一种基于CIC-PC的高速弹丸测速传感器、测量方法及测量系统
本发明涉及弹丸速度测量,具体涉及一种基于cic-pc的高速弹丸测速传感器、测量方法及测量系统。
背景技术:
1、随着现代科技的发展,军事武器也在不断精进,弹丸速度作为衡量武器性能的一个重要指标,通过把控武器的弹丸速度可以提高武器的准度与稳定性,因此精准地测量弹丸速度就显得十分重要。
2、现在常用的弹丸测速方法有高速摄影与多普勒雷达测速等,这些技术造价昂贵且使用门槛高,使用环境要求严格,传统的靶纸测速造价低廉,稳定度高,但测速精准度易受弹丸材料与形状影响,造成数据漂移,且结构单一,平面电容阵列传感器灵敏度高但测速易受环境干扰造成错误测量,且现有的测速方法中对测速数据优化较低,部分不良或者错误数据可能造成测速失准以及人力物力的浪费。
3、综上所述,研发一种基于cic-pc的高速弹丸测速传感器、测量方法及测量系统,仍是弹丸速度测量技术领域中急需解决的关键问题。
技术实现思路
1、针对现有技术所存在的问题,本发明的目的在于提供一种基于cic-pc的高速弹丸测速传感器、测量方法及测量系统。
2、为实现上述目的,本发明提供了如下技术方案:
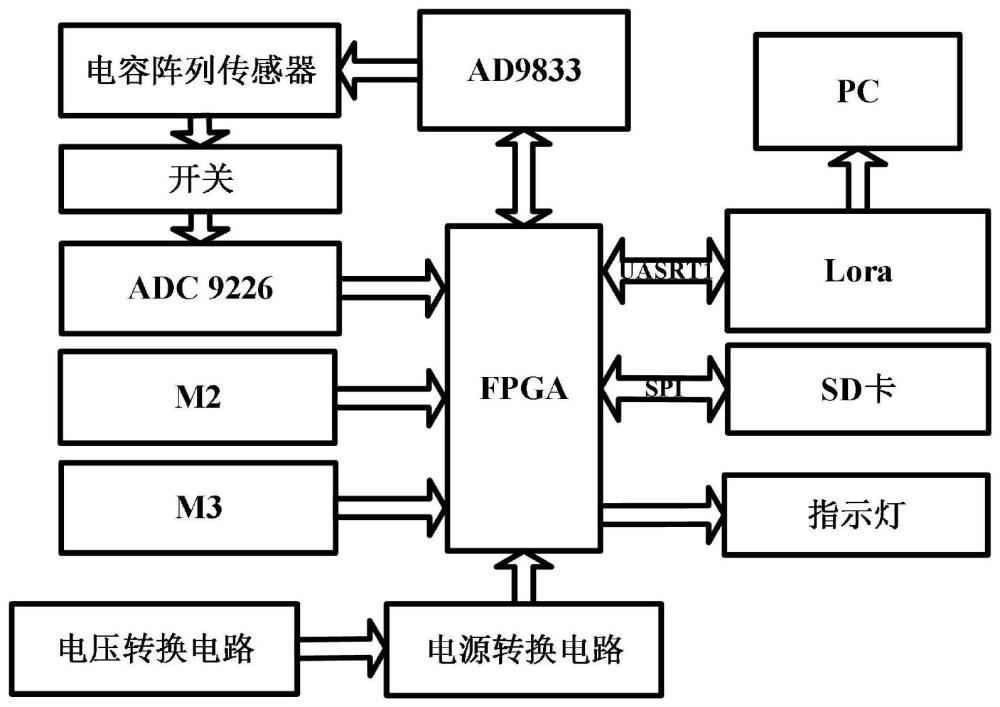
3、一种基于cic-pc的高速弹丸测速传感器,包括第一传感器和测速电路,所述第一传感器的后侧设置有第二传感器,所述第一传感器包括绝缘体层,所述绝缘体层的两侧对称设置有导体层,所述测速电路包括信号调理电路、fpga芯片、开关电路、激励可编程发生器、模数转换器、sd卡、lora、指示灯、电源转换电路和电压转换电路;
4、所述第一传感器和第二传感器负责弹丸数据的测量,所述测速电路负责弹丸数据的处理与输出,所述第一传感器由两块材料、大小、形状均一致的测速传感器屏幕m1、m2组成,且两块测速传感器屏幕m1、m2呈直列式固定间距摆放,所述第一传感器采用能在子弹通过瞬间产生短路脉冲的三层结构,所述导体层选用薄铝板,所述绝缘体层选用瓦楞纸板,所述第二传感器为平面电容阵列传感器m3,且由四个摆放距离相近并呈现矩形阵列的平面电容电极组成,中间部分为裁剪为固定形状的平面电容电极。
5、一种基于cic-pc的高速弹丸测速传感器的测速系统,包括传感器模块、信号调理电路模块、数据处理模块、数据输出模块、指示灯电路模块和电源模块:
6、所述传感器模块用于测量弹丸数据;
7、所述信号调理电路模块用于对传感器模块检测的数据进行放大、滤波,包括待测电容传感器cx、基准电容cref、放大器a1、放大器a2、减法器a3、放大器a4、滤波器a5和峰值检波器;
8、所述数据处理模块用于对传感器采集的数据进行处理,包括数据的模数转换,数据的训练以及数据的预测与矫正;
9、所述数据输出模块用于将处理过的数据无线上传至pc端供实时监测并记录;
10、所述指示灯电路模块用于指示系统测速过程完成的状态;
11、所述电源模块用于对传感器和测速电路进行供电。
12、本发明进一步设置为:所述传感器模块包括第一传感模块和第二传感模块;
13、所述第一传感模块用于检测记录弹丸通过第一传感器所经历的飞行时间;
14、所述第二传感模块利用平面电容电极进行多通道抽样,检测弹丸在抽样时间内靠近第二传感器途中经历的飞行距离。
15、本发明进一步设置为:所述数据处理模块包括fpga模块、开关电路模块、激励模块和模数转换模块;
16、所述fpga模块用于记录第一传感模块的脉冲时间差,计算并训练bp神经网,所述fpga模块连接第一传感模块的数据输出端与模数转换模块的数据输出端;
17、所述开关电路模块可以实现第二传感模块的四路采集通道设计,完成数据的信号抽样,所述开关电路模块的四个数据端口分别接第二传感模块的四片平面电容电极,且所述开关电路模块的数据输出端接入模数转换模块的数据输出端;
18、所述激励模块可以实现精准激励信号的输出,所述激励模块的数据输入端接入fpga模块,且数据输出端接入第二传感模块;
19、所述模数转换模块可以实现对第二传感模块抽样数据进行采集。
20、本发明进一步设置为:所述数据输出模块包括无线模块和存储模块,所述电源模块包括电压转换电路模块和电源转换电路模块;
21、所述无线模块用于将处理过的数据无线上传至pc端,所述无线模块的rx输入端接入fpga模块的tx输出端,且所述无线模块的tx输出端接入fpga模块的rx输入端;
22、所述存储模块采用sd存储卡对数据进行存储;
23、所述电压转换电路模块用于将28v的直流电转换为24v的直流电,可以为第一传感模块与第二传感模块进行供电;
24、所述电源转换电路模块用于对数据处理模块、数据输出模块和指示灯电路模块进行供电。
25、一种基于cic-pc的高速弹丸测速传感器的测量方法,包括以下步骤:
26、s1、激励模块对传感器进行激励;
27、s2、fpga检测传感器模块发出的信号;
28、s3、fpga通过数据处理模块对传感器模块的信号进行抽样处理;
29、s4、利用处理好的数据进行bp神经网络训练,得到训练好的网络;
30、s5、fpga通过训练好的模型进行数据预测与矫正;
31、s6、指示灯显示测量过程的完成状态。
32、本发明进一步设置为:在步骤s2中,具体包括以下步骤:
33、s21、第一传感模块在弹丸通过m1后产生第一个脉冲,其中第一个时刻产生的脉冲t1作为fpga中断计时的启动信号;
34、s22、第二传感模块在弹丸通过m2后产生第二个脉冲,其中第二个时刻t2作为fpga中断计时的启动信号。
35、本发明进一步设置为:在步骤s3中,具体包括以下步骤:
36、s31、依次对第二传感模块轮流抽样,每一轮得到4点数据,分别为d1~d4,其中d1为最新的采样点,每一点数据包括弹丸距离传感器中心位置坐标(xi,yi)以及平面电容传感器的电压变化值△vi;
37、s32、对每一轮的4点数据进行线性加权位置估计,得到加权位置:
38、
39、其中,δvi为各传感器采集到的电压值,xi、yi为平面电容当前电压值对应的传感器单元中心位置的坐标;
40、s33、将第一传感模块得到的中断计时时间差与m1,m2摆放的固定距离进行相除,得到速度数据v1;
41、s34、将第二传感模块得到的两轮加权位置差与两轮的抽样时间差进行相除,得到速度数据v2;
42、s35、将数据v1与v2求平均数,得到v:
43、
44、s36、将平均速度转换成16进制帧格式存储在sd卡中。
45、本发明进一步设置为:在步骤s4中,具体包括以下步骤:
46、s41、读取存储在sd卡中的16进制帧格式数据,将不同的数据划分于不同的数据类型,与该数据类型的特征一同存于数据集中;
47、s42、把数据集划分为训练集与测试集;
48、s43、建立bp模型,定义模型的优化算法,激活函数的类型,设置模型的最大迭代次数,学习率衰减系数以及隐藏层的大小;
49、s44、通过划分的训练集进行训练,得到训练好的网络与预测模型;
50、s45、通过划分的测试集测试训练好的网络。
51、本发明进一步设置为:在步骤s5中,具体包括以下步骤:
52、s51、把训练好的网络与预测模型存储到sd卡中,fpga把sd卡中的预测模型导入到自身的dram动态随机存储器中;
53、s52、主控制器把传感器模块新一轮的采集数据导入到fpga内的bram中;
54、s53、将输入数据导入到dram中内,调用主控制器的fpga的ip核心,进行预测;
55、s54、fpga调用网络中的激活函数运算,输出预测结果与误差;
56、s55、通过经由网络的输出结果与误差,判定本次测速的误差率,并将其作为新加入的数据划分到训练集与测试集,加入新一轮的训练。
57、有益效果
58、采用本发明提供的技术方案,与已知的公有技术相比,具有如下
59、有益效果:
60、(1)本发明中,采用多个传感器耦接的方式来检测,cic-pc传感器的设计,大大提高了传感器的稳定性,提高了速度测量的准度,且可以实现在各种环境下完成测量各种口径与材料弹丸的速度,相比较于传统的弹丸测速具有低成本,高精度,便捷性,适用场景范围广,实时监测的优势。
61、(2)本发明中,采用bp神经网络处理数据,对测速过程前进行预测,减少了噪声信号的干扰,对测速过程后的速度进行检验,训练结果可对测速数据进行矫正补偿,提高了速度检测的准确度,大大提高了速度检测的效率。
62、(3)本发明中,传感器选材低廉,大大降低了弹丸测速的成本,平面电容阵列传感器阵列采用多通道采集的办法,将不同抽样时刻的数据隔离,各个通道协同工作加强了抽样数据的多样性,提高了抽样数据的准确度。
- 还没有人留言评论。精彩留言会获得点赞!