基于序列配准的探地雷达定位方法、装置及计算机设备
本技术涉及雷达定位,特别是涉及一种基于序列配准的探地雷达定位方法、装置及计算设备。
背景技术:
1、探地雷达定位导航技术是弥补基于光学相机、激光雷达定位方案缺陷的有效方案。该技术目前逐渐受到人们的广泛关注。凭借地下场景比地上场景更不易改变的优势,该技术有望成为未来在各种极端恶劣的动态环境下定位的有效解决方案。当前利用探地雷达进行机器人定位的方案是基于一张先验地图,并通过特征匹配的方案进行机器人重定位。
2、然而,目前该方案还存在许多问题,一方面,受限于探地雷达的观测范围小,实时采集的数据在地图中存在大量的假阳性候选匹配,序列信息的匹配在过去机器人定位研究当中有效地增加了机器人的感知范围,提升了机器人系统定位的稳健性;但是另一方面,雨雪天气造成的地下含水量变化。这依然对该技术想要实现自主定位带来了极大的挑战
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够实现在各种天气条件下进行稳定匹配的适应多天气数据的基于序列配准的探地雷达定位方法、装置及计算设备。
2、一种基于序列配准的探地雷达定位方法,所述方法包括:
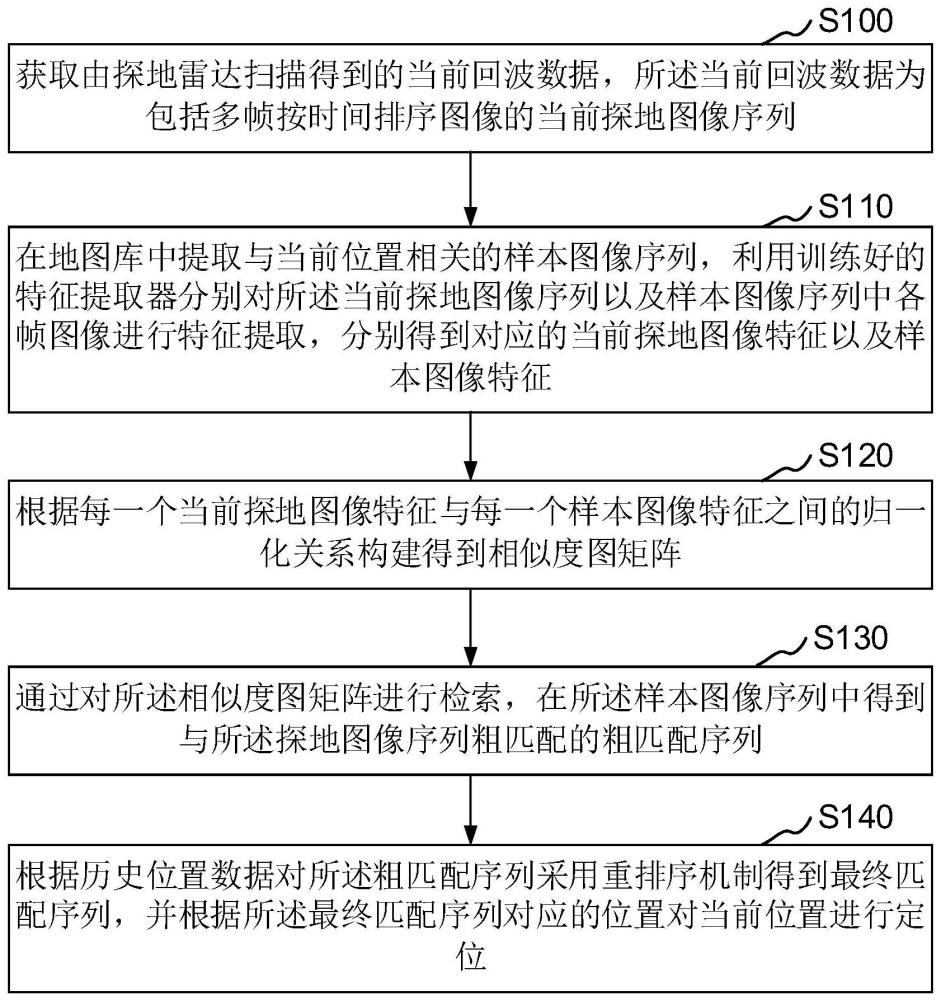
3、获取由探地雷达扫描得到的当前回波数据,所述当前回波数据为包括多帧按时间排序图像的当前探地图像序列;
4、在地图库中提取与当前位置相关的样本图像序列,利用训练好的特征提取器分别对所述当前探地图像序列以及样本图像序列中各帧图像进行特征提取,分别得到对应的当前探地图像特征以及样本图像特征;
5、根据每一个当前探地图像特征与每一个样本图像特征之间的归一化关系构建得到相似度图矩阵;
6、通过对所述相似度图矩阵进行检索,在所述样本图像序列中得到与所述探地图像序列粗匹配的粗匹配序列;
7、根据历史位置数据对所述粗匹配序列采用重排序机制得到最终匹配序列,并根据所述最终匹配序列对应的位置对当前位置进行定位。
8、在其中一实施例中,通过对深度孪生网络进行模板匹配的训练,将训练好的深度神经网络中的特征提取层拆分出来作为所述训练好的特征提取器。
9、在其中一实施例中,训练所述深度孪生网络包括:
10、获取由探地雷达在同一移动路线,不同时间扫描得到的多帧模板图像以及多帧搜索图像;
11、将对应同一位置坐标的模板图像和搜索图像作为一组训练数据对,相应构建得到的包含多组训练数据对的训练数据集;
12、将所述训练数据集输入至所述深度孪生网络,在所述深度孪生网络中,由特征提取层分别提取一组训练数据对中模板图像和搜索图像的特征编码,再通过互相关层,根据特征编码输出所述模板图像和搜索图像的相似分数图;
13、根据所述深度孪生网络预测得到的相似分数图以及真值图计算logstic损失函数,根据计算结果对所述深度孪生网络中的参数进行调整,直至计算结果收敛,则得到训练好的深度孪生网络。
14、在其中一实施例中,在各组所述训练数据对中,所述模板图像与所述搜索图像的中心位置坐标重合,且所述搜索图像的尺寸大于所述模板图像。
15、在其中一实施例中,所述通过对所述相似度图矩阵进行检索,在所述样本图像序列中得到与所述探地图像序列粗匹配的粗匹配序列包括:
16、根据预设的粗匹配序列长度以及速度搜索范围,在所述相似度图矩阵中计算每个当前探地图像在各样本图像中的积累相似度,并根据所述积累相似度选取最佳匹配序列作为粗匹配序列。
17、在其中一实施例中,计算所述积累相似度采用以下公式:
18、
19、在上式中,t表示探地雷达系统当前的位置索引,t是实时采集的当前探地图像序列索引,d是对应样本图像序列的索引,dl是预设的粗匹配序列长度;
20、其中,通过根据预设的速度搜索范围找到当前探地图像序列索引t对应样本图像序列的索引d:
21、d=m+v(t+dl-t)
22、在上式中,m表示用于计算累积相似度的地图切片索引,v表示轨迹速度。
23、在其中一实施例中,所述根据历史位置数据对所述粗匹配序列采用重排序机制得到最终匹配序列:
24、根据多个连续时刻的历史位置对当前所在位置进行预测,得到当前预测位置;
25、根据所述当前预测位置得到连续性权重,并根据所述连续性权重对所述粗匹配序列中每一帧图像对应的积累相似度进行更新;
26、对更新后的积累相似度进行重排序,根据最高积累相似度对应的样本图像得到所述最终匹配序列。
27、在其中一实施例中,所述连续性权重表示为:
28、
29、在上式中,pi表示第i个粗匹配序列的索引,px表示预测出的当前位置对应的样本图像在样本图像序列中的索引,k和σ表示预设参数。
30、一种基于序列配准的探地雷达定位装置,所述装置包括:
31、实时数据获取模块,用于获取由探地雷达扫描得到的当前回波数据,所述当前回波数据为包括多帧按时间排序图像的当前探地图像序列;
32、图像特征提取模块,用于在地图库中提取与当前位置相关的样本图像序列,利用训练好的特征提取器分别对所述当前探地图像序列以及样本图像序列中各帧图像进行特征提取,分别得到对应的当前探地图像特征以及样本图像特征;
33、相似度图矩阵构建模块,用于根据每一个当前探地图像特征与每一个样本图像特征之间的归一化关系构建得到相似度图矩阵;
34、粗匹配序列得到模块,用于通过对所述相似度图矩阵进行检索,在所述样本图像序列中得到与所述探地图像序列粗匹配的粗匹配序列;
35、当前位置定位模块,用于根据历史位置数据对所述粗匹配序列采用重排序机制得到最终匹配序列,并根据所述最终匹配序列对应的位置对当前位置进行定位。
36、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
37、获取由探地雷达扫描得到的当前回波数据,所述当前回波数据为包括多帧按时间排序图像的当前探地图像序列;
38、在地图库中提取与当前位置相关的样本图像序列,利用训练好的特征提取器分别对所述当前探地图像序列以及样本图像序列中各帧图像进行特征提取,分别得到对应的当前探地图像特征以及样本图像特征;
39、根据每一个当前探地图像特征与每一个样本图像特征之间的归一化关系构建得到相似度图矩阵;
40、通过对所述相似度图矩阵进行检索,在所述样本图像序列中得到与所述探地图像序列粗匹配的粗匹配序列;
41、根据历史位置数据对所述粗匹配序列采用重排序机制得到最终匹配序列,并根据所述最终匹配序列对应的位置对当前位置进行定位。
42、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
43、获取由探地雷达扫描得到的当前回波数据,所述当前回波数据为包括多帧按时间排序图像的当前探地图像序列;
44、在地图库中提取与当前位置相关的样本图像序列,利用训练好的特征提取器分别对所述当前探地图像序列以及样本图像序列中各帧图像进行特征提取,分别得到对应的当前探地图像特征以及样本图像特征;
45、根据每一个当前探地图像特征与每一个样本图像特征之间的归一化关系构建得到相似度图矩阵;
46、通过对所述相似度图矩阵进行检索,在所述样本图像序列中得到与所述探地图像序列粗匹配的粗匹配序列;
47、根据历史位置数据对所述粗匹配序列采用重排序机制得到最终匹配序列,并根据所述最终匹配序列对应的位置对当前位置进行定位。
48、上述基于序列配准的探地雷达定位方法、装置及计算设备,通过利用训练好的特征提取器分别对当前探地图像序列以及样本图像序列中各帧图像进行特征提取,分别得到对应的当前探地图像特征以及样本图像特征,根据当前探地图像特征与样本图像特征之间的归一化关系构建得到相似度图矩阵,通过对该矩阵进行检索,在样本图像序列中得到与探地图像序列粗匹配的粗匹配序列,接着根据历史位置数据对粗匹配序列采用重排序机制得到最终匹配序列,并根据最终匹配序列对应的位置对当前位置进行定位,采用本方法可在各种天气条件下采用探地雷达实现精准定位。
- 还没有人留言评论。精彩留言会获得点赞!