基于弧形阵列天线的地基ATI-SAR水面流速测量方法
本发明属于干涉合成孔径雷达(interferometric synthetic aperture radar,简称sar),具体涉及基于弧形阵列天线的地基ati-sar水面流速测量方法。
背景技术:
1、合成孔径雷达(synthetic aperture radar, sar)作为主动式微波传感器,能够向目标区域发射信号并接收由目标散射返回的相干信号,能够获取被观测目标的位置、运动特性和散射特性等特征。沿航迹干涉合成孔径雷达(along-track interferometricsynthetic aperture radar, insar)技术由sar技术发展而来,能够获取目标的速度信息。
2、如图1所示为顺轨干涉sar测量径向水面流速的示意图,ati-sar通过两天线对于水面场景在时间基线间隔前后照射同一块水面区域,因为水面存在运动导致前后天线到水面目标的斜距不同所以能够进行干涉处理。因为前后天线斜距差由水面速度在雷达视线方向引起,所以ati-sar能够对水面速度的径向分量进行测量。
3、ati-sar前后天线接收信号成像时间间隔为,为平台速度,为顺轨基线,则两幅天线回波经过成像后的相位分别为,。所以径向反演速度能够表示为
4、(1)
5、其中,为电磁波波长,多视数,为斜距。
6、ati-sar只能测量水面的一维流速,所以学者们提出了采用斜视双波束ati-sar测量两个雷达视线方向上的水面速度分量,进行矢量合成之后即能够实现水面二维流速的测量。如图2中所示,x轴表示平台运动方向,z轴表示从地心指向平台向上,y轴根据右手螺旋守则确定,反演流场矢量沿x轴与y轴进行分解。
7、由图2能够知道,前后波束分别构成一个顺轨干涉系统,下标、表示前后波束,对于前后波束径向方向流场速度分量进行测量:
8、(2)
9、设置前后波束的入射角分别为、,前后波束在xoy平面投影与y轴的夹角分别为、,则反演二维流场速度为
10、(3)
11、迄今为止,国内外还没有针对水面流速进行业务化产品生产的卫星型号,各国虽然都开始了针对二维流速测量的卫星平台研究但短期内还无法填补此项空白。更重要的是,卫星平台的重访周期较长,无法实现对于某水域地区进行长期、持续化的流速监测。
技术实现思路
1、针对现有技术中存在的无法实现对于某水域地区进行长期、持续化的流速监测等现状,本发明提供了基于弧形阵列天线的地基ati-sar水面流速测量方法,通过在地面设置两组弧形阵列雷达天线,每组内有两部阵列雷达天线,其中一部发射线性调频信号、两部天线同时接收水面反射回波形成顺轨干涉;两个天线组分别测量雷达视线方向上的流速分量,再进行矢量合成,从而实现水面流速矢量的测量。
2、本发明通过如下技术方案实现:
3、基于弧形阵列天线的地基ati-sar水面流速测量方法,具体包括如下步骤:
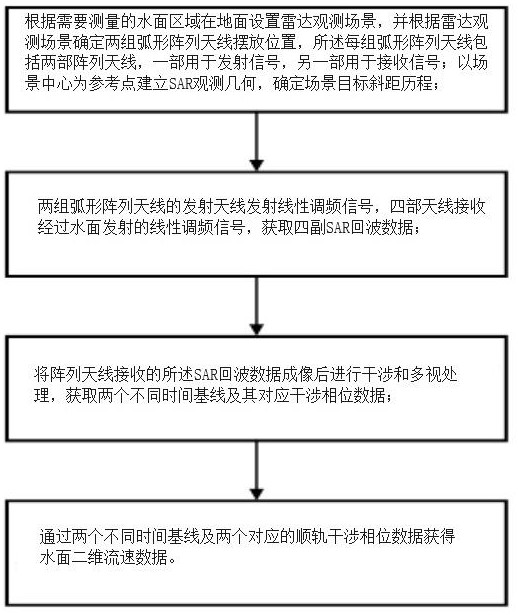
4、步骤一:根据需要测量的水面区域在地面设置雷达观测场景,并根据雷达观测场景确定两组弧形阵列天线摆放位置,所述每组弧形阵列天线包括两部阵列天线,一部用于发射信号,另一部用于接收信号;以场景中心为参考点建立sar观测几何,确定场景目标斜距历程;
5、步骤二:两组弧形阵列天线的发射天线发射线性调频信号,四部天线接收经过水面发射的线性调频信号,获取四副sar回波数据;
6、步骤三:将阵列天线接收的所述sar回波数据成像后进行干涉和多视处理,获取两个不同时间基线及其对应干涉相位数据;
7、步骤四:通过两个不同时间基线及两个对应的顺轨干涉相位数据获得水面二维流速数据。
8、进一步地,步骤一具体包括如下内容:
9、s11、根据需要测量的水面区域设置观测场景,在观测场景沿岸边平行设置一组弧形阵列天线,以发射天线圆弧原点在地面投影为原点,与岸边平行方向为y轴,z轴从地心指向原点,x轴则通过右手螺旋定则确定,建立坐标系;另一组弧形阵列天线按同样方法建立坐标系;
10、s12、两组弧形阵列天线布置完成后测量天线坐标,以场景中心为参考点建立sar观测几何;
11、s13、根据sar观测几何,确定信号斜距历程。
12、进一步地,步骤s11中,所述两组弧形阵列天线之间具有一定间隔。
13、进一步地,步骤s13中,所述根据sar观测几何,确定信号斜距历程,具体包括如下内容:
14、弧形阵列天线组内的发射天线与接收天线到目标的斜距历程分别为
15、(4)
16、
17、(5)
18、 (6)
19、其中,、、分别表示弧形阵列天线上的等效相位点的角度、天线半径和高度;、、分别为观测目标的角度、目标到场景中心距离和目标高度,为发射天线与接收天线的间隔、表示波束指向角变化率、为快时间。
20、进一步地,步骤二中,设定雷达波门开启时间为:
21、 (7)
22、设定雷达波门关闭时间为
23、(8)
24、为光速,为sar系统最远斜距;弧形阵列天线组内的两部发射天线发射线性调频信号,两部接收天线进行接收。
25、进一步地,步骤三中,将步骤一得到的弧形阵列天线组内的发射天线与接收天线到目标的斜距历程在处做泰勒展开得到:
26、(9)
27、 (10)
28、为电磁波波长,从而,发射天线与接收天线的信号多普勒历程表示为
29、(11)
30、(12)
31、设、,则时间基线为
32、(13)
33、根据上式能够看出,位于场景内不同位置的目标点时间基线不同。
34、进一步地,步骤四中,具体包括如下内容:
35、设、与、为两组弧形阵列天线坐标分别放置照射场景边缘,为场景中的目标;若场景不存在洋流运动即为平地,此时、接收信号多普勒历程相同,成像时刻均为0时刻,此时、接收机成像后的干涉相位表示为
36、(14)
37、同理,、接收机成像后的干涉相位表示为
38、(15)
39、所以,两组ati接收机存在固有干涉相位,且不同位置干涉相位不同,沿方位向、距离向二维空变;
40、当场景为水面时,、弧形阵列天线信号成像时间存在的时间差,在处接收质点返回的回波,在处接收质点反射的回波;所以、干涉相位由目标点到接收天线斜距差与水流速度引起的相位组成;
41、目标点到波束矢量在场景的投影矢量为,速度矢量与轴、的夹角分别为、,发射、信号反射波束的入射角与反射角分别为与;忽略固定相位差,干涉相位表示为
42、(16)
43、其中,、分别为速度在轴、上的投影;
44、 (17)
45、同理,的夹角分别为、,发射、信号反射波束的入射角与反射角分别为与,为时间差;
46、、阵列天线信号干涉相位表示为
47、(18)
48、 (19)
49、(20)
50、水面速度沿第一组弧形阵列天线轴、轴分解为、,沿第二组弧形阵列天线轴、轴分解为、;两组坐标系的xoy平面平行但坐标轴交叉,设置两组坐标系夹角为α,则
51、(21)
52、设与第一弧形阵列天线组建立坐标系的y轴夹角为、与第二弧形阵列天线组建立坐标系的y轴夹角为,则
53、(22)
54、联立式(16)、(18)、(21)、(22)即能够解出水面二维流速矢量。
55、与现有技术相比,本发明的优点如下:
56、本发明的基于弧形阵列天线的地基ati-sar水面流速测量方法,由常规ati-sar技术进一步演化而来,相较于水流计与高频雷达,大大提高了水面流速测量产品的分辨率与精度;采用阵列雷达作为发射接收装置,不受天气影响、无需接触水面,能够在任意环境下提供高时间分辨率水面流速数据。
- 还没有人留言评论。精彩留言会获得点赞!