四元数面光场的车轮定位参数检测系统标定方法与系统
本发明涉及一种汽车检测领域的测量设备的标定方法与标定设备,更具体的说,它是一种四元数面光场的车轮定位参数检测系统标定方法与系统。
背景技术:
1、汽车检测是汽车通过性及行驶安全性检测的重要研究内容之一,而视觉检测由于具有非接触、成本低、精度高等优点近年来已经逐渐成为了提高汽车检测的效率和精度的关键技术。利用机器视觉可以实现汽车车轮定位参数检测、汽车轴距差检测、汽车形貌检测、多轴车轴偏角检测、车型识别检测、超载检测等。现有技术中的多rgb-d相机标定法主要有利用相机获取的具有较大重叠部分的点云进行同名特征点匹配获得两相机之间的位姿关系;或利用球、立方体、平面、人体关节长度约束等标定物标定两相机或多个相机之间的位置关系,这些标定系统要求相机之间具有较大的公共视场且相机之间的距离较小。受限于rgb-d相机远距离获取的点云精度不高,难以从点云中提取同名特征点精确匹配,从而导致点匹配所得的两rgb-d相机之间的位姿关系准确度难以得到保证。相较而言,面激光器设备轻便且操作灵活,远距离投射出的激光平面不易发散,因此基于激光平面法向量匹配的两rgb-d相机标定算法通常可具备较高的精度。因此提出了一种四元数面光场的车轮定位参数检测系统标定方法与系统,采用独立相机、面激光器、无纹理靶标板标定了基于全局光场网络的车身基准汽车车轮定位参数检测系统中的多个远距离相机。将三维激光平面作为两个相机的桥梁,利用四元数求解两相机之间的位姿,即可实现车轮定位参数检测系统的各相机坐标系统一。
技术实现思路
1、本发明针对在汽车车轮定位参数检测过程中,对多个rgb-d相机之间进行全局标定的问题,提出了一种设备轻便、操作灵活、结构简单、且具备高精度的全局面光场的汽车车轮定位参数检测系统标定方法。检测系统为三个呈三角分布的rgb-d相机构成的大范围的检测场,通过三维激光平面和无纹理靶标板作为两个相机的桥梁,对系统中三个rgb-d相机之间的位姿关系进行标定,利用四元数求解两相机之间的位姿,实现了车轮定位参数检测系统的各相机坐标系统一。
2、结合说明书附图,本发明采用如下技术方案予以实现:
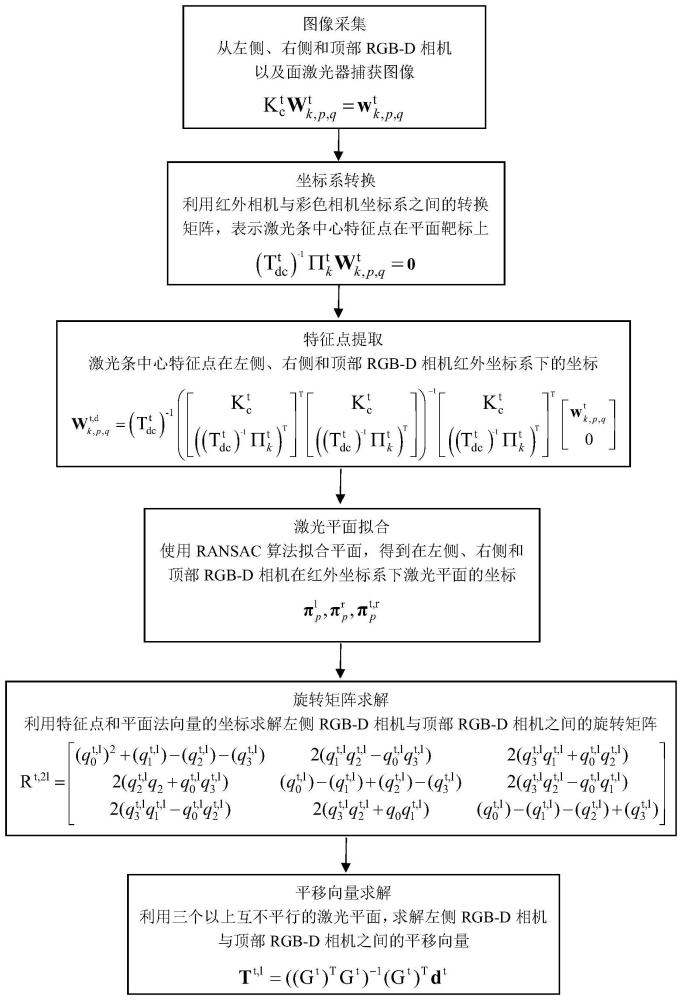
3、四元数面光场的车轮定位参数检测系统标定方法的具体步骤如下:
4、第一步:四元数面光场的车轮定位参数检测系统标定方法的图像采集:
5、将左侧摄像机支架、右侧摄像机支架和龙门架放置在地面上,左侧rgb-d相机和右侧rgb-d相机分别固定左侧摄像机支架、右侧摄像机支架上,顶部rgb-d相机固定在龙门架上,左侧rgb-d相机和右侧rgb-d相机无公共视场,面激光器放置在地面上,打开面激光器,将无纹理靶标板移入左侧rgb-d相机和顶部rgb-d相机视场范围内,左侧rgb-d相机和顶部rgb-d相机采集多张面激光器发出的激光平面与无纹理靶标板表面相交的投影激光线的图像;再将无纹理靶标板移入右侧rgb-d相机和顶部rgb-d相机视场范围内,右侧rgb-d相机和顶部rgb-d相机采集多张面激光器发出的激光平面与无纹理靶标板表面相交的投影激光线的图像,关闭所有面激光器;
6、第二步:四元数面光场的车轮定位参数检测系统标定方法的面光场求解:
7、以右侧rgb-d相机和顶部rgb-d相机之间的位置关系标定为例,首先拟合无纹理靶标板的三维点云,得到在顶部rgb-d相机中红外相机坐标系中的三维平面坐标k表示将无纹理靶标板置于顶部rgb-d相机视场内第k个位置,根据顶部rgb-d相机采集第k幅激光平面与无纹理靶标板表面相交的投影激光线的彩色图像,提取平面靶标与面激光器发出的激光平面相交而成的激光条中心特征点的彩色图像坐标p表示第p(p=1,2…p)个激光平面,q表示无纹理靶标板上的第p条激光光条上的第q(q=1,2…q)个特征点,激光条中心特征点在顶部rgb-d相机中的彩色相机坐标系下的坐标为根据顶部rgb-d相机的彩色相机坐标系与其投影图像坐标系的投影关系可得
8、
9、其中为顶部rgb-d相机中彩色相机的内参数,由上式可得根据激光条中心特征点在平面靶标上可得
10、
11、其中为顶部rgb-d相机中红外相机与彩色相机坐标系之间的转换矩阵;
12、根据顶部rgb-d相机中彩色相机的内参数顶部rgb-d相机中红外相机与彩色相机坐标系之间的转换矩阵无纹理靶标板的三维点云平面在顶部rgb-d相机中红外相机坐标系中的三维平面坐标可得激光条中心特征点在顶部rgb-d相机红外坐标系下的坐标为
13、
14、将上述求得激光条中心特征点在顶部rgb-d相机红外坐标系下的坐标利用ransac算法拟合成一个平面,得到在顶部rgb-d相机红外坐标系下激光平面的坐标
15、面激光器始终保持在同一个位置,将平面靶标移入右侧rgb-d相机视场内,根据右侧rgb-d相机中彩色相机的内参数右侧rgb-d相机中红外相机与彩色相机坐标系之间的转换矩阵无纹理靶标板的三维点云平面在顶部rgb-d相机中红外相机坐标系中的三维平面坐标可获取激光条中心特征点在右侧rgb-d相机红外坐标系下的坐标
16、
17、将上述求得激光条中心特征点在顶部rgb-d相机红外坐标系下的坐标利用ransac算法拟合成一个平面,得到在右侧rgb-d相机的红外相机坐标系下坐标系下激光平面的坐标
18、最后,将面激光器放置于顶部rgb-d相机与左侧rgb-d相机之间,同理可获取在顶部rgb-d相机红外坐标系下激光平面的坐标以及在左侧rgb-d相机红外坐标系下激光平面的坐标
19、第三步:四元数面光场的车轮定位参数检测系统标定方法的转换矩阵求解:
20、以顶部rgb-d相机和左侧rgb-d相机之间的位置关系标定为例,根据第二步获得的在顶部rgb-d相机红外坐标系下激光平面的坐标以及在左侧rgb-d相机红外坐标系下激光平面的坐标检测系统中顶部rgb-d相机坐标系与左侧rgb-d相机坐标系中的激光平面法向量的虚四元数分别表示为左侧rgb-d相机到顶部rgb-d相机坐标系之间的旋转关系的单位四元数表示为两平面的旋转关系可表示为
21、
22、根据左侧rgb-d相机获取的平面法向量经过旋转后应与顶部rgb-d相机获取的平面法向量方向相同,建立目标函数来求解qt,l为
23、
24、其中,p为激光平面的总对数;
25、根据上式求解汽车车身基准的车轮定位参数检测系统左侧rgb-d相机与顶部rgb-d相机坐标系之间的旋转四元数为
26、根据第二步获得的在左侧rgb-d相机红外坐标系下激光平面的坐标以及在顶部rgb-d相机红外坐标系下激光平面的坐标取在检测系统的内的一特征点,其三维坐标为取在检测系统的内的一特征点,其三维坐标为根据点与面的坐标系转换的性质有
27、
28、
29、其中为检测系统左侧rgb-d相机坐标系中的激光平面的法向量参数为检测系统顶部rgb-d相机坐标系中的激光平面的法向量参数左侧rgb-d相机到顶部rgb-d相机坐标系之间的平移向量tt,l,rt,2l为旋转矩阵可由求解的四元数表示为
30、
31、根据上述得到的特征点在顶部rgb-d相机红外坐标系下激光平面的坐标上可得
32、gttt,l=dt
33、其中
34、利用上式和三组以上互不平行激光平面,即可解算出左侧rgb-d相机到顶部rgb-d相机坐标系之间的平移向量tt,l,当激光平面大于三组时,由下式利用svd分解解算左侧rgb-d相机到顶部rgb-d相机坐标系之间的平移向量
35、tt,l=((gt)tgt)-1(gt)tdt
36、同理,将面激光器放置于顶部rgb-d相机与右侧rgb-d相机之间,可求得顶部rgb-d相机与右侧rgb-d相机之间的旋转四元数qt,r以及平移向量tt,r。
37、四元数面光场的车轮定位参数检测系统的标定系统包括有顶部rgb-d相机1、右侧rgb-d相机2、右侧摄像机支架3、面激光器4、面激光器支架5、无纹理靶标板6、靶标板支架7、左侧摄像机支架8、左侧rgb-d相机9与龙门架10。
38、左侧摄像机支架8、右侧摄像机支架3、面激光器支架5、靶标板支架7与龙门架10放置在地面上,左侧rgb-d相机9与右侧rgb-d相机2通过底部的螺纹孔分别与左侧摄像机支架与8右侧摄像机支架3顶部的螺栓螺纹固定连接,左侧rgb-d相机9和右侧rgb-d相机2无公共视场,面激光器4与面激光器支架5顶部的螺栓螺纹固定连接,无纹理靶标板6底部的连接轴与靶标板支架7顶部的螺孔螺纹固定连接,顶部rgb-d相机1通过底部的螺纹孔与龙门架10横梁的螺栓螺纹固定连接。
39、本发明的有益效果是:
40、(1)本发明的方法针对无公共视场相机全局标定问题,采用独立相机、面激光器、无纹理靶标板对多个rgb-d相机进行全局标定,实现了多个rgb-d相机点云点数据的有效融合,满足了多个车轮之间的定位参数等远距离被测物体的位置测量需求。
41、(2)本发明的方法所提出的两rgb-d相机坐标系统一的方法可以推广到多个rgb-d的坐标系统一研究中,因此对车辆的车轮定位、车轮定位参数、轴距差、形貌重建等相关领域的研究具有重要的研究价值。
42、(3)本发明的方法引入面激光作为rgb-d相机之间的桥梁,由于激光平面可以实现远距离传播,投射出的激光平面不易发散,因此该方法基于激光平面法向量匹配的两rgb-d相机标定算法具备较高的精度。
43、(4)本发明的方法提出的一种利用四元数求解两相机之间的位姿,这种描述旋转的方式既避免了旋转向量欧拉角表示法中的奇异性问题,又不会由于用三维正交矩阵表示旋转而导致自由度冗余。因此采用四元数来描述两rgb-d相机坐标系之间的旋转变换,适合描述两rgb-d相机坐标系大角度旋转,即可实现检测系统坐标系的统一。
44、(5)本发明的标定系统标定范围广、性能可靠、装置结构简单、操作简便、成本低,克服现有技术中多rgb-d相机标定法相机之间需要大型固定接触式标定设备的缺点。
- 还没有人留言评论。精彩留言会获得点赞!