一种激光雷达辅助的GNSS非视距信号筛选方法和装置
本发明属于定位,特别是涉及一种激光雷达辅助的gnss(globalnavigation satellite system,gnss)非视距信号筛选方法和装置。
背景技术:
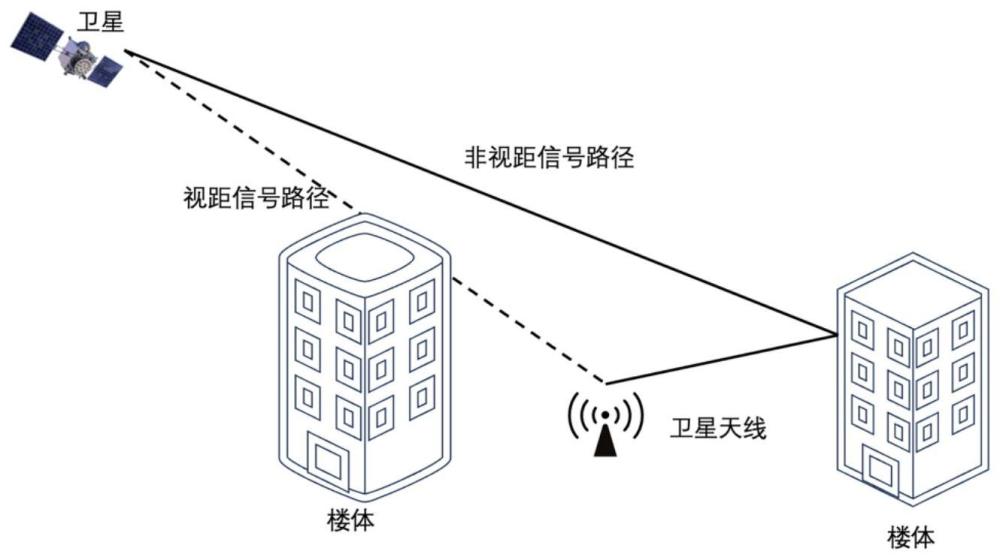
1、gnss是能在地球表面或近地空间的任何地点为用户提供全天候的3维坐标和速度以及时间信息的空基无线电导航定位系统。有多种因素影响gnss的定位精度,其中包括卫星轨道误差、电离层和对流层延迟,以及非视距(non-light-of-sight,nlos)卫星信号等。特别是在遮挡环境下,例如城市高楼环境等遮挡因素引起的nlos卫星信号严重影响定位结果。其中,nlos信号是指由于建筑物或其他障碍物的反射或衍射而到达接收机的gnss信号,它们的传播路径复杂,会导致伪距量测中包含大量无法建模的噪声项,从而影响定位精度。因此nlos信号的筛选是提高gnss定位精度的重要前提。
2、通常,nlos信号的筛选是基于残差序列检测的方法。其中,包括接收机自主完好性监测(receiver autonomous integrity monitoring,raim),其通过计算卫星伪距的验后残差,逐个判断可能存在异常的卫星信号,来达到筛选nlos信号的目的。但是,当存在大量nlos信号时,raim需要进行多轮检测,运算复杂度高。另一种是基于三维城市模型(3d mapaide,3dma)的nlos信号检测方法,该方法通过阴影匹配检验量测信号的可用性,并利用建筑物边界,从三维城市模型预测卫星能见度,从而提高卫星定位精度。然而,3dma局限性在于它既依赖于三维城市模型的先验知识,又需要高昂的计算成本来区别los信号和nlos信号。这导致该方法的泛化能力不足以及计算效率低下。因此,目前还没有一种实时有效的nlos信号筛选方法,来提高gnss系统在遮挡环境下的定位精度与鲁棒性。
技术实现思路
1、本发明要克服现有技术的上述缺点,提供一种激光雷达辅助的gnss非视距信号筛选方法和装置,以提高遮挡环境下的定位精度与鲁棒性。
2、本发明的第一个方面是:一种激光雷达辅助的gnss(global navigationsatellite system,gnss)非视距信号筛选方法,包括如下步骤:
3、步骤s1:目标接收当前历元卫星星历,并计算卫星在导航坐标系下的坐标;
4、步骤s2:获取激光雷达数据帧,并进行畸变处理,将处理后的数据加入到缓存中,构建在t时刻导航坐标系下的激光雷达局部点云地图mt;
5、步骤s3:利用惯性测量单元(inertial measurement unit,imu)得到目标的先验位置,并计算导航坐标系下目标与卫星i之间的航向角度信息ai与俯仰角信息ei;
6、步骤s4:对时刻t内的所有卫星进行遍历,并在局部地图mt上搜索目标到卫星i之间的点云信息。如在搜索范围内发现目标与卫星i之间存在大于阈值的点云个数,则筛选卫星i,否则遍历下一颗卫星,直到时刻t所有卫星遍历完成;
7、步骤s5:将筛选后卫星组的观测量与imu机械编排提供的先验信息进行位置修正。通过双差伪距观测与双差载波相位观测进行量测更新,得到修正后的位置信息,如下一时刻有卫星与激光雷达数据则返回步骤s1,否则步骤结束。
8、其中,所述步骤s1包含以下子步骤:
9、s11:目标通过接收机获得卫星i的卫星星历,通过卫星星历计算得到卫星i在导航坐标系下的坐标其中,上标n代表导航坐标系;下标i代表第i颗卫星;下标e,n,u分别表示坐标在导航系东、北、天上的分量。
10、其中,所述步骤s2包含以下子步骤:
11、s21:获取当前帧雷达数据,并对获得的雷达数据进行去畸变处理,遍历当前激光帧起止时刻之间的imu数据,根据每一帧点云中每一个点的时间戳,计算该点到该帧点云起始点的旋转平移变换,将每一个点变换到起始点的坐标系;
12、s22:将去畸变后的雷达数据帧存储到大小为20的缓存空间中,缓存空间保存最近最新的20帧雷达数据,利用雷达帧缓存空间中的点云数据构建局部雷达点云地图。
13、其中,所述步骤s3包含以下子步骤:
14、s31:设imu在导航坐标系下的先验位置信息为pn=[pe,pn,pu]t,利用步骤s1中得到的卫星i在导航系下的坐标计算先验位置pn与卫星i之间的向量vn:
15、
16、因此有单位向量
17、
18、其中,上标n代表导航坐标系;下标u代表为单位向量;||vn||代表向量vn的模长;下标e,n,u分别表示坐标在导航系东、北、天上的分量;
19、s32:通过单位向量计算导航系下载体到卫星之间的航向角:
20、
21、俯仰角:
22、
23、通过遍历每一颗卫星得到导航系下目标到卫星i的航向角ai与俯仰角信息ei,为后续在雷达局部点云地图搜索提供搜索信息。
24、其中,所述步骤s4包含以下子步骤:
25、s41:在t时刻下有雷达局部点云地图mt,目标到卫星i的航向角ai与俯仰角ei,雷达点云搜索半径rs,nlos信号检验阈值tt,搜索范围rf;
26、s42:将mt转换为kdtree形式的数据储存,kdtree有助于提高雷达点云的搜索效率。现有t时刻下目标雷达中心在导航坐标系下的坐标:
27、其中上标l表示雷达,以为原点利用步骤s4得到的卫星i航向角ai信息与俯仰角信息ei进行搜索,通过给定一个固定的搜索步长δd来进行第k轮搜索点的更新:
28、
29、
30、
31、其中,下标k表示第k轮搜索;
32、s43:对新的搜索点进行kdtree搜索,如果在第k轮搜索半径rs内得到的点个数pk>tt则认为载体到卫星之间存在障碍物,则判定此卫星为nlos信号卫星进行筛除,否则当总搜索半径kδd>rf时判定此卫星为los信号;
33、s44:重复s42与s43过程,直到时刻t的所有卫星遍历完成,得到筛选后的卫星组sl。
34、其中,所述步骤s5包含以下子步骤:
35、s51:在筛选后的卫星组sl与基准站卫星组sb中寻找共视卫星,并在每个卫星系统内寻找主卫星,主卫星采用卫星组sl中俯仰角度最高的卫星;
36、s52:gnss接收机有如下公式:
37、
38、
39、
40、其中,γ代表对应频点的波长;代表载波相位观测;下标r代表接收机;t代表t时刻;上标s代表卫星s;代表接收机到卫星s的距离;cl代表光速,δr,t代表接收机钟差;代表卫星s的钟差;代表电离层延时;代表对流层延时;为载波相位偏移;代表表示载波相位校正项,包括天线相位偏移和变化、地球潮汐造成的台站位移以及卫星时钟的相对性校正;代表伪距观测;ψr,0,t代表接收机本地振荡器的初始相位;代表从卫星发射的导航信号的初始相位;代表载波相位的整周模糊度;代表多径效应干扰、非视距信号、接收机噪音和天线延迟等;
41、s53:双差伪距量测方程:
42、
43、其中,和代表基准站所接收到卫星s与主卫星w的伪距观测值;上标sw表示卫星s与卫星w之间做双差;下标b表示基准站在t时刻接收到的值;下标r表示接收机;下标dd代表双差观测。高仰角的卫星信号通常会有更少的非视距信号干扰和相对少的多径效应,因此更加倾向于选择高仰角的卫星来作为主卫星,将主卫星标记为上标w。通过做双差解算后消除大气干扰项和钟差干扰项;
44、s54:双差载波相位量测方程:
45、
46、其中,和代表基准站所接受到的载波相位观测值,载波相位双差解算后同样消除了大气干扰项与钟差干扰,但中还包含双差整周模糊度;
47、s55:现有双差伪距观测方程:
48、
49、
50、
51、其中,pr,t代表接收机t时刻在ecef坐标系下的位置;下标x,y,z分别表示在ecef坐标系下x轴,y轴,z轴的分量;代表卫星s在t时刻的位置;代表卫星w在t时刻下的位置;pb代表基准站的位置;代表与伪距相关的噪声项。因此,双差伪距的误差因子可以表示为:
52、
53、其中,表示的协方差;
54、s56:有双差载波相位观测方程:
55、
56、
57、其中,代表的相关噪声;代表双差整周模糊度;因此有双差载波相位的误差因子:
58、
59、表示的协方差矩阵;
60、s57:惯性导航误差因子:
61、
62、
63、
64、其中,上标ins代表ins因子;vt-1表示目标在ecef坐标系下的速度;表示在t时刻目标在ecef坐标系下的加速度;δt表示相邻两个ins因子的时间间隔;表示ins因子的协方差矩阵;
65、s58:因此有目标函数:
66、
67、
68、其中,变量χ*表示状态集的最优估计;pr,t与vr,t代表目标t时刻在ecef坐标系下的位置与速度;代表t时刻卫星组的双差模糊度。因此,通过求解上述目标函数,可以得到经过nlos卫星筛选后的gnss-rtk在当前历元的浮点解,使用模糊度固定算法来估计固定解,最终得到经过nlos信号筛选的修正位置信息。如下一时刻有卫星与激光雷达数据则返回步骤s1,否则步骤结束。
69、本发明的第二个方面涉及一种激光雷达辅助的gnss非视距信号筛选装置,包括存储器和一个或多个处理器,所述存储器中存储有可执行代码,所述一个或多个处理器执行所述可执行代码时,用于实现本发明的激光雷达辅助的gnss非视距信号筛选方法。
70、本发明的一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时,实现本发明的激光雷达辅助的gnss非视距信号筛选方法。
71、本发明的工作原理是:使用激光雷达对目标周围环境进行局部点云地图的构建,并计算卫星相对于目标的位置,若卫星与目标之间的连线存在大于阈值的点云个数,则判断为nlos信号。
72、本发明的优点是:本发明采取一种基于激光雷达辅助的nlos信号筛选方法,能更快速高效的筛选在城市遮挡等环境下的nlos信号。
- 还没有人留言评论。精彩留言会获得点赞!