高斯过程回归模型多扩展目标PMBM跟踪方法
本发明属于雷达目标跟踪,尤其涉及高斯过程回归模型多扩展目标pmbm跟踪方法。
背景技术:
1、多目标跟踪(multiple target tracking,mtt)是对获得的多源测量集进行处理,对目标当前状态的进行估计。mtt问题一直是雷达目标跟踪领域的难点,其求解的最大困难在于复杂的数据关联决策,点目标mtt定义为在每个时间步长每个目标最多产生一次测量的跟踪目标。然而,现代高分辨率传感器的广泛应用以及近距离检测目标的迫切需求,使得传感器在一个采样周期往往对应目标的多个量测,该目标跟踪问题即扩展目标跟踪(extended target tracking,ett)。由于扩展目标对应了多个量测,这进一步加剧了mtt关联关系的模糊化和复杂性,为研究设计稳健的多扩展目标跟踪(multiple extendedtarget tracking,mett)方法带来了非常大的困难和挑战。
2、mahler基于有限集统计(finite set statistics,fisst)理论的mtt方法的提出,给目标跟踪领域带来了新的生机活力。其中,满足共轭先验的滤波算法是目前fisst-mtt研究方法的主流,主要包括广义标签多伯努利(generalized labeled multi-bernoulli,glmb)滤波器以及泊松多伯努利混合(poisson multi-bernoulli mixture,pmbm)滤波器。相较于glmb滤波器以及其他不满足共轭先验的滤波算法而言,pmbm滤波器由于具有更加高效的滤波结构和较少的全局假设,在整体跟踪性能和稳定性等方面的提升使得它在解决mtt问题上脱颖而出。
3、现在主流的解决扩展目标问题包括随机矩阵模型(randommatrices,rm)、随机超曲面模型(random hypersurface model,rhm)以及高斯过程回归模型(gaussianprocesses regression,gpr)。其中,对称正定的rm利用目标的椭圆形状假设,并采用高斯逆wishart分布对目标的扩展状态进行有效表征,是当前扩展目标跟踪中应用最广泛的一种形状建模方法。但是,不规则形状显然更具辨识度,对该问题的研究也逐渐成为扩展目标跟踪技术的新兴热点。rhm采用傅里叶级数展开来参数化未知的径向函数,可以根据不同的应用场景,动态自适应集群目标的不规则外形。然而,在复杂随机环境中,傅里叶级数展开只能在一定程度上粗略描述目标轮廓特征。等人提出用gpr描述目标径向函数,相比于随机超曲面模型,该方法是建立在概率描述的基础之上,允许以自然的方式指定学习函数的后验分布,因而泛化能力更强,对任意复杂形状可以更加有效的描述。因此,利用gpr精确描述星凸外形扩展目标并结合性能优越的pmbm跟踪方法,进而实现复杂环境下多扩展目标的跟踪,对于现代目标跟踪系统的性能提升无疑具有重大的现实意义。
技术实现思路
1、为解决上述技术问题,本发明提出了高斯过程回归模型多扩展目标pmbm跟踪方法,在pmbm多目标滤波器的基础上拓展gpr的鲁棒自适应不规则目标外形的能力,深入研究复杂不确定性跟踪环境中星凸不规则形状多扩展目标跟踪方法,这对于复杂环境多集群目标的精确跟踪与深度辨识将建立科学的理论依据,有效解决具有星凸外形的多扩展目标联合估计问题。
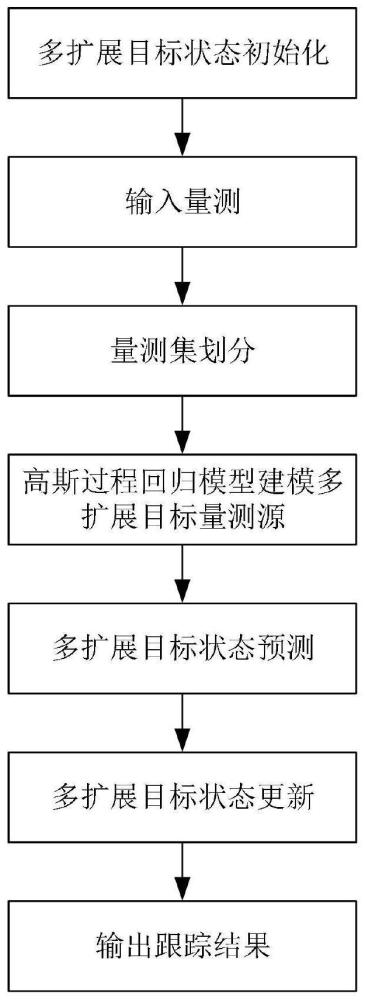
2、为实现上述目的,本发明提出了高斯过程回归模型多扩展目标pmbm跟踪方法,包括:
3、获取多扩展目标量测;
4、对多扩展目标量测集合进行划分,获得多扩展目标与量测之间的最佳匹配;
5、利用高斯过程回归模型对所述最佳匹配中的所述多扩展目标的量测源分布进行建模,获得目标表面量测模型;
6、基于所述目标表面量测模型,对所述多扩展目标的状态进行预测和更新。
7、可选的,获取多扩展目标量测前还包括:对多扩展目标状态初始化,获得先验概率密度,其中,所述多扩展目标状态包括:多扩展目标运动状态和扩展状态。
8、可选的,对多扩展目标量测集合进行划分,获得所述多扩展目标与量测之间的最佳匹配包括:
9、利用距离划分法对所述多扩展目标量测集合进行划分,即计算所述量测集中每一对量测的马氏距离,根据距离阈值,将所述马氏距离小于所述距离阈值的所述量测划分为同一个量测单元,获得所述多扩展目标与量测之间的最佳匹配。
10、可选的,所述马氏距离为:
11、
12、其中,δij为k时刻第i个量测与第j个量测之间马氏距离,r是量测集的协方差矩阵,dq为任意的距离阈值且满足dq≥0,为k时刻第i个量测,为k时刻第j个量测,1≤i≠j≤n,n为k时刻传感器接收到量测的数目。
13、可选的,利用高斯过程回归模型对所述多扩展目标的量测源分布进行建模,获得目标表面量测模型包括:
14、利用所述高斯过程回归模型对径向函数建模,结合目标量测模型,得到高斯过程回归模型描述的所述目标表面量测模型。
15、可选的,利用所述高斯过程回归模型对径向函数建模包括:
16、所述目标量测模型一般形式为:
17、zk=f(uk)+ek
18、其中,zk是函数f(uk)在训练输入uk处的噪声量测值,ek~n(0,r)为满足均值为0,协方差为r的高斯量测噪声。
19、结合径向函数对星凸形扩展目标轮廓表面模型表示为:
20、
21、其中,zk,l为k时刻第l个量测源产生的量测,是k时刻目标的质心位置,为方向向量,θk,l为目标量测对应的角度,f(θk,l)为θk,l对应的半径值,ek,l~n(0,r)为量测噪声;
22、结合高斯过程回归建模目标轮廓表面模型得到非线性量测方程,即:
23、
24、其中,zk,l为k时刻第l个量测源产生的量测,为k时刻目标状态xk到量测zk,l的映射,为量测噪声。
25、可选的,基于所述目标表面量测模型,对所述多扩展目标的状态进行预测包括:分别对运动状态和扩展状态进行预测,并根据所述先验概率密度,获得满足共轭先验的预测目标状态概率密度。
26、可选的,基于所述目标表面量测模型,对所述多扩展目标的状态进行更新包括:
27、对未知目标未关联到量测的更新、未知目标关联到量测的更新、已知目标的漏检更新和已知目标关联到量测的更新,其中,所述未知目标关联到量测的更新和已知目标关联到量测的更新,需利用最优非线性滤波求解所述高斯过程回归模型中非线性的量测方程,获得目标量测似然函数,结合所述目标量测似然函数,对所述多扩展目标的状态进行更新。
28、与现有技术相比,本发明具有如下优点和技术效果:
29、本发明提出了高斯过程回归模型多扩展目标pmbm跟踪方法,利用高斯过程回归模型对星凸不规则形状扩展目标进行精确建模,并利用最优非线性滤波处理高斯过程回归模型中高度非线性的量测方程,结合扩展泊松多伯努利混合滤波器,颇为有效的解决了复杂环境下多扩展目标运动和形状估计跟踪问题。其中,高斯过程是一种概率模型,允许以自然的方式指定学习函数的后验分布,能够更加精确的描述具有星凸形不规则形状目标的轮廓细节,能够更好地联合估计目标的运动状态和扩展状态。而et-pmbm滤波器采用了更为先进的共轭先验假设,将尚未检测到的扩展目标信息考虑其中,可以对潜在目标的假设数量进行有效管理,使得滤波递推过程更加完善,故本发明在运动状态估计和形状估计等方面均表现出更加出色且稳定的性能。本发明在现有技术中多扩展目标所面临的强不确定性环境中的适应性更强,是处理雷达星凸形不规则形状多扩展目标复杂跟踪问题更为科学的求解方法。
- 还没有人留言评论。精彩留言会获得点赞!