一种回转轴系倾角回转误差的自动检测方法及控制机构与流程
本发明涉及测量,特别是涉及一种回转轴系倾角回转误差的自动检测方法及控制机构。
背景技术:
1、倾角回转误差是指轴系回转过程中回转轴线相对于回转轴线平均线的倾角变化量,目前国内对回转轴系的倾角回转误差的测试方法都是采用gjb 1801-1993中规定的使用光学自准直法或水平仪法来对被测轴的倾角回转误差进行测量,获得倾角回转误差的测量结果,但自动化程度低,且大部分仅适用于可360°回转轴系的倾角回转误差检测。
技术实现思路
1、本发明的目的是为了克服上述背景技术的不足,提供一种回转轴系倾角回转误差的自动检测方法及控制机构,使其解决回转轴系的倾角回转误差检测自动化程度低、检测方法的覆盖范围小的问题,实现了对轴系倾角回转误差的自动化检测,达到了检测结果准确可靠的目的。
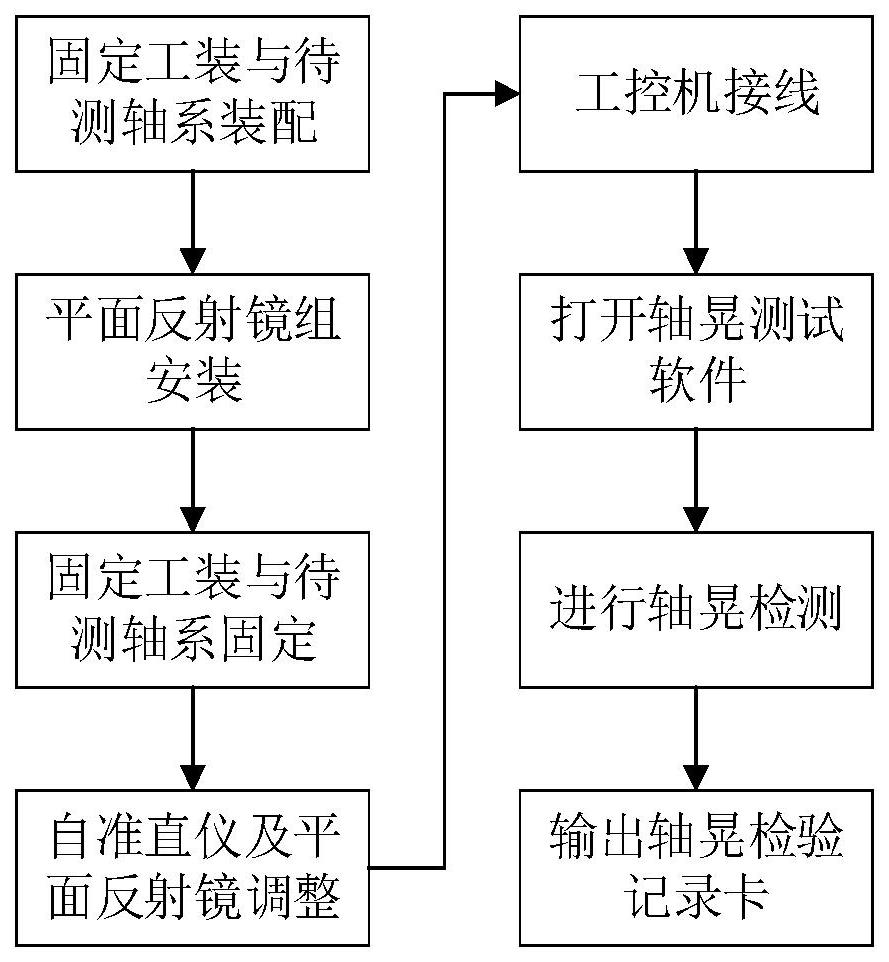
2、本发明提供的一种回转轴系倾角回转误差的自动检测方法,包括如下步骤:步骤一:将待测轴系的定子固定到固定工装上,待测轴系的转子通过联轴器与步进电机的转子相连接;步骤二:将平面反射镜组固定到待测轴系的转子上;步骤三:将固定工装与待测轴系稳固安装于光学平台上,保证待测轴系回转轴线与自准直仪光管轴线粗略对准;步骤四:安装自准直仪到自准直仪安装支架上,调节自准直仪位置与高度使平面反射镜对自准直仪成像,调节平面反射镜镜座并旋转待测轴系的转子,调整平面反射镜镜座使镜面与自准直仪光管轴线垂直;步骤五:将自准直仪测量数据输出端与工控机数据采集端口连接,将步进电机驱控装置的控制线缆连接到工控机上;步骤六:工控机在控制步进电机带动待测轴系转子同步转动的同时,自动采集自准直仪的检测数据,通过傅里叶分析法或最小二乘法对存储的检测数据进行数据处理,输出拟合标准圆轨迹点xy坐标、实际倾角回转误差轨迹点xy坐标以及被测轴的倾角回转误差,进行可360°回转轴系或非360°回转轴系的倾角回转误差检测。
3、在上述技术方案中,所述步骤六中,检测可360°回转轴系的倾角回转误差检测的过程如下:工控机自动控制步进电机按角度m的步距转动s次,同时工控机采集每次转动前自准直仪的检测数据,得到s组自准直仪在x轴方向的读数wxi和在y轴方向的读数wyi,对读数wxi和wyi的数据处理采用傅里叶分析法计算可360°回转轴系的倾角回转误差。
4、在上述技术方案中,所述步骤六中,数据处理步骤的整体过程如下:对于可360°回转轴系,采用傅里叶分析法进行数据处理,将自准直仪x轴方向的读数wxi、y轴方向的读数wyi按泰勒级数展开,然后扣除自准直仪安装误差和平面镜安装误差形成的零次和一次谐波分量即可得到倾角回转误差沿两个方向的分量δwxi和δwyi,合成两分量即为待测轴的倾角回转误差。
5、在上述技术方案中,所述步骤六中,数据处理步骤的具体过程如下:将读数wxi和wyi按泰勒级数展开成傅里叶级数如下:
6、
7、式(1)和(2)中:i为转动次数;k为谐波次数;零次谐波和一次谐波的傅里叶系数为ax0、ay0和ax1、bx1、ay1、by1,其计算公式如下:
8、
9、
10、
11、
12、
13、从读数wxi和wyi中扣除由于自准直仪安装误差和平面镜安装误差引起的零次以及一次谐波分量即可获得倾角回转误差在x轴和y轴的分量δwxi和δwyi:
14、
15、
16、则各测试点的倾角回转误差计算公式为:
17、
18、取各测试点倾角回转误差的均方根值作为最终被测轴的倾角回转误差:
19、在上述技术方案中,所述步骤六中,检测非360°回转轴系的倾角回转误差检测的过程如下:将待测轴系回转轴逆时针旋转到极限位置,工控机控制步进电机按角度n的步距转动t次,同时工控机采集每次转动前自准直仪的检测数据,得到t组自准直仪在x轴方向的读数wxi和在y轴方向的读数wyi,对读数wxi和wyi的数据处理采用最小二乘法计算非360°回转轴系的倾角回转误差。
20、在上述技术方案中,所述步骤六中,数据处理步骤的整体过程如下:对于不可360°回转的被测轴,采用最小二乘法进行数据处理,将得到的所有点的测试数据(wxi,wyi)拟合成一个标准圆,计算出标准圆的半径r和圆心坐标(x0,y0),再计算出各个测试点(wxi,wyi)到(x0,y0)的距离与标准圆半径r的差值即为各个点的倾角回转误差。
21、在上述技术方案中,所述步骤六中,数据处理步骤的具体过程如下:标准圆轨迹可写成如下形式:(wxi-x0)2+(wyi-y0)2=r2(8),为求解出标准圆的圆心坐标和半径,将上式改写为如下形式:
22、αwxi+βwyi+γ=wxi2+wyi2(9),式中,α、β、γ分别为与标准圆的圆心位置坐标和半径有关的量,具体表达式为:
23、
24、
25、通过求解式(10)即可求得标准圆的参数,若试验测试数据量为t组,则将式(10)带入式(9)中并进一步表示为矩阵形式如下:
26、式中:t为检测时步进电机转动次数,式(11)可简写为如下形式:ax=b(12),通常测试数据远大于未知数,因此,当(ata)-1存在时通过最小二乘原理可求得中间变量的向量为:x=(ata)-1atb(13),将式(13)的计算结果带入式(10)中即可求得标准圆的圆心坐标和半径,定义测试数据点(wxi,wyi)到圆心(x0,y0)的距离为ri,其计算公式如下:
27、
28、则各测试点的倾角回转误差计算公式为:
29、δri=ri-r(15),取各测试点倾角回转误差的均方根值作为最终被测轴的倾角回转误差:
30、
31、在上述技术方案中,所述步骤六中,角度m×s次=360度,角度n×t次=最大可回转角度。
32、在上述技术方案中,还包括步骤七,其具体过程如下:保存数据,输出并打印倾角回转误差检测报告。
33、本发明还提供了一种回转轴系倾角回转误差的自动检测控制机构,包括工控机,所述工控机包括如下部分:数据采样单元:通过rs485接口输出控制信号到步进电机驱动控制器,从而控制步进电机带动被测轴转子同步旋转,并通过串行通信协议对每次转动后光电自准直仪的检测数据进行采样、校验,并存储在列表控件中,直至将所需检测数据完全采样存储为止;数据处理单元:通过傅里叶分析法或最小二乘法对存储的可360°回转轴系或非360°回转轴系的检测数据进行数据处理,输出拟合标准圆轨迹点xy坐标、实际倾角回转误差轨迹点xy坐标以及被测轴的倾角回转误差;数据分析与显示单元:接收数据处理单元处理输出的拟合标准圆轨迹点xy坐标、实际倾角回转误差轨迹点xy坐标以及被测轴倾角回转误差等数据,使用画笔工具及相关函数进行可视化显示绘图;数据输出单元:对需要输出的文件进行命名后,对数据采样单元保存在列表控件中的检测值、数据处理单元输出的倾角回转误差进行输出。
34、本发明回转轴系倾角回转误差的自动检测方法及控制机构,具有以下有益效果:
35、本发明通过傅里叶分析法实现了对360°回转轴系的倾角回转误差的自动化检测,通过最小二乘法实现了对非360°回转轴系的倾角回转误差的自动化检测,扩展了倾角回转误差检测方法的适用范围,有效降低了人为操作失误导致检测数据出错的可能性,有效提高了轴系倾角回转误差的检测效率。
- 还没有人留言评论。精彩留言会获得点赞!