一种用于钢管内壁的损伤监测方法及装置与流程
本技术涉及钢管内壁监测,具体涉及一种用于钢管内壁的损伤监测方法及装置。
背景技术:
1、许多工业场所都会使用到小管径钢管,小口径钢管在工业中被广泛用于油井内和油井外的管道系统,具有抗压、耐腐蚀和耐高温等特性。
2、然而,由于小管径钢管是用于输送液体或气体的重要性,小管径钢管的安全性至关重要;为了避免潜在风险,无损探伤技术被用于及早发现并评估钢管内壁的裂纹、腐蚀和变形等缺陷。目前,可选用目视检测方法,通过将内窥镜或目镜插入钢管内,直接观察钢管内壁的表面状况。但目视检测方法依赖于人工观察,无法准确检测微小损伤,导致检测结果不准确且难以及时发现损伤,从而增加安全事故的风险。
3、因此,亟需可解决上述技术问题的一种用于钢管内壁的损伤监测方法及装置。
技术实现思路
1、本技术提供了一种用于钢管内壁的损伤监测方法及装置,该方法通过第一探伤机器人和第二探伤机器人对待检测管道进行无损检测,提升对管道进行无损检测的效率和准确性,减少人工干预导致检测结果不准确的情况出现。
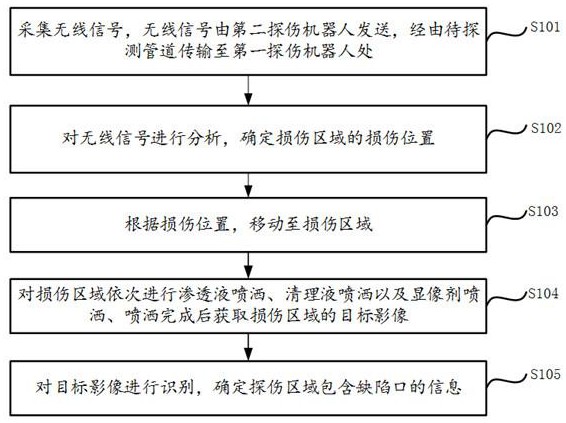
2、第一方面,本技术提供了一种用于钢管内壁的损伤监测方法,应用于第一探伤机器人,第一探伤机器人位于待探测管道的第一末端,第一探伤机器人与第二探伤机器人通信连接,第二探伤机器人位于待探测管道的第二末端,方法包括:采集无线信号,无线信号由第二探伤机器人发送,经由待探测管道传输至第一探伤机器人处;对无线信号进行分析,确定损伤区域的损伤位置;根据损伤位置,移动至损伤区域;对损伤区域依次进行渗透液喷洒、清理液喷洒以及显像剂喷洒、喷洒完成后获取损伤区域的目标影像;对目标影像进行识别,确定探伤区域包含缺陷口的信息。
3、通过采用上述技术方案,第二探伤机器人发送无线信号,并经过待检测管道传输至第一探伤机器人处,第一探伤机器人对采集的无线信号进行分析处理,确定损伤区域的损伤位置,第一探伤机器人根据损伤位置移动到损伤区域,再进行一系列喷洒操作以得到目标影像,再对目标影像进行识别处理,可确定损伤区域包含缺陷口的信息,无损检测由第一探伤机器人获取,大大减少了人工操作导致不准确情况的发生。
4、可选的,在对无线信号进行分析,确定损伤区域的损伤位置之前,方法还包括:对无线信号进行预处理,得到处理信号;对处理信号进行分解提取,得到频域信号;确定频域信号的频率值;判断频率值是否大于或等于预设频率阈值;若频率值大于或等于预设频率阈值,则初步确定待探测管道存在缺陷口。
5、通过采用上述技术方案,对无线信号进行处理和分解提取,可识别待探测管道内壁的缺陷区域,通过判断频率值是否大于或等于预设频率阈值,可初步确定待探测管道是否存在缺陷口,减少人工操作的不准确性,提高了对待探测管道的检测效率。
6、可选的,对无线信号进行分析,确定损伤区域的损伤位置;具体包括:确定第一时间数据,第一时间数据包括采集无线信号的时间;获取第二探伤机器人发送的第二时间数据,第二时间数据包括第二探伤机器人采集到无线信号的时间;根据第一时间数据和第二时间数据,确定时间差;根据时间差,计算损伤区域距离第一末端的长度距离;根据长度距离,确定损伤位置。
7、通过采用上述技术方案,获取第一时间数据和第二时间数据,可快速获取无线信号的采集时间,并根据第一时间数据和第二时间数据确定时间差,再通过时间差计算长度距离,根据损伤区域到第一末端之间的长度距离,进而定位损伤位置,为后续根据损伤位置对管道进行检测和维修。
8、可选的,对损伤区域依次进行渗透液喷洒、清理液喷洒以及显像剂喷洒、喷洒完成后获取损伤区域的目标影像;具体包括:获取目标位置,目标位置为第一探伤机器人在待探测管道的位置;判断目标位置是否位于损伤区域内;若目标位置位于损伤区域内,则确认从目标位置对待探测管道进行渗透液喷洒,以得到第一喷洒区域。
9、通过采用上述技术方案,获取第一探伤机器人在管道中的位置,即目标位置,确定第一探伤机器人已移动至损伤区域,再对目标位置喷洒渗透液,以得到第一喷洒区域,通过第一探伤机器人自动化对管道损伤区域进行喷洒,避免需对整个待探测管道进行喷洒,减少资源浪费。
10、可选的,在若目标位置位于损伤区域内,则确认从目标位置对待探测管道进行渗透液喷洒,以得到第一喷洒区域之后,方法还包括:获取第一喷洒区域,第一喷洒区域为已进行渗透液喷洒的区域;对第一喷洒区域进行清水清洗表面渗透液,得到第二喷洒区域,清水清洗表面渗透液为清理液喷洒。
11、通过采用上述技术方案,对第一喷洒区域进行清水清洗表面渗透液,可消除第一喷洒区域的渗透液残留物,以得到第二喷洒区域,通过清洗管道表面渗透液可去除损伤区域的液体痕迹,减少误判,有助于后续确定损伤位置。
12、可选的,对第一喷洒区域进行清水清洗表面渗透液,得到第二喷洒区域,具体包括;获取第二喷洒区域,第二喷洒区域为已进行清理液喷洒的区域;对第二喷洒区域进行显像剂喷洒,显像剂喷洒用于将待探测管道对应的损伤位置进行显示;确认对待探测管道进行喷洒完成后,获取目标摄像头拍摄的管道图像,管道图像为目标影像。
13、通过采用上述技术方案,对第二喷洒区域进行显像剂喷洒,可将待探测管道上的损伤位置显示出来,根据显像剂的使用,可准确定位管道上的损伤位置,以方便后续对损伤位置进行修复,再获取目标摄像头拍摄的管道图像,以得到目标影像,目标影像可提供管道的实际情况和损伤位置的详细视觉信息,有助于后续根据目标影像制定合理的维修方案。
14、可选的,对目标影像进行识别,确定探伤区域包含缺陷口的信息,具体包括:对目标影像进行预处理,得到处理后的目标影像;获取第一管道特征,第一管道特征为对处理后的目标影像任意一个区域进行特征提取得到;判断第一管道特征与第二管道特征是否相同;若第一管道特征与第二管道特征不相同,则确认第一管道特征对应的区域存在缺陷口。
15、通过采用上述技术方案,对目标影像进行预处理,预处理可优化目标影像的图像质量,提高后续特征提取和分析的准确性,再从处理后的目标影像中提取第一管道特征,将第一管道特征与第二管道特征进行比较,当第一管道特征与第二管道特征不相同时,则确认第一管道特征对应的区域存在缺陷口,可快速定位和识别管道的缺陷口所在的区域,及时采取维修措施。
16、在本技术的第二方面提供了一种用于钢管内壁的损伤监测装置,装置为第一探伤机器人,第一探伤机器人包括获取单元、处理单元以及确认单元;第一探伤机器人位于待探测管道的第一末端,第一探伤机器人与第二探伤机器人通信连接,第二探伤机器人位于待探测管道的第二末端;获取单元,采集无线信号,无线信号由第二探伤机器人发送,经由待探测管道传输至第一探伤机器人处;处理单元,对无线信号进行分析,确定损伤区域的损伤位置;根据损伤位置,移动至损伤区域;对损伤区域依次进行渗透液喷洒、清理液喷洒以及显像剂喷洒、喷洒完成后获取损伤区域的目标影像;确认单元,对目标影像进行识别,确定探伤区域包含缺陷口的信息。
17、可选的,处理单元用于对无线信号进行预处理,得到处理信号;对处理信号进行分解提取,得到频域信号;确认单元用于确定频域信号的频率值;处理单元用于判断频率值是否大于或等于预设频率阈值;确认单元用于若频率值大于或等于预设频率阈值,则初步确定待探测管道存在缺陷口。
18、可选的,确认单元用于确定第一时间数据,第一时间数据包括采集无线信号的时间;获取单元用于获取第二探伤机器人发送的第二时间数据,第二时间数据包括第二探伤机器人采集到无线信号的时间;处理单元用于根据第一时间数据和第二时间数据,确定时间差;根据时间差,计算损伤区域距离第一末端的长度距离;确认单元用于根据长度距离,确定损伤位置。
19、可选的,获取单元用于获取目标位置,目标位置为第一探伤机器人在待探测管道的位置;处理单元用于判断目标位置是否位于损伤区域内;确认单元用于若目标位置位于损伤区域内,则确认从目标位置对待探测管道进行渗透液喷洒,以得到第一喷洒区域。
20、可选的,获取单元用于获取第一喷洒区域,第一喷洒区域为已进行渗透液喷洒的区域;处理单元用于对第一喷洒区域进行清水清洗表面渗透液,得到第二喷洒区域,清水清洗表面渗透液为清理液喷洒。
21、可选的,获取单元用于获取第二喷洒区域,第二喷洒区域为已进行清理液喷洒的区域;处理单元用于对第二喷洒区域进行显像剂喷洒,显像剂喷洒用于将待探测管道对应的损伤位置进行显示;确认单元用于确认对待探测管道进行喷洒完成后,获取目标摄像头拍摄的管道图像,管道图像为目标影像。
22、可选的,处理单元用于对目标影像进行预处理,得到处理后的目标影像;获取单元用于获取第一管道特征,第一管道特征为对处理后的目标影像任意一个区域进行特征提取得到;处理单元用于判断第一管道特征与第二管道特征是否相同;确认单元用于若第一管道特征与第二管道特征不相同,则确认第一管道特征对应的区域存在缺陷口。
23、在本技术第三方面提供一种电子设备,电子设备包括处理器、存储器、用户接口及网络接口,存储器用于存储指令,用户接口和网络接口用于与其他设备通信,处理器用于执行存储器中存储的指令,使得一种电子设备执行如本技术上述中任意一项的方法。
24、在本技术第四方面提供一种计算机可读存储介质,计算机可读存储介质存储有指令,当指令被执行时,执行本技术上述中任意一项的方法。
25、综上所述,本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
26、1、第二探伤机器人发送无线信号,并经过待检测管道传输至第一探伤机器人处,第一探伤机器人对采集的无线信号进行分析处理,确定损伤区域的损伤位置,第一探伤机器人根据损伤位置移动到损伤区域,再进行一系列喷洒操作以得到目标影像,再对目标影像进行识别处理,可确定损伤区域包含缺陷口的信息,无损检测由第一探伤机器人获取,大大减少了人工操作导致不准确情况的发生。
27、2、对无线信号进行处理和分解提取,可识别待探测管道内壁的缺陷区域,通过判断频率值是否大于或等于预设频率阈值,可初步确定待探测管道是否存在缺陷口,减少人工操作的不准确性,提高了对待探测管道的检测效率。
28、3、获取第一时间数据和第二时间数据,可快速获取无线信号的采集时间,并根据第一时间数据和第二时间数据确定时间差,再通过时间差计算长度距离,根据损伤区域到第一末端之间的长度距离,进而定位损伤位置,为后续根据损伤位置对管道进行检测和维修。
29、4、获取第一探伤机器人在管道中的位置,即目标位置,确定第一探伤机器人已移动至损伤区域,再对目标位置喷洒渗透液,以得到第一喷洒区域,通过第一探伤机器人自动化对管道损伤区域进行喷洒,避免需对整个待探测管道进行喷洒,减少资源浪费。
- 还没有人留言评论。精彩留言会获得点赞!