏;
9、纠偏完成,按照校准完毕后的ar导航定位路线信息进行路径导航;
10、其中,所述图像处理方法包括:
11、对移动设备扫描获取的环境特征信息图像或视频进行分帧处理,得到若干帧采集图像;
12、将所述采集图像分别输入至主决策程式及副决策程式中,分别输出主标签及副标签,根据所述主标签及所述副标签,确定所述采集图像对应的目标标签;
13、将具有相同目标标签的采集图像进行归类,得到若干个分类集合,对每个分类集合中的每个采集图像进行分割,确定每个采集图像中的关键区域,每个采集图像中包括一个关键区域;
14、对所述关键区域进行特征提取,确定标建筑参照物以及可视文字信息,作为局部特征;基于主成分分析算法进行处理,确定尺度不变特征,作为全局特征;
15、对每个分类集合进行场景分析,确定每个分类集合对应的场景特征,基于决策树算法分别对若干个场景特征进行提取处理,得到若干个设计要点,根据所述若干个设计要点、局部特征以及全局特征对待构建场景进行区域划分,得到区域划分结果;
16、根据所述区域划分结果及预设场景模型确定待构建场景的场景类型,基于深度学习算法和所述场景类型从预设数据库中确定目标数据,根据所述目标数据构建行驶环境场景,输出环境特征信息图像处理结果。
17、进一步的,所述获取ar导航定位路线,按照所述ar导航定位路线进行导航的步骤包括:
18、用户启动ar导航装置及应用程序,根据用户车辆的gprs卫星定位获取用户车辆的定位信息;
19、根据用户车辆的定位信息,获取该定位区域ar地图,使用移动设备扫描获取用户车辆坐标轴朝向,对该定位区域ar地图进行坐标轴朝向翻转调整,调整至与用户车辆相同坐标轴朝向;
20、根据用户定位信息以及预设目的地的定位信息生成ar导航定位路线,按照所述ar导航定位路线进行导航。
21、进一步的,所述ar导航定位路线产生误差后,使用移动设备扫描获取当前环境特征信息,并对环境特征信息进行图像处理的步骤包括:
22、ar导航定位路线产生误差后,利用车辆行车过程中的行车记录仪对街景进行检测获取当前环境特征信息,所述环境特征信息包括环境特征中的中大型可视文字信息及目标建筑参照物;
23、当前环境特征信息进行图像处理,并输出环境特征信息图像处理结果。
24、进一步的,所述根据环境特征信息图像处理结果对所述当前车辆的行驶数据信息进行比对的步骤包括:
25、根据用户车辆的gprs卫星定位获取用户车辆的当前定位信息,将车辆的当前定位信息与环境特征信息图像处理结果进行比对生成第一比对结果;
26、获取当前车辆的行驶数据信息,将用户车辆的当前定位信息与当前车辆的行驶数据信息进行比对生成第二比对结果;
27、将第一比对结果与第二对比结果进行对比,确定当前ar导航定位路线否存在误差及是否具有纠偏需求。
28、进一步的,所述获取当前车辆的行驶数据信息的方法,包括:
29、获取车辆行驶坐标数据与时间数据;
30、获取所述坐标数据的坐标特征和时间数据的时间特征,并基于所述坐标特征和时间特征分别确定所述坐标数据和时间数据的坐标规律和时间规律,从所述述坐标数据提取不满足所述坐标规律的异常坐标数据进行剔除,从所述时间数据提取不满足所述书简规律的异常时间数据进行剔除;
31、按照多个数据整合要求,并基于所述不同的数据整合规则建立动态数据集;
32、整合动态数据集,基于所述动态数据整合指令,对所述校验后坐标数据与时间数据进行动态整合,得到多组整合数据,基于所述多组整合数据生成当前车辆的行驶数据信息。
33、进一步的,所述使用移动设备扫描定位图,获得所述定位图在ar坐标系中的ar坐标的步骤包括:
34、当当前导航位置信息与实际车辆位置信息是否存在误差时,获取当前所在定位区域定位图的ar坐标系,将该ar坐标系放入该定位区域ar地图中进行扫描定位,获得实际ar坐标。
35、进一步的,所述根据定位图ar坐标对当前车辆ar导航定位路线信息进行对比的步骤包括:
36、将所述实际ar坐标放入该定位区域ar地图的坐标系中,将ar导航路径中待校准的即时车辆坐标放入该定位区域ar地图的坐标系中;
37、将所述两个坐标在同一坐标系中进行比对,对定位图ar坐标对当前车辆ar导航路径信息进行对比。
38、进一步的,所述对ar导航定位路线进行纠偏的步骤包括:
39、在确认所述即时车辆坐标存在误差时,利用移动设备的陀螺仪和加速度计进行惯性测距,于该定位区域ar地图中,按照用户车辆行进的移动坐标生成用户车辆的已纠偏定位信息;
40、将所述车辆ar地图中的定位信息替换为已纠偏定位信息。
41、进一步的,所述纠偏完成,按照校准完毕后的ar导航定位路线信息进行路径导航的步骤包括:
42、根据用户已纠偏定位信息以及预设目的地的定位信息生成已纠偏ar导航定位路线,按照所述已纠偏ar导航定位路线进行导航。
43、进一步的,所述移动设备包括真值机、测试机、gps天线、功分器、通讯单元、行车记录仪和电子计算机。
44、与现有技术相比,本发明的有益效果是:
45、1.现有技术下,在对ar导航时,往往会反复发生路线错误并调整路线的问题,ar导航定位路线往往会因为定位问题导致难以对车辆当前的行驶位置进行准确的的定位,从而不便于后续对路线进行重新定位和纠偏,而本发明在车辆行车过程中对街景进行检测获取当前环境特征信息,当前环境特征信息进行图像处理,并输出环境特征信息图像处理结果,准确确定采集图像对应的场景类别的标签,确定关键区域,减少处理范围,提高处理效率,基于局部特征及所述全局特征确定的特征向量,便于准确实现对关键区域进行场景特征确认,提高了对场景特征提取的准确性。基于提取的场景特征,确定目标数据,并构建目标场景,便于提炼出最优的场景信息,提高了抗干扰性能,减少不必要的场景,便于提高对目标场景的传输速率,同时基于目标场景便于快速对车辆行驶当前周边环境特征信息进行识别调取,提高对ar导航定位路线核实速率。
46、2.现有技术下,在对车辆进行定位导航纠偏时,需要结合车辆行驶的数据进行结合分析比较,现有技术下在数据收集时往往会存在异常数据,从而影响分析结果,而本发明将用户车辆的当前定位信息与当前车辆的行驶数据信息进行,对采集到的坐标数据与时间数据进行标准化,提高对数据的分析计算能力和效率,通过对标准化后的数据进行校验,剔除异常的数据,为数据之间的匹配提供准确的数据基础,通过对校验后的数据按照预先确定的多个数据整合要求进行多次不同的整合,得到多组整合数据,最终生成数据集,保证了数据集中整合数据的整合方式的多样性,从而保证后续依赖所述数据集提取数据进行数据分析的效率和准确性,最终,保证对车辆的行驶数据信息的时效性,提高对ar导航定位路线的监测效果和监测质量。
- 还没有人留言评论。精彩留言会获得点赞!