一种基于单个磁传感器对永磁体的实时定位方法
本发明属于磁传感,特别是基于磁传感的定位技术,具体为一种基于单个磁传感器对永磁体的实时定位方法。
背景技术:
1、常见的关于位置和距离的实时测量方法包括基于磁场、超声、微波以及激光反射的测距。在这些方法中往往存在一些局限性:超声测距依赖于空气介质,不适合航天太空应用;微波测距受到系统复杂性制约,难于实现小型化;激光测距,具有一定的优势,但通常仅限于无遮挡的直线距离探测,难于获取姿态信息等多自由度的参数。
2、相比于以上方法,基于磁场探测的传感定位具有重量轻、体积小、低功耗等特点,已在国民经济、国防建设、科学技术、医疗卫生等领域都发挥着重要作用,成为现代传感器产业的一个主要分支。特别是在工业应用中,磁性传感器因为其独特的抗灰尘、污垢、油脂、振动和湿度的能力而更加耐用,能在更苛刻的工作环境中使用,而常用的非接触式位置传感器在这些工作环境下通常会失效。
3、在磁传感定位领域内,现有的定位技术大部分是以磁偶极子理论为基础,由磁传感器阵列通过特定的算法对被测物体进行定位。传感器阵列所应用的算法较为复杂,且占用空间体积较大,成本较高,不适用于一些特定的场景,不易于工程化应用。
技术实现思路
1、针对上述存在的问题或不足,为解决现有磁传感定位技术复杂、占用空间较大、成本较高导致应用受限的问题,本发明提供了一种基于单个磁传感器对永磁体的实时定位方法,解决了在更多应用场景下的定位需求。
2、一种基于单个磁传感器对永磁体的实时定位方法,包括:
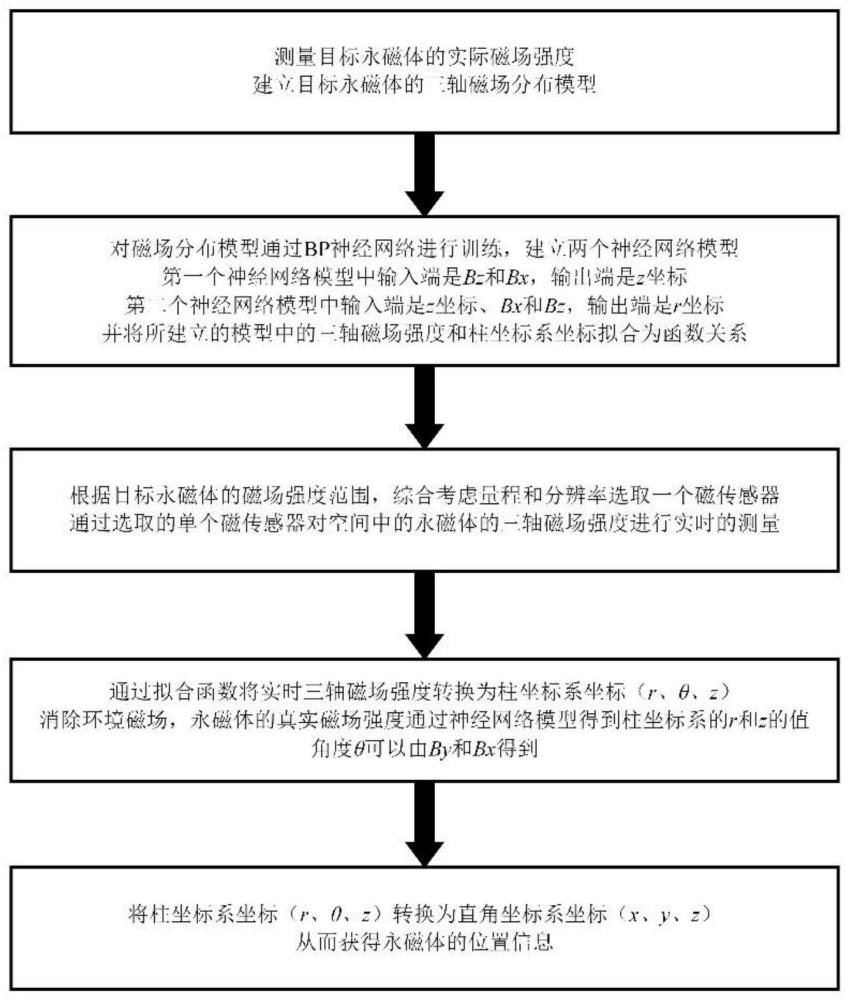
3、步骤1、测量目标永磁体的实际磁场强度,建立目标永磁体的三轴磁场分布模型。
4、步骤2、对步骤1所建立的磁场分布模型通过bp神经网络进行训练,建立两个神经网络模型:第一个神经网络模型中输入端是z轴磁场强度bz和x轴磁场强度bx,输出端是z坐标;第二个神经网络模型中输入端是z坐标、bx和bz,输出端是r坐标;并将步骤1中所建立的模型中的三轴磁场强度和柱坐标系坐标拟合为函数关系。
5、步骤3、根据目标永磁体的磁场强度范围,综合考虑量程和分辨率选取一个磁传感器;通过选取的单个磁传感器对空间中的永磁体的三轴磁场强度进行实时的测量。
6、步骤4、通过步骤2所得的拟合函数将步骤3所得的实时三轴磁场强度转换为柱坐标系坐标(r、θ、z)。
7、消除环境磁场,永磁体的真实磁场强度通过神经网络模型得到柱坐标系的r和z的值,角度θ可以由y轴磁场强度by和x轴磁场强度bx得到。
8、步骤5、将步骤4所得柱坐标系坐标(r、θ、z)转换为直角坐标系坐标(x、y、z),从而获得永磁体的位置信息。
9、进一步的,所述步骤1具体为:
10、首先,对目标永磁体使用专业磁场测量仪器(如高斯计)进行实际磁场强度的测量。然后,通过选择合适的仿真模型(如磁化模型、有限元分析模型、磁滞回线模型等),对目标永磁体进行仿真建模。在仿真过程中,通过调节相应的参数,使得永磁体的三轴磁场强度分布模型与实际磁场强度分布一致,以满足定位系统的性能要求。
11、进一步的,所述步骤1中,根据应用场景和定位需求的实际情况,目标永磁体选择不同规格、尺寸的永磁体,如圆柱体、立方体或球体;其中,圆柱型永磁体的磁场分布均匀,有助于提高测量的稳定性;立方体永磁体的磁场在特定方向上更强,适用于定向性要求较高的应用场景;球型永磁体能够提供全方向的磁场分布,适用于高灵敏度的应用场景。
12、进一步的,所述步骤2中通过bp神经网络将磁场强度信息转换为柱坐标系坐标信息。bp神经网络,又被称为反向传播神经网络,是当今人工智能领域内最为广泛采用的智能算法之一。它由多层神经元构成,包括输入层、隐藏层和输出层,为人工神经网络的代表之一。这三层神经元所起的作用各不相同,输入信息按输入层-隐藏层-输出层顺序进行传输。如果网络的输出结果与实际预期的输出结果存在差异,就会计算这两者之间的偏差,并将此偏差进行反向传播。通过调整神经元的权重和阈值,系统寻求最小化偏差。当输出偏差达到预期水平时,系统停止网络计算,并记录各个神经元的权重,从而形成bp网络模型。
13、其中输入层和隐藏层神经元区间的网络权数记为m1,隐藏层和输出层神经元区间的网络权数记为m2,表达式分别为:
14、
15、
16、其中,l表示矩阵的行数;k表示矩阵的列数;表示m1中第l行第k列位置的元素;表示m2第l行第k列位置的元素。
17、bp神经网络的主要核心在于其反向传播机制,这一机制是通过调整神经元之间的权值和阈值,逐渐使网络输出趋近于预期结果,从而实现了训练和学习的过程。
18、由于bz、bx和z坐标,z、bx、bz和r坐标有很强的相关性,第一个bp神经网络模型中输入端是bz、bx,输出端是z坐标;第二个神经网络模型中输入端是z、bx、bz,输出端是r坐标。
19、两个神经网络模型经过训练达到最佳效果后,得到的拟合函数分别为:
20、
21、在完成网络训练后,利用未使用的样本数据进行测试以评估网络模型的准确性;并通过调整神经元的权重和阈值,使神经网络模型的准确率达到90%以上。
22、进一步的,所述步骤3中,量程是磁传感器能够测量的最大磁场强度范围;分辨率是传感器能够分辨的最小磁场变化。不同尺寸的永磁体可能产生不同强度的磁场,因此需要选择一个其量程能够涵盖所需测量的磁场范围的磁传感器,同时其分辨率需满足测量时对磁场变化的敏感性要求。
23、进一步的,所述步骤3选用的磁传感器为霍尔效应传感器、各向异性磁阻传感器、巨磁阻传感器或隧道磁阻传感器。其中,霍尔效应传感器的响应速度快、功耗低、可靠性高,但是精度较低、性能易受到温度的影响;各向异性磁阻传感器具有高灵敏度,能够检测微小磁场的变化、精度较高,由于各向异性的特性,可能对于特定的方向更为敏感;巨磁阻传感器和隧道磁阻传感器具有高灵敏度和较低的功耗,但是巨磁阻传感器易受外界磁场的干扰、价格相对较高;隧道磁阻传感器其制造较为复杂,导致成本较高、传感器性能会受到温度变化的影响。
24、进一步的,所述步骤4中,真实磁场强度和环境磁场强度的关系为:
25、
26、其中,bx、by和bz为永磁体真实磁场强度;bx1、by1和bz1为磁传感器所测量的磁场强度;bx0、by0和bz0为环境磁场强度,为磁传感器输出第一组的数据,即没有永磁体时的磁传感器输出的磁场强度值。
27、真实磁场强度和柱坐标系坐标r、θ、z关系如下:
28、
29、进一步的,所述步骤5中,柱坐标系坐标和直角坐标系坐标转换关系如下:
30、
31、综上所述,本发明通过bp神经网络所建立的拟合函数,利用单个磁传感器对目标永磁体进行实时磁场测量,将目标永磁体的三轴磁场信息转换为坐标信息,实现了对永磁体的实时跟踪定位。本发明操作简单、占用空间体积较小、成本较低、能够通过磁传感器实时监测目标永磁体的三轴磁场强度信息,即时更新位置信息、定位结果准确,同时根据应用场景和需求的不同,目标永磁体可以选择不同规格、尺寸的永磁体,包括但不限于圆柱体、长方体、球体等;针对所选择的特定的规格、尺寸的永磁体的磁场强度信息,综合考虑量程和分辨率等参数选择合适种类、型号的磁传感器,以达到理想的定位范围和精度。
- 还没有人留言评论。精彩留言会获得点赞!