一种压缩感知雷达超分辨成像方法、系统及设备
本发明涉及遥感成像,特别涉及一种压缩感知雷达超分辨成像方法、系统及设备。
背景技术:
1、针对sar(synthetic aperture radar,合成孔径雷达)成像不断发展的需求,因高分宽幅实现方法的多样和难度,一直是研究人员研究的热点问题。随着压缩感知(compressed sensing,cs)理论的发展,在观测矩阵满足约束等距性(restrictedisometry property,rip)的条件下,基于信号的稀疏性可以从一种远少于nyquist采样样本的非均匀sub-nyquist采样方式中恢复信号。基于此理论,提出一种新体制压缩感知雷达,例如agilesar,空时伪随机调制sar。在非线性迭代优化算法保证空间高分辨率的情况下,压缩感知雷达通过灵巧的波束指向设计,能够实现对场景的超广域观测。压缩感知雷达能够将幅宽/分辨率比提高到与多通道sar(simo-sar)、多输入多输出sar(mimo-sar)体制相同数量级上,且基于sub-nyquist采样的压缩感知雷达系统结构简单、天线尺寸小、数据量小,减轻了信号存储和传输的压力,是一条非常具有吸引力和应用前景的技术路线。虽然压缩感知算法随着多元化而持续演进,但是其仍面临诸多技术挑战,其中一个关键挑战是选取最优正则化参数没有统一的标准,只能根据经验选择参数并人为调优“试错”,执行效率低,运行时间长。同时,压缩感知方法因为算法本身的局限性只能获取较为浅层的图像信息,无法获取丰富的深层图像信息,这就造成了压缩感知算法在欠采样倍数较大时重建性能差。因此,一味地局限于非线性迭代算法显然无法满足压缩感知雷达成像性能的要求。
技术实现思路
1、本发明的目的是提供一种压缩感知雷达超分辨成像方法、系统及设备能够避免参数人为调优“试错”,缓解一致性参数对不均匀场景重建性能影响的同时降低计算复杂度,提高成像质量。
2、为实现上述目的,本发明提供了如下方案:
3、第一方面,本发明提供了一种压缩感知雷达超分辨成像方法,所述成像方法包括:
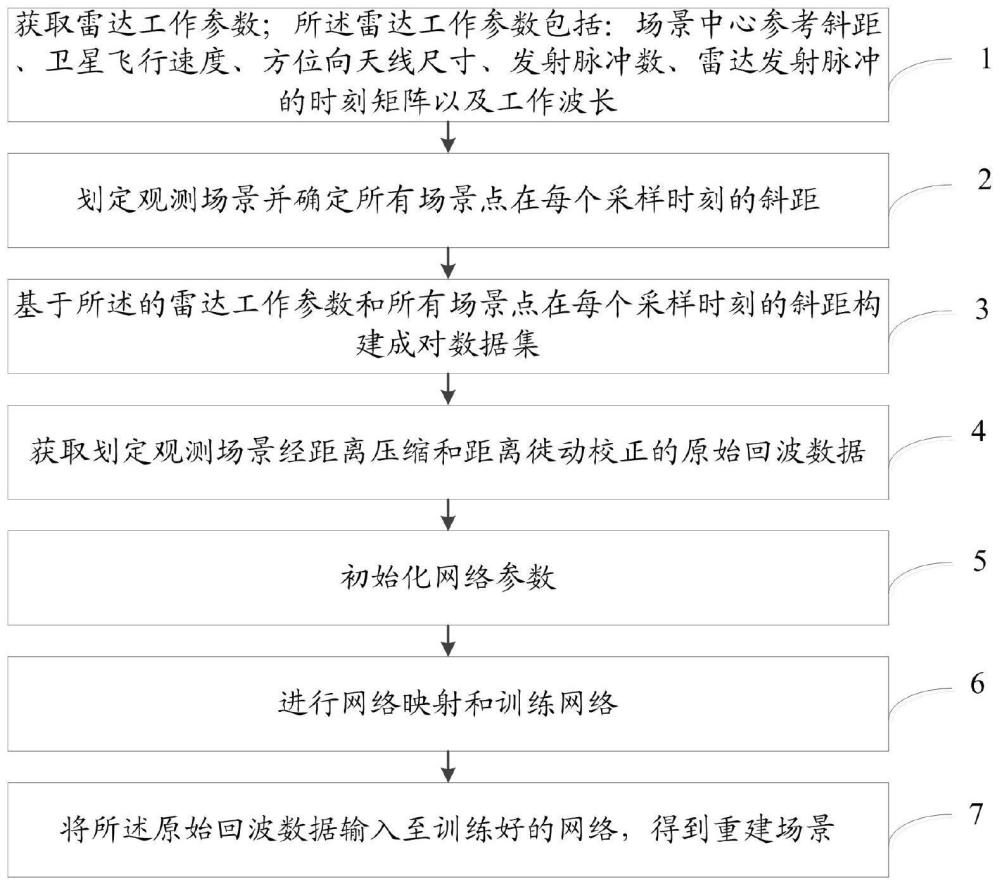
4、获取雷达工作参数;所述雷达工作参数包括:场景中心参考斜距、卫星飞行速度、方位向天线尺寸、发射脉冲数、雷达发射脉冲的时刻矩阵以及工作波长;
5、划定观测场景并确定所有场景点在每个采样时刻的斜距;
6、基于所述的雷达工作参数和所有场景点在每个采样时刻的斜距构建成对数据集;
7、获取划定观测场景经距离压缩和距离徙动校正的原始回波数据;
8、初始化网络参数;
9、进行网络映射和训练网络;
10、将所述原始回波数据输入至训练好的网络,得到重建场景。
11、可选的,基于所述的雷达工作参数和所有场景点在每个采样时刻的斜距构建成对数据集具体包括以下步骤:
12、根据所述雷达工作参数和所有场景点在每个采样时刻的斜距构建重建矩阵;
13、根据所述重建矩阵确定成对数据集。
14、可选的,所述成对数据集的表达式如下:
15、
16、其中,p为训练集中的总数据量,为观测场景,为相对应的回波,d表示重建矩阵,其中dm,n=exp{-j4πrn(ηm)/λ}·ε(((acos(r0/rn(ηm))-0.886*λ/la)))表示穿越时刻为ηm、斜距为rn(ηm)目标点的重建元素,ε(·)表示阶跃函数,λ表示波长,r0表示参考斜距,la表示方位向天线尺寸。
17、可选的,所述划定观测场景经距离压缩和距离徙动校正的原始回波数据的表达式如下:
18、
19、其中,secho,m,n表示穿越时刻为ηm、斜距为rn(ηm)目标点的回波,即回波矩阵secho当中第m行、第k列的元素。
20、可选的,所述初始化网络参数具体包括:
21、初始化重建场景:
22、
23、其中,表示初始化场景,dh表示重建矩阵的共轭转置,表示训练集中经距离压缩和距离徙动校正后的原始回波数据;
24、初始化网络参数:
25、μ(g)=ln(1+exp(a1g+b1)),a1<0
26、θ(g)=ln(1+exp(a2g+b2)),a2<0
27、
28、其中,{a1,b1,a2,b2,a3,b3}被初始化为{-0.5,-0.2,1,-2,-1,0},g表示迭代次数。
29、可选的,所述进行网络映射具体包括以下模块:
30、(1)模块υ(g):通过求解二次线性规划方程获得模块υ(g)的迭代求解结果
31、υ(g)=σ(g-1)-μ(g)dh(dσ(g-1)-s)
32、其中,g表示迭代次数,υ(g)表示表示第g次迭代过程中的最小二乘求解结果,σ(g-1)表示第(g-1)次迭代过程中的场景重建结果,μ(g)表示当前迭代的优化参数,dh表示重建矩阵的共轭转置,d表示重建矩阵,σ(g-1)表示上一层迭代σ的结果,s表示经距离压缩和距离徙动校正后的原始回波数据;
33、(2)模块ξ(g):
34、ξ(g)=diag(1/(|γ(υ1(g))|+ι(g)),1/(|γ(υ2(g))|+ι(g)),…,1/(|γ(υm(g))|+ι(g)))
35、其中,ξ(g)表示迭代过程中的加权矩阵,γ(·)表示场景稀疏变换域,ι(g)表示第g迭代过程中的优化参数,υm(g)表示υ(g)中的第m个元素;
36、(3)模块ω(g):
37、ω(g)=γ-1((ξ(g))-1·θ(ξ(g)·γ(υ(g)),δ(g)))
38、其中,γ-1(·)表示γ(·)中的逆变换,δ(g)表示第g迭代过程中的优化向量,θ(·)表示近端算子求解算法,ω(g)表示第g迭代过程中稀疏变换域中的近端算子求解的结果;
39、(4)模块σ(g):
40、σ(g)=ω(g)+γ(g)(ω(g)-ω(g-1))
41、其中,γ(g)表示第g迭代过程中的优化参数,σ(g)表示表示经过动量加速收敛后的重建结果。
42、第二方面,基于本发明中的上述方法,本发明另外提供一种压缩感知雷达超分辨成像系统,所述成像系统包括:
43、雷达工作参数获取模块,用于获取雷达工作参数;所述雷达工作参数包括:场景中心参考斜距、卫星飞行速度、方位向天线尺寸、发射脉冲数、雷达发射脉冲的时刻矩阵以及工作波长;
44、观测场景模块,用于划定观测场景并确定所有场景点在每个采样时刻的斜距;
45、成对数据集构建模块,用于基于所述的雷达工作参数和所有场景点在每个采样时刻的斜距构建成对数据集;
46、原始回波数据获取模块,用于获取划定观测场景经距离压缩和距离徙动校正的原始回波数据;
47、初始化模块,用于初始化网络参数;
48、网络映射和训练模型,用于进行网络映射和训练网络;
49、成像模块,用于将所述原始回波数据输入至训练好的网络,得到重建场景。
50、第三方面,本发明还提供一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述的压缩感知雷达超分辨成像方法。
51、第四方面,本发明提供一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述的压缩感知雷达超分辨成像方法。
52、根据本发明提供的具体实施例,本发明公开了以下技术效果:
53、本发明公开了一种压缩感知雷达超分辨成像方法,具体包括:获取雷达工作参数;所述雷达工作参数包括:场景中心参考斜距、卫星飞行速度、方位向天线尺寸、发射脉冲数、雷达发射脉冲的时刻矩阵以及工作波长;划定观测场景并确定所有场景点在每个采样时刻的斜距;基于所述的雷达工作参数和所有场景点在每个采样时刻的斜距构建成对数据集;获取划定观测场景经距离压缩和距离徙动校正的原始回波数据;初始化网络参数;进行网络映射和训练网络;将待成像的原始数据输入至训练好的网络,得到重建场景。本发明中的上述方法利用深度学习减少传统非线性迭代算法大量的计算开销,提高成像速度并避免参数人为调优“试错”,且能够对压缩感知雷达进行快速、准确的成像。
- 还没有人留言评论。精彩留言会获得点赞!